自动驾驶架构设计
Posted 自动驾驶攻城狮
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了自动驾驶架构设计相关的知识,希望对你有一定的参考价值。
架构的英文是Architecture,这个词最早起源于建筑业,代表着建筑的构思、设计和施工等整体框架性风格,通常会带有一定的文化属性和艺术风格,比如哥特式、罗马式和巴洛克式。

在做架构的时候就要考虑好需要什么建材、什么尺寸、楼层、门窗、采光通风排水、逃生等等多种因素,整个构思过程能大能小,大能包含文化特色,艺术风格,小能涵盖一砖一瓦。
转换到自动驾驶的架构设计,也是异曲同工;自动驾驶的架构设计要考虑横纵向的控制层次、功能分布、冲突和仲裁解决、系统故障传递和隔离、系统失效安全等,整体的框架如下
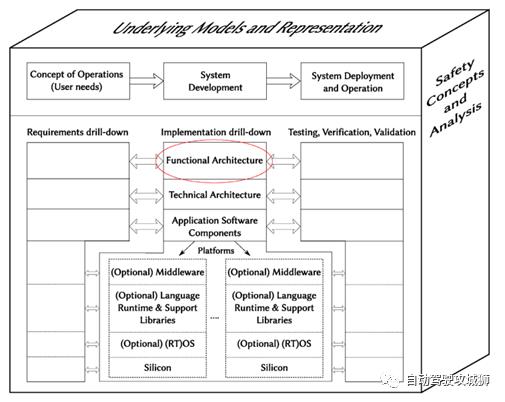
立方体的上面是基础模型、右面是安全概念及其要素解析,本次重点说明下正面的内容:从用户端的需求出发,转化成设计概念,然后根据需求以及设计概念来搭建系统层级的开发内容,最后到系统的执行端;重头戏在于系统开发设计,往下分解包含了功能架构、技术架构和软件架构,就像建筑可以拆解到砖和瓦,自动驾驶架构可以拆分到最底层的硅基芯片。
接下来以功能架构为例,继续挖一挖,其实整体来说功能层面基本对应控制要素的三大件:感知、决策、执行
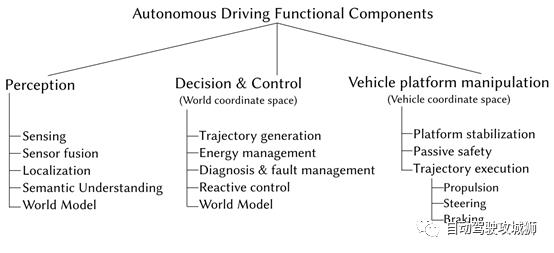
感知包含物理环境感知和融合、定位及高精地图、语义识别和世界模型构建
决策在自动驾驶业内常称作规控,即规划和控制,主要包括轨迹规划、局部避让策略(基于世界模型的感知信息),还有系统监控、诊断以及异常情况下的failsafe/function safety策略。
执行简单来说就是应对各种需求的车辆加速、减速和转向。
这里补充下感知的说法其实应该是广义的,不仅有Radar/Lidar/Sonar/Camera对环境的感知,还有V2X/HMI传递的信息,以及车辆自身G-sensor/Yaw-rate sensor/转速测量等信息。
回到物理世界
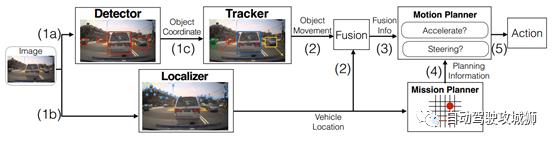
1 一副图片从Camera的imagesensor回传过来后,要对其进行感知、识别、定位,再结合Radar/Lidar回传的多普勒参数以及环境感知信息,融合后得到前方目标的模型。
2- 结合目标的三维相对位置(横纵向距离)、相对速度、加速度、轮廓、分类、置信概率,周围环境的其他交通参与者情况,来决定是应该加速跟车还是刹车拉长车距,根据全局路径规划、当前定位、是否符合变道条件or紧急横向避让等来决定方向盘动作意图。
3- 再根据车辆整体状态以及驾驶员指令综合判断车辆下一步指令数值,既要完成驾驶任务,又要防止运动突变影响舒适性,最终落实到对应的纵向加减速和横向转角控制,从而完成一个周期的车辆动态自动驾驶感知、决策和执行过程,循环往复。
参考文献:
以上是关于自动驾驶架构设计的主要内容,如果未能解决你的问题,请参考以下文章