3D,点云分割,不要割个寂寞
Posted J-A
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了3D,点云分割,不要割个寂寞相关的知识,希望对你有一定的参考价值。
点云分割的目的是分块,便于后续的单独处理。一般做法是根据空间、几何和纹理等特征信息进行划分,使同一划分内的点云具有相同或相似的特征。
目前,点云分割有2条路径可选:
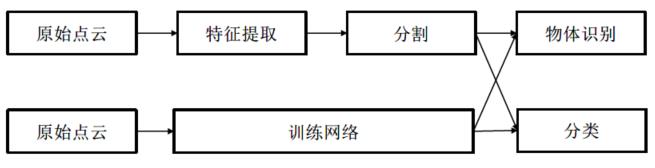
即经典的分割方法和基于深度学习的分割方法。
首先,我们看一下有哪些经典的分割方法:
- 随机采样一致性算法,大名鼎鼎的RANSAC
- 欧式聚类分割算法
- 条件欧式聚类分割
- 基于区域生长的分割
- 基于颜色的区域生长分割
- 最小图割的分割
- 基于法线微分的分割
- 基于超体素的分割
除了RANSAC是基于概率的分割,其余几种都是基于聚类的分割。这里我们重点介绍下3种分割方法:
1、RANSAC
该算法核心思想是随机性和假设性。随机性是根据正确数据出现的概率去随机选取抽样数据;假设性是假设选出的抽样数据都是正确数据,然后用这些正确数据通过问题满足的模型,去计算其它点,然后对这次结果进行一个评分。
以上是关于3D,点云分割,不要割个寂寞的主要内容,如果未能解决你的问题,请参考以下文章