UWB主动定位系统在自动驾驶中的应用实践
Posted 成都新能源汽车产业联盟
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了UWB主动定位系统在自动驾驶中的应用实践相关的知识,希望对你有一定的参考价值。
UWB主动定位系统在自动驾驶中的应用实践
肖波 电子科技大学车联网校友会执行秘书长
成都新能源汽车产业联盟特聘专家
1、自动驾驶的前世今生
过去车辆都是手动挡,司机依靠手脚复杂配合,大脑反应及时、以及车和上路经验积累才能把车开好、开稳、平顺省油,驾驶员就是一个职业,具备一定身体素质要求才能胜任。随着自动档车辆大量出现,降低了手脚的复杂配合配合,解放了大脑反应度,开车变得轻松自在,驾驶员的门槛逐渐降低,越来越多的人可以胜任司机的职能。现在驾驶辅助系统ADAS,包括有车道保持辅助系统、自动泊车辅助系统、刹车辅助系统、倒车辅助系统和行车辅助系统等。未来更多的传感器加入车辆,提供更多的危险预警,开车就变得更自动化,高速路的自动巡航ACC等功能出现,大大降低开车的熟练度要求,解放了驾驶员的视线。更多AI算法加昂贵的激光雷达传感器、毫米波雷达加到车上后,可以实现不再依靠人脑控制车辆,开始进入自动驾驶阶段。
关于自动驾驶的分级,目前国际上普遍认可的是SAE(国际汽车工程师协会)的标准,分为L0-L5,共六级,SAE在2018年6月份对该标准做了最新的修订。L1之前是L0级,意味着完全为手动人工操作,系统最多只提供一些辅助的警告和信号,比如倒车时候的雷达提醒、行车时候的距离提醒;L1便有一些辅助功能介入驾驶操作,可称为辅助驾驶。比如自适应巡航、自动紧急刹车等,系统开始对车辆有主动的操控行为;L2系统能自动驾驶车辆,但驾驶员要时刻保持注意力,随时准备接管汽车的驾驶。L3的自动驾驶实现了较高程度的机器操作,驾驶员可以完全放弃操控,只有在少数情况下需要接管汽车;而L3与L4间存在着巨大的鸿沟,即方向盘完全消失。L3系统需要考虑人机协同,人类操作和机器操作的切换,L4则不考虑人类介入车辆的操作,到了最高的L5就实现了道路车辆的完全智能化。
车辆实现自动驾驶就需要知道车辆在道路的精准位置信息,目前依靠GPS+RTK、惯导、激光雷达、毫米波雷达、超声波雷达、视频视觉、UWB等,甚至需要更多道路信息,实现V-2X协同,确保车辆自动驾驶安全。但即使我们的技术可以实现真正意义上的自动驾驶,目前来看成本还是非常高的。若干车企宣布了2020-2021年左右实现L3自动驾驶车辆量产计划,从目前来看,整套自动驾驶系统最便宜也要3万美元以上,相当于一辆中级车的价格。自动驾驶四大核心技术分别为环境感知、高精度定位、路径规划、控制执行。其中环境感知技术是最基础、最重要的一环。通过环境感知,可实时、可靠且准确的识别出车辆行驶路径周边对其安全行驶可能存在隐患的物体,为车辆的行为决策和路径规划提供可靠的信息源。随着自动驾驶热潮,众多企业涌入环境感知技术产品的研究,目前已取得阶段性进展。但成本过高、技术不成熟、国内外技术产品差距大仍是阻碍行业发展的主要因素。
2、自动驾驶的商业应用
包罗万象的全能自动驾驶系统,就目前的技术条件来看还比较困难,包括传统车企、技术公司、零部件供应商以及运营商在内的所有行业人士以及意识到,无人车面临的商业化困境才开始。上月Waymo负责人说:在未来的几十年内,自动驾驶汽车做不到无处不在,它会一直存在限制。在很长一段时间内,自动驾驶汽车都会需要司机的协助。目前存在的几个难题:1、无人车的感知层做的不够准2、决策能力由于路测公里数不足受限3、对执行控制层的把握不足4、缺乏合格的AI 芯片。
因此为自动驾驶技术的应用限定一个区域,也许是工程师们踩过无数坑后得出的最符合尝试且最节省成本的方法。在一些细分领域,自动驾驶却可以率先实现落地,例如固定路线低速行驶的环卫车、港口的集装箱货车、封闭小区的物流车、室内停车库,以及园区的接驳车等场景。在垂直领域深耕,以及与行业寡头进行合作,是推进自动驾驶技术快速落地的趋势,国内自动驾驶先驱百度、驭势、智行者、文远知行、AutoX等企业都在尝试,当然成本也是限制规模商业的进程。目前,AutoX已在美国加州推出无人驾驶生鲜递送服务:AutoX Autonomous Delivery。在此项服务的初始试运营区域,从用户叫车到无人车到达,配送完成只需要十几分钟。
3、自动驾驶现有车辆定位的痛点:
1. 高速行驶
室外高速移动可以依靠GPS/BEIDOU定位,一些区域靠RTK精准定位。移动站通过对所采集到的卫星数据和接收到的数据链进行实时载波相位差分处理(历时不足一秒),得出厘米级的定位结果。车辆速到达到120KM/H后,每秒移动33米,100MS为3.3米,加之GPS的数据传输时延较高,需要DSRC/V-2X等技术车路协同。才能支持满足自动驾驶安全需要。
2. 密集场景
大型停车场等车辆聚集密集场景,众多车辆进出停车场,需要对所有车辆实时定位和路径规划调度导航,才能保证有序不混乱。此时没有GPS/BEIDOU 信号,WIFI/BLE等定位技术是适合寻车等简单业务,传统UWB定位系统无法适应大量车辆的定位调度及服务器位置信息处理导致的时延,导致自动驾驶依然有较大缺陷与隐患。
3. 高低位置
立交桥、涵洞、隧道等场景下,由于无法收到GPS/BEIDOU 信号,且现在某些场景,如立交桥需要定位区分上下层,现有技术难以满足这样的精度要求,无法对车辆定位,需要其他方式的定位手段,尤其是需要无盲区定位,确保车辆平滑稳定的自动行驶。
4、 寻ME主动定位解决方案
精位科技基于UWB技术的深厚底层研究以及丰富的应用实践经验,提出了UWB可以在自动驾驶特殊场景发挥绝对作用,设备网络成本比其他类似功能的传感器价格低,定位精度更高。为此改变了传统UWB的被动定位方式拓扑结构,克服被动定位系统在自动驾驶应用中的几个致命问题,颠覆性提出了寻ME主动定位系统,实现了以下功能:
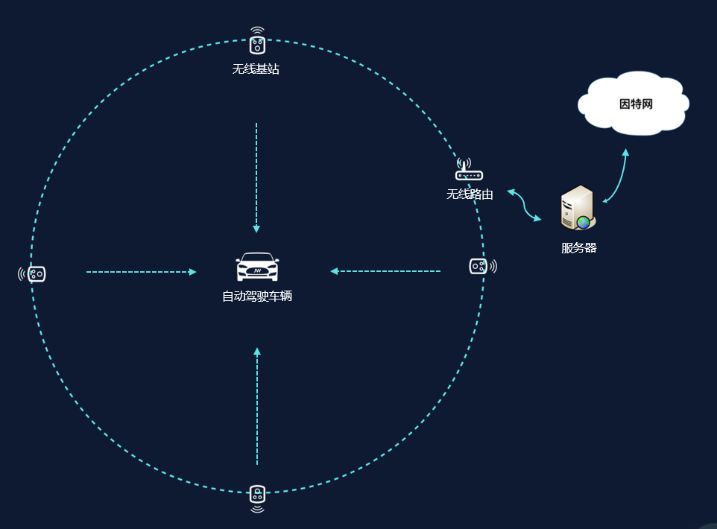
1. 广播式发射,分布式解算
2. 定位系统无容量限制
3. 定位响应时延大大缩短
4. 拓扑结构等同GPS/BEIDOU
5. 实现UWB定位与GPS/北斗定位无盲区的切换
6. 精位UWB芯片即将量产,批量化后等同于蓝牙WiFi芯片价格
7. 车辆在实际环境测试定位精度小于5CM
8. 开发基于UWB位置信息的云管理系统,系统实时管理车闸、地锁、车位空闲灯、路径导航、车辆调度广告促销信息的发布等
9. 后期基站可以实现全无线的同步连接.
5、应用范畴及技术成熟度
1. RTLS实时定位是UWB的最基本性能,基于车辆和停车场的位置信息,辅助以超声波传感器,就能满足AVP实现,以及AEB/LDW位置偏移告警等基本ADAS功能。
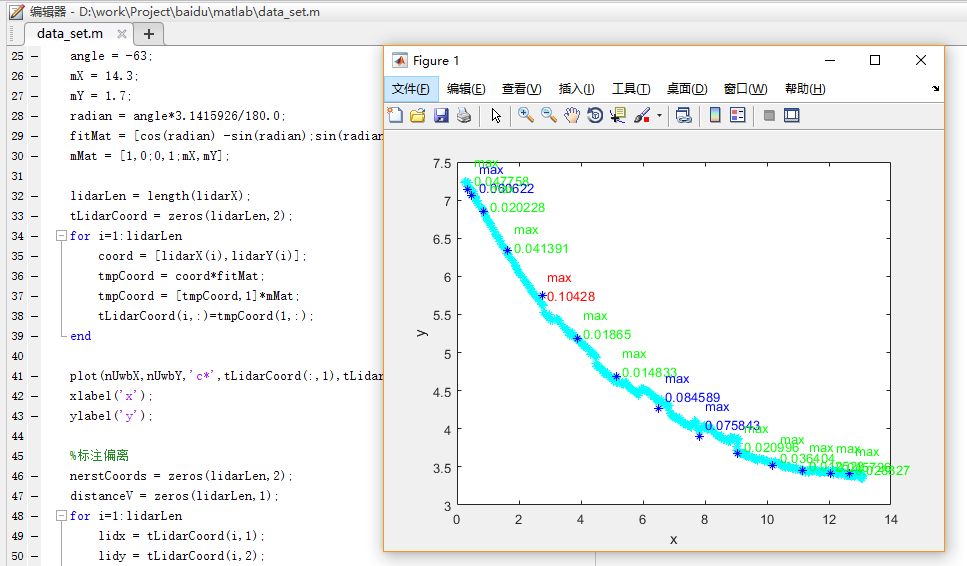
2. 这是真实环境下,激光雷达测试点( 选取了25个测试点,深蓝色)与UWB连续定位曲线(浅蓝色线)的,可以看出吻合的非常好,测试精度小于5CM,完全符合车辆驾驶的需要,目前在进行更大范围外场/更多功能测试。
6、精位芯片规划(“精位一号” UWB芯片)
精位科技从2012年就推出国内第一套UWB高精度实时定位系统,多次刷新UWB指标,率先提出主动定位并实现商用。在此基础上开发设计了国内第一个UWB芯片--精位一号JR3401 ,同时推出相应的终端和基站配套模组,提供定位平台,满足合作伙伴顺利及时开发出自己定位系统。芯片产品2018年12月即将下线商用。
无人自动驾驶、智能汽车是汽车产业的发展趋势,当我们讨论智能汽车这些前沿科技时,千万不要忘记其基本的网络安全,智能汽车是通过车联网实现的,当前汽车厂商提供的云服务和数字服务已经不是什么新鲜事物,很多网友的车都具备这些功能。网络安全的问题也酒日益凸显,汽车产业面临着严峻的安全挑战。
汽车厂商也在不断加大汽车网络安全的投入,网络安全的方案可选择性很多,但汽车网络安全投入与传统网络安全不同。需要在保障实时性的同时保证网络安全,这给网络安全领域带来了极大的挑战。
新能源汽车产业联盟在2018年2月成立,在这个国际化、开放性的交流平台上精准对接汽车行业资源,以新能源和智能驾驶为讨论热点,聚焦汽车新技术、新模式,探索产业链条新机遇,务实推进产业高水平发展,努力促进成都市新能源汽车产业发展,用成都的“软实力”(集成电路和软件、人才、环境、历史文化底蕴、消费环境与包容性等)引领新能源汽车产业生态和创新应用运营模式,把成都打造成国际领先、智能网联、绿色低碳的新能源汽车产业高地。
以上是关于UWB主动定位系统在自动驾驶中的应用实践的主要内容,如果未能解决你的问题,请参考以下文章