点云论文速读点云分层聚类算法
Posted 点云PCL
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了点云论文速读点云分层聚类算法相关的知识,希望对你有一定的参考价值。
点云PCL免费知识星球,点云论文速读。
标题:PAIRWISE LINKAGE FOR POINT CLOUD SEGMENTATION
星球ID:Lionheart|点云配准
●论文摘要
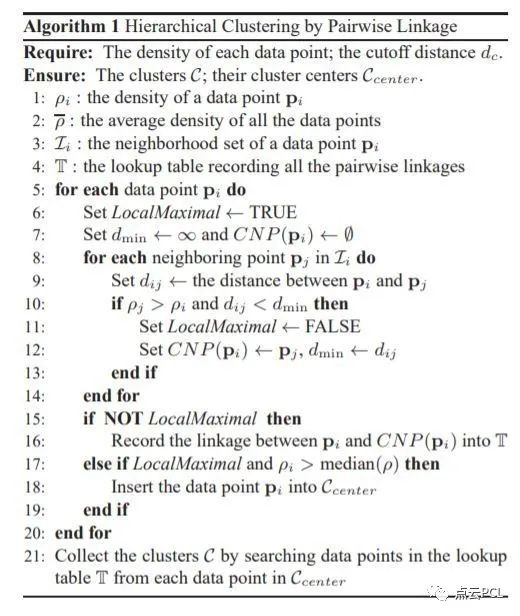
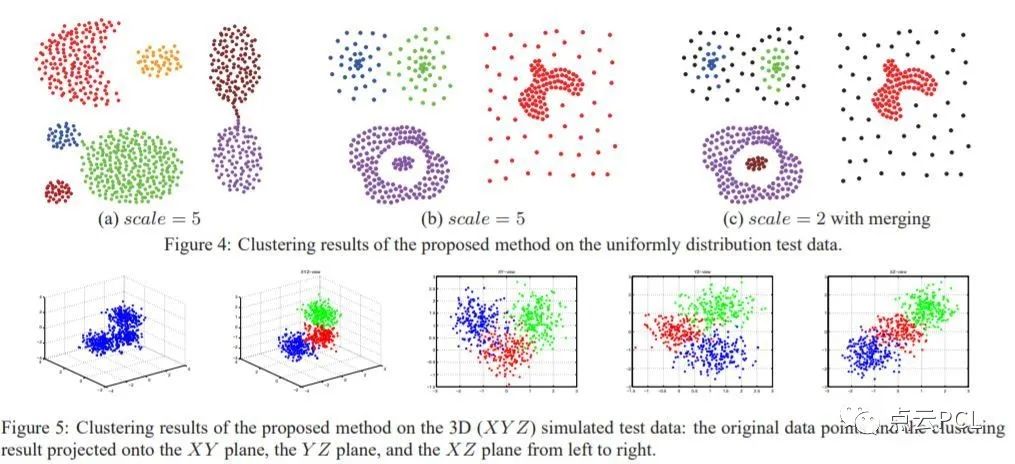
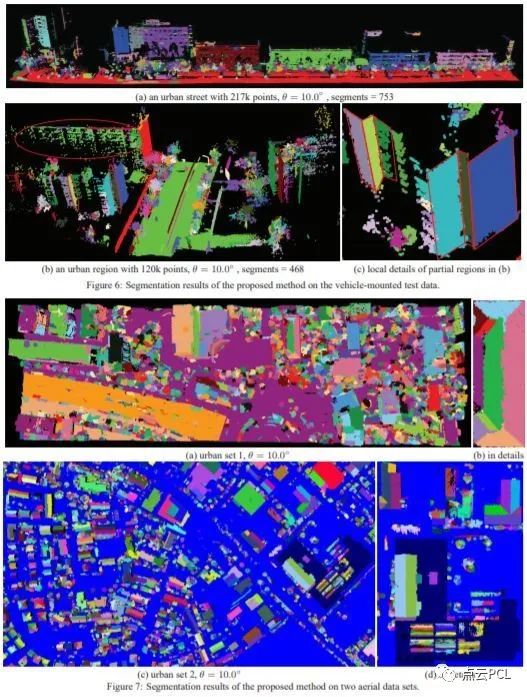
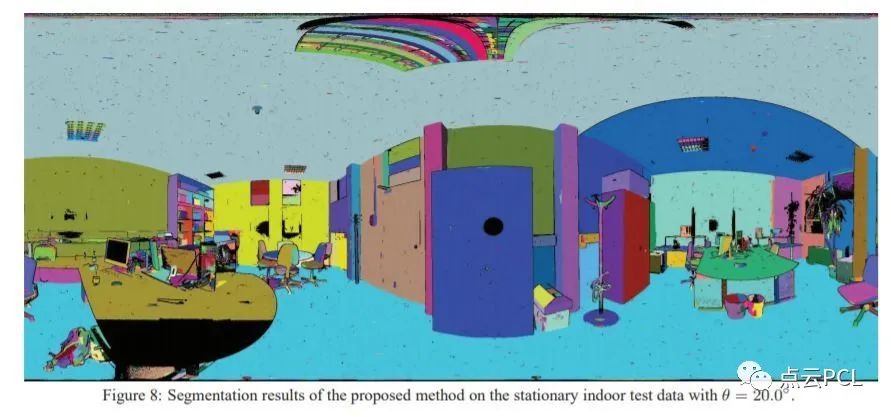
这篇文章中,我们首次提出一种新颖的分层聚类算法----pairwise Linkage(p-linkage),能够用来聚类任意维度的数据,然后高效的应用于3D非结构点云的分类中,P-linkage 聚类算法首先计算每个点的特征值,例如计算2D点的密度和3D点的平滑度,然后使用更为具有特征性的数值来描述每个点与其最邻近点的链接关系,初始的聚类能够通过点对的链接更容易的进行,然后,聚类融合过程获得最终优化聚类结果,聚类结果能够用于其他的应用中,基于P-Linkage聚类,我们在3D无结构点云中发明了一个高效的分割算法,其中使用点的平滑度作为特征值,对于每一个初始的聚类创立切片,然后新颖且鲁棒的切片融合方法来获得最终的分割结果,所提的P-linkage聚类和3D点云分割方法仅需要一个输入参数。实验结果在2d-4d不同的维度合成数据充分证明该P-Linkage聚类的效率和鲁棒性,大量的实验结果在车载,机载和站式激光点云证明我们提出所提方法的鲁棒性。
https://github.com/xiaohulugo/PointCloudSegmentation
●论文图集

●英文摘要
In this paper, we first present a novel hierarchical clustering algorithm named Pairwise Linkage (P-Linkage), which can be used forclustering any dimensional data, and then effectively apply it on 3D unstructured point cloud segmentation. The P-Linkage clusteringalgorithm first calculates a feature value for each data point, for example, the density for 2D data points and the flatness for 3D pointclouds. Then for each data point a pairwise linkage is created between itself and its closest neighboring point with a greater featurevalue than its own. The initial clusters can further be discovered by searching along the linkages in a simple way. After that, a clustermerging procedure is applied to obtain the finally refined clustering result, which can be designed for specialized applications. Based onthe P-Linkage clustering, we develop an efficient segmentation algorithm for 3D unstructured point clouds, in which the flatness of theestimated surface of a 3D point is used as its feature value. For each initial cluster a slice is created, then a novel and robust slice mergingmethod is proposed to get the final segmentation result. The proposed P-Linkage clustering and 3D point cloud segmentation algorithmsrequire only one input parameter in advance. Experimental results on different dimensional synthetic data from 2D to 4D sufficientlydemonstrate the efficiency and robustness of the proposed P-Linkage clustering algorithm and a large amount of experimental resultson the Vehicle-Mounted, Aerial and Stationary Laser Scanner point clouds illustrate the robustness and efficiency of our proposed 3Dpoint cloud segmentation algorithm.
如果你对本文感兴趣,请点击“原文阅读”获取知识星球二维码,务必按照“姓名+学校/公司+研究方向”备注加入免费知识星球,免费下载pdf文档,和更多热爱分享的小伙伴一起交流吧!
扫描二维码
让我们一起分享一起学习吧!期待有想法,乐于分享的小伙伴加入免费星球注入爱分享的新鲜活力。分享的主题包含但不限于三维视觉,点云,高精地图,自动驾驶,以及机器人等相关的领域。
以上是关于点云论文速读点云分层聚类算法的主要内容,如果未能解决你的问题,请参考以下文章