揭幕:宝马的可扩展AV自动驾驶汽车架构
Posted 汽车电子电气架构创新发展论坛
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了揭幕:宝马的可扩展AV自动驾驶汽车架构相关的知识,希望对你有一定的参考价值。
宝马本月初在由TTTech Auto组织的名为Autonomous的基于网络的活动中首次披露了其自动驾驶汽车路线图-跨越1级,3级和4/5级。
该路线图显示了一家将车辆安全放在首位的公司。
鉴于大多数AV销售商仍对其AV架构保密,因此汽车行业观察者对宝马的透明度感到惊讶。宝马列出并确定了要整合到其车辆中的主要构造块和主要芯片的供应商(请参见下面的图1)。
VSI Labs的创始人兼首席分析师Phil Magney对EE Times说:“以前我们曾见过宝马和Mobileye的花絮,但这是硬件架构和可扩展性路径的最全面视图。” 他补充说:“对于OEM来说,透露这么多有关其AV堆栈的信息有点不寻常。”
可扩展性
宝马的AV平台架构明确了该公司的AV设计重点。他们专注于软件和硬件的可伸缩性和可重用性。
从当前的第2级到第4/5级汽车,在所有宝马乘用车中,硬件和软件在ECU和摄像头之间都得到了尽可能多的重用。宝马的基础平台基于AUTOSAR(汽车开放系统架构),使用经典的微控制器(宝马使用英飞凌的Aurix)。
随着自动驾驶及其功能水平的提高,宝马通过部署其他传感器系统和高端微处理器来满足这些需求。该平台的基准使用英飞凌的Aurix和瑞萨电子的R-CAR SoC来优化其在立体声前置摄像头中的应用。
对于3级车型,宝马将添加两个Mobileye EyeQ5,两个Intel Denverton CPU和另一个Aurix。对于4/5级车辆,宝马将配置扩展到三个EyeQ5,一个至强24C和Aurix。
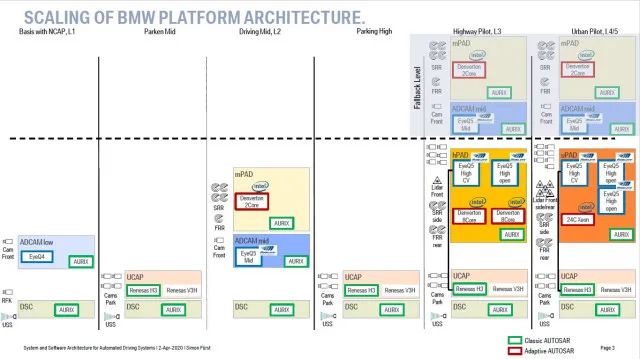
图1:宝马的可扩展平台架构。单击上图以PDF格式查看。(来源:宝马)
设计安全
Magney告诉EE Times,“首先,我喜欢AV堆栈的分区。L1 / L2被归类为ADAS,而L3 / L4 / L5被归类为HAD(高度自动驾驶)。一切都是增量的。在宝马架构下,L2成为L3的后备。” 他补充说:“这些系统运行独立的ECU,并且都使用经典和自适应AUTOSAR。在HAD级别上,您依赖于两个ASIL-B通道……因此,系统的安全性总体上要高于其各个部分的总和。”
对于许多汽车原始设备制造商而言,“安全第一”已成为他们推动AV开发工作的关键话题。但是汽车制造商如何设计安全的自动驾驶汽车仍然是一个鲜为人知或公开辩论的问题。
但是,宝马在高度自动化的驾驶架构中公开了其AV路线图和安全至上战略,从而产生了分歧。
Doer Checker 方法
正如在“Autonomous”上介绍的那样,菲斯特解释说,宝马已经安装了双处理架构(主计算机和备用计算机),以确保L3,L4和L5车辆的安全。在该架构下,通过主要和次要ASIL通道,主要通道可计算车辆的主要轨迹。辅助AV在那里监视主要频道。
每当辅助通道检测到主要通道正在生成会导致事故或崩溃的轨迹时,它将提醒选择器,选择器会切换到辅助通道提供的安全轨迹。菲斯特(Fürst)确认这是一种经典的检查方法:“是的。这两个渠道一直在交叉检查。”
但是,值得注意的是,主ASIL通道也与辅助通道进行交叉检查。当通道发现自己在轨迹上存在分歧或“不合适”时,系统将进入降级模式。这由另一个由独立电源驱动的处理模块处理。即使出现重大停电,这也可以使汽车继续以降级模式运行。简而言之,宝马使用2级堆栈作为3级的备用。
该故障降级的通道使用单独的电源运行,旨在执行计算为回退轨迹的最小风险策略。该通道的功能独立于主系统。它可以驱动多余的制动/转向系统,使车辆进入安全位置。但是正如Fürst所指出的那样,该冗余单元无法执行全部功能。“它只有有限的能力。”
“现代与经典”
当被问及宝马的整体平台架构时,麦格尼观察到:“对我来说,这看起来像两全其美。您拥有既现代又经典的建筑。系统的一种系统,低级系统成为高级系统的后备。您还可以结合使用经典方法和AI方法。AI主要用于感知,而回退则基于经典的确定性算法。”
麦格尼称宝马的系统“从功能安全的角度来看非常实用。” 他解释说,拥有多个ECU最好是确保不受干扰。在遵守汽车功能安全的ISO 26262标准方面,麦格尼称宝马的安全体系“或多或少是最先进的”。
那是宝马。那其他汽车制造商呢?麦格尼说,宝马在做的事情“可能与其他人在做的事情相似。”
SIL B或ASIL D
Fürst指出,这种系统设计的主要优点是“系统的主要部分仅是ASILB。只需要很小的部分即可成为ASILD。”
这些小部件包括车辆动态ECU(运动控制),故障降级ECU中的轨迹跟踪控制和运动控制,以及标称ECU中的选择器,轨迹跟踪控制器。
传感器融合难题
各种传感器解决了许多不同的功能。感官评估的主要部分是检测道路上的物体,包括乘用车,卡车,摩托车,自行车和行人。
至关重要的不仅是物体检测,还包括“计算这些物体的轨迹”和“自由空间”的理解。
AV 系统提供了一些基于计算机视觉的道路监控机制,但它也可以使用雷达和激光雷达的其他输入来检测道路的曲率。该系统还可以使用其他车辆的数据。它可以使用地图生成汽车的轨迹以进行某些定位。定位对于系统找出相对于全局地图的位置以及正确计算路线很重要。
传感器融合并不像听起来那样简单。数据级别包括原始数据,分类数据和高级数据。例如,来自雷达,激光雷达和摄像机的原始数据的外观各不相同。虽然必须将不同的算法应用于不同的传感器,但数据级别会进一步增加复杂性。但是,目标是找到“一种巧妙的方法,将这些不同的数据组合在一起,以在传感器评估范围内实现一定的冗余度,”Fürst解释说。
当被问及解释“聪明的方法”时,弗斯特说:“在这个传感器融合领域,正在产生许多科学研究论文。”业界仍然需要对如何将不同的算法应用于不同的传感器模式建立起基本的了解。
麦格尼(Magney)指出,除了有太多利用数据的方法外,没有什么可以抑制传感器融合了。您需要处理静态世界和动态世界,这需要不同的过程和不同的传感器。”
SafetyFürst-为什么要使用新的ISO标准?
车辆安全有多种标准,但Fürst目前正在帮助定义的标准DTR 4804被视为朝着专门针对自动驾驶汽车的ISO标准化迈出的第一步。
去年,11个行业领导者(Aptiv,奥迪,百度,宝马,大陆集团,戴姆勒,菲亚特克莱斯勒汽车,HERE,英飞凌,英特尔和大众)聚集在一起发布了名为SaFAD(自动驾驶安全第一)的白皮书。
该小组现在正在推动SaFAD作为ISO DTR 4804的基础。菲斯特说,该小组于2月在巴黎举行了启动会议。扩大后的国际集团包括丰田,日产,电装,马自达,法雷奥等。它计划在7月底之前发布其技术报告。
菲斯特(Fürst)承认,此草案成为ISO标准需要两到三年的时间。但是,从现在开始,业界就有机会为AV安全标准进行最先进的技术开发。
汽车行业的一些消息人士告诉我们,他们发现新的ISO标准的范围“太宽”和“太通用”。EE Times问Fürst为什么他认为这个标准如此重要。如果汽车行业不制定安全标准,后果将是什么?
他说:“如果没有标准,每个汽车OEM都将独立存在……不同的OEM,不同的技术供应商最终将开发出具有不同风险的汽车。”他补充说,视听安全标准的目标是“最大程度地降低总体风险”。“ [安全]标准不应该偏爱一种车型。消费者无法拥有一辆比其他汽车更安全的汽车。每辆车必须安全。”
此外,当汽车原始设备制造商想要更新当前的传感器时,他们需要一个易于转换的通用接口。同样,如果数据结构标准化,“随着新的分类和预处理数据水平开始发挥作用,它可以帮助我们大大改善传感器融合度。” Fürst认为,标准化的接口和数据结构至关重要。
摘自:EETimes

SELECTED EVENTS

长按二维码识别关注
以上是关于揭幕:宝马的可扩展AV自动驾驶汽车架构的主要内容,如果未能解决你的问题,请参考以下文章