漫步最优化四十一——Powell法(下)
Posted 会敲键盘的猩猩
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了漫步最优化四十一——Powell法(下)相关的知识,希望对你有一定的参考价值。
四季交替,
光阴推动了变更,
但你一直印在我心。
遇见你的那天,
心似击鼓般兴奋,
呼吸似乎都有了震音。
想你想的入神,
想你充满能量,
想你醒了也像晕了,
想你不由自主的笑了。
——畅宝宝的傻逼哥哥
对于步骤1, d01,d02,…,d0n 为坐标方向。对于步骤2, f(x) 沿着 xk0,xk1,…,xkn 最小化。对于步骤3, f(x) 在新的共轭方向最小化,对于凸二维问题来说,该算法搜索模式如图4所示。
Powell算法的主要优点是不需要海森矩阵,更进一步,通过使用基于线搜索的一维算法,梯度也不需要。
但是Powell算法有时候不一定线性无关,这样的话生成的方向集无法生成
En
,即便是凸二次问题也存在这样的情况,如果第二步中最小化
f(xk(j−1)+αdkj)
时存在某个
j
使得
即新生成的方向不包含
dkj
,因为
dkj
别舍弃掉了,这样的
n
个方向集合无法张成
上面的问题可以被避免到,那就是如果出现线性相关,那么下次迭代的话我们不改变方向集,然后得到新的共轭方向。因为下次迭代的时候我们是从新的点
xk
开始的,所以是可能产生新的方向的。
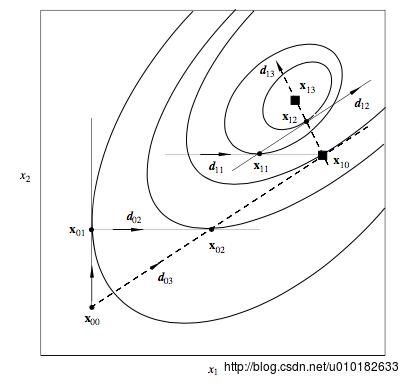
图4
原则上如果至少有一个 αki 为零,那么将产生线性相关。不幸的是,由于计算机精度有限, αki 的值不可能为零,所以检查 αki