自动驾驶架构
Posted 子氚
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了自动驾驶架构相关的知识,希望对你有一定的参考价值。
自动驾驶架构
本文整理自公众号九章智驾文章
2万字长文说清自动驾驶功能架构的演进
架构
- 物理(电气)架构: 体现整车电子电气的布置关系与连接关系, 主要工作为电气原理图设计, 电源分配设计, 搭铁分配设计, 二维线束走向&三维布置设计
- 功能(逻辑)架构: 功能实现所需完整电器要素与逻辑关系(传感器-控制器-执行器), 主要工作为功能定义规范, 故障后处理策略
- 系统架构: 体现ECU内部元器件逻辑关系
- 网络架构: 体现各个ECU在哪个网段, 在总线上连接关系, 不同的LIN/CAN/CAN-FD/以太网

分布式ADAS架构

- 分布式开发, 各传感器耦合度低, 各司其职, 集成度低, 开发周期短, 可移植性强
- 传感器配置
- 行车: 5R1V, EQ4在camera中
- 泊车: 4环视+12超声波雷达
- 特点: ECU分散, 软件分散
- 复用性: 无域控制器, 前摄像头可集成EQ4/5作为替代, 纵向横向L1功能接口由相机统一输出对整车控制接口, 功能实现L2, 利于OEM平台化设计
- 灵活性: 可裁剪前毫米波雷达->4R1V架构(健壮性可能↓)
- 兼容性: 捆绑销售EPS, ESP执行器等
- 安全性: AEB存在ASL D的安全目标, 通过执行器限制性能/安全阈值, 降低风险->ASIL B
- 企业: 吉利,长城,比亚迪,长安,广汽,北汽,蔚来,理想
域控式ADAS架构

- 支持L2级别功能, 增加域控制器
- 特点
- 域控式ADAS将控制算法从传感器端->域控制器端, 域控制器做简单的后融合算法
- HMI设计变化, 开关一键多用
- 成本: 域控式成本>分布式, 提高可靠性,健壮性
- 可拓展性: 算法上移(摄像头->域控制器), 视觉依赖单颗SOC,
- 兼容性: 域控制器与底盘控制器接口平台化设计,可作为冗余控制器
- 安全性: 可在执行器(转向&制动)做安全约束, 降低安全功能等级
跨域式ADAS架构(行泊一体)
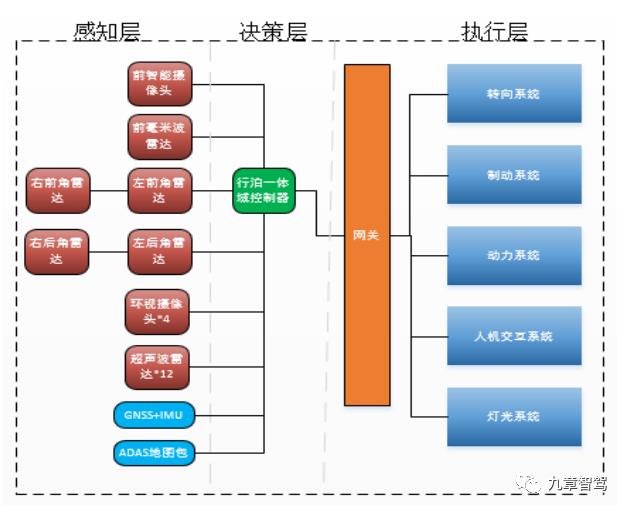
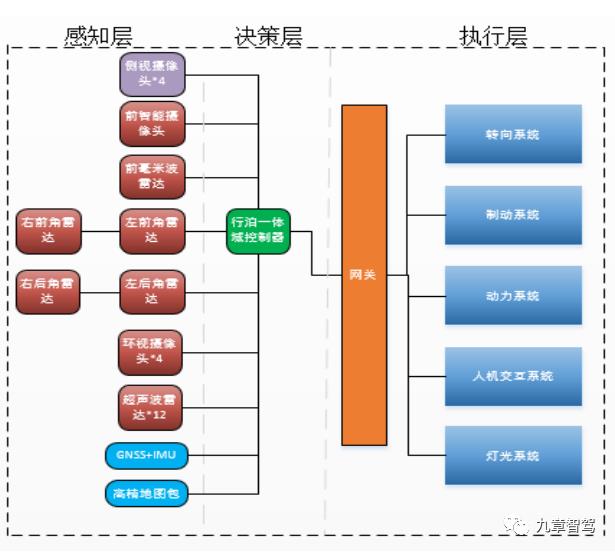
- 硬件上 + GNSS, IMU组合定位, 软件上 + ADAS地图, 行车域+泊车域->行泊一体域控制器
- 功能: L2以下所有ADAS功能
- 局限性: 低配版无法支持车道级定位, 不能安全通过匝道, 无法实现点到点行车; 高配版支持上下匝道,点到点NOA,冗余侧视摄像头数据引入降低目标漏检率
- 安全性: 侧后方无视觉传感器, 仅有角雷达, 主动变道有风险
- 跨域式系统架构设计
- 单SOC+MCU, 华为MDC610控制器
- 双SOC+MCU, 华为MDC810控制器
- 三SOC+MCU, 地平线行泊一体方案
- 单SOC, 知行科技IDC3.0方案, 寒武纪SD5223行泊一体方案
跨域冗余式ADS架构
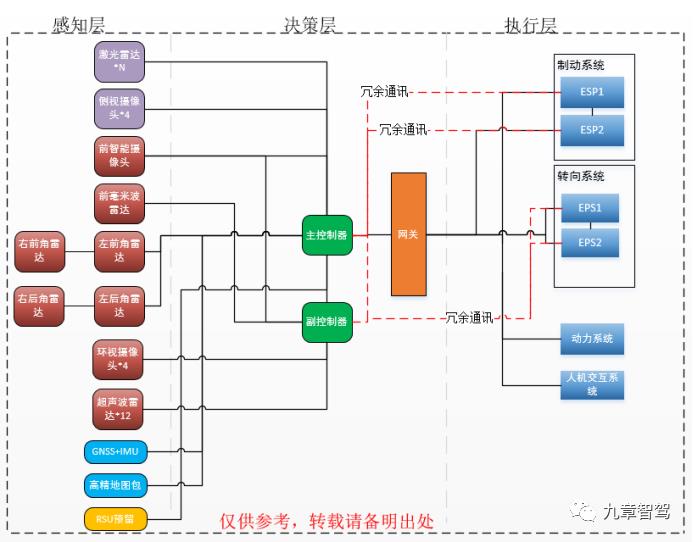
- 主控制器
- 双SOC+MCU, SOC跑感知融合算法+规控算法, MCU为安全岛做整车接口
- 处理激光雷达+前视+侧视摄像头+角雷达+高精地图数据, 硬件传感器FOV重叠做前融合设计, 高精地图为辅助传感器, 提供车道线+车道级定位信息, 道路分流,合流,限速路段道路静态信息
- 主控制器控制请求一路通过网关转发到执行系统, 一路通过冗余私有CAN直接发给执行系统
- 轻微故障管理+故障处理策略切换, 执行预设MRM(冗余传感器遮挡/故障)
- 副控制器
- 行泊一体控制器
- 处理环视摄像头+前视摄像头+前毫米波+超声波雷达数据, 主控制器无故障时将上述目标融合信息转发给主控制器,分担算力
- 独立AEB功能
- 本车道停车
副控制器跟“冗余控制器”不是同一个概念。
冗余: 意味着互相独立,在主控故障后,冗余控制器接管车辆。因此,冗余控制器需要跟主控制器完全解耦,只有L4才会采用这种设计理念(L4的副控制器跟冗余控制器是同一个概念)。
但在L3中,副控制器通常承担算力分担功能——通俗地说就是,它也参与计算,但只是把计算结果发给主控,节省主控算力。在主控挂掉后,副控制器接管整车,实现L2功能,仍可以保留安全行车的能力;或者,能执行MRM就可以。
中央计算平台(行泊舱一体)
以上是关于自动驾驶架构的主要内容,如果未能解决你的问题,请参考以下文章