ESPcopter无人机源码分析.1
Posted 云深之无迹
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ESPcopter无人机源码分析.1相关的知识,希望对你有一定的参考价值。
这篇文章就开始对无人机的源码开始分析了,对飞机的具体说明在上了链接~
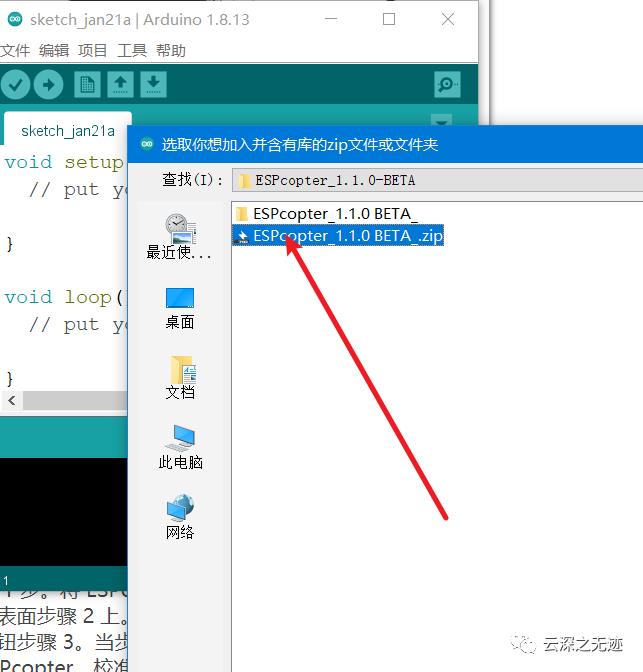
按说这个库是可以记载在Arduino的,但是失败了
http://espcopter.com/code-release/改了名字也加载不了
今天看这个源码
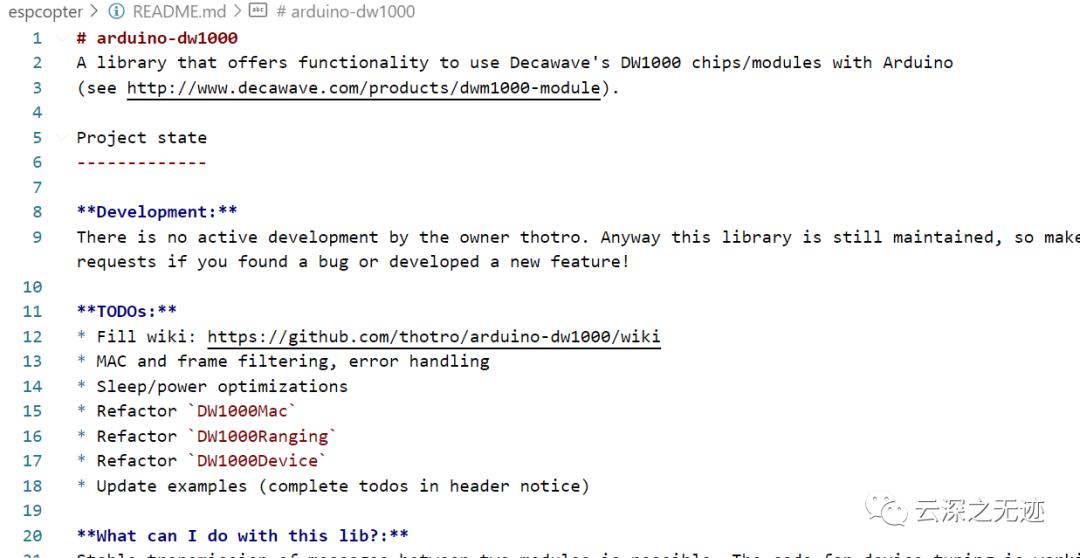
readme没有对自己的项目做描述,而是在讲述昨天说的定位模块
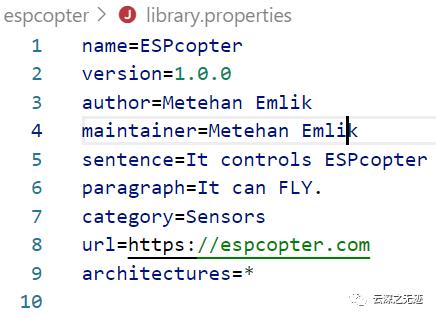
标准的格式,最重要的是name,version
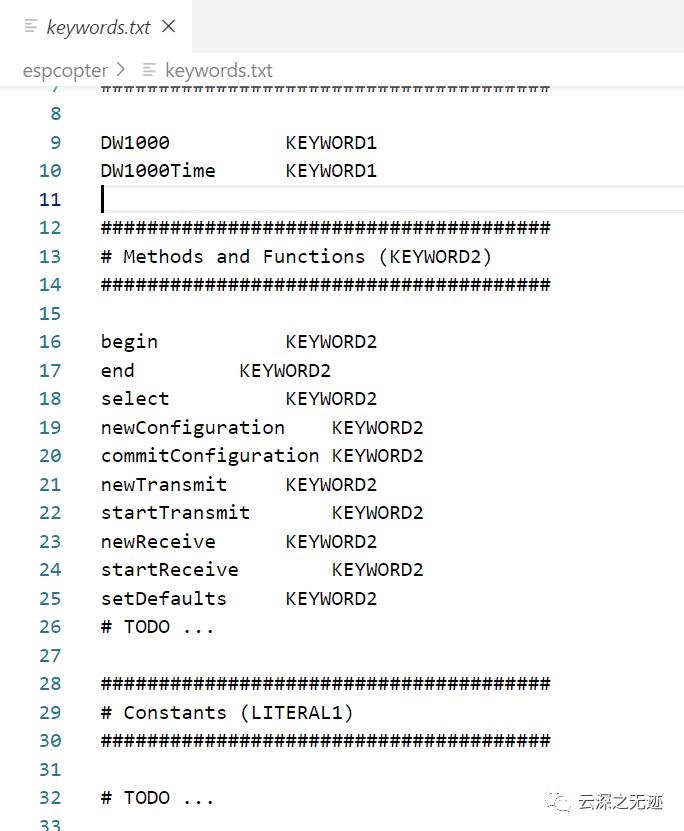
关键字,这个东西被加载到arduino以后。关键字的颜色是高亮的
分为源码以及demo,我们先看demo。然后实现看源码
基础的这是LED小灯
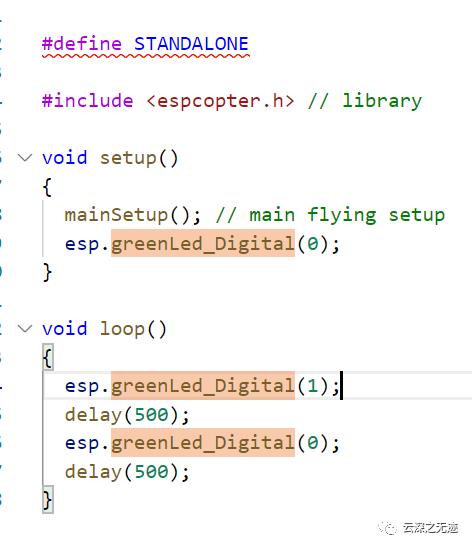
配置+loop
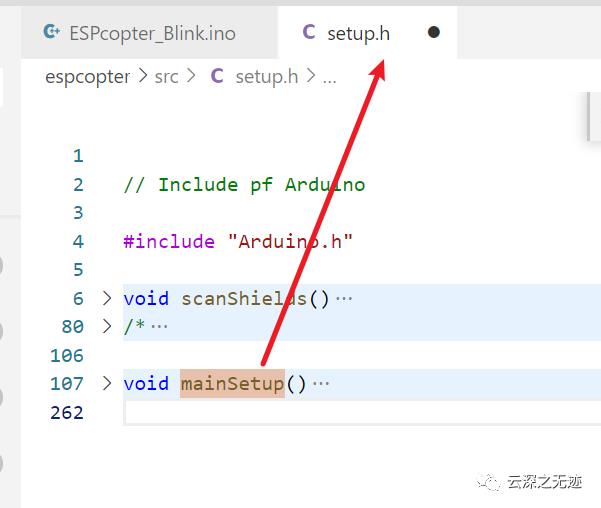
这个函数在所有的ino内,被首先调用。足以见其的重要性
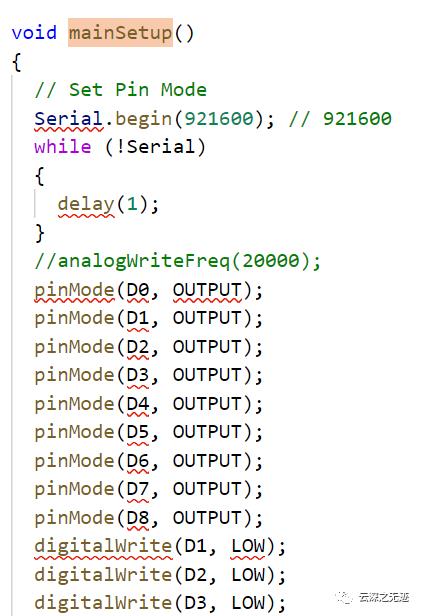
前面这些code在我昨天的文章里面已经有详细的分析了
PWM,英文名Pulse Width Modulation,是脉冲宽度调制缩写,它是通过对一系列脉冲的宽度进行调制,等效出所需要的波形(包含形状以及幅值),对模拟信号电平进行数字编码,也就是说通过调节占空比的变化来调节信号、能量等的变化,占空比就是指在一个周期内,信号处于高电平的时间占据整个信号周期的百分比,例如方波的占空比就是50%.PWM用途很广,像一些步进电机、舵机等等都需要用到。

看样子是用循环对PWM的引脚初始化
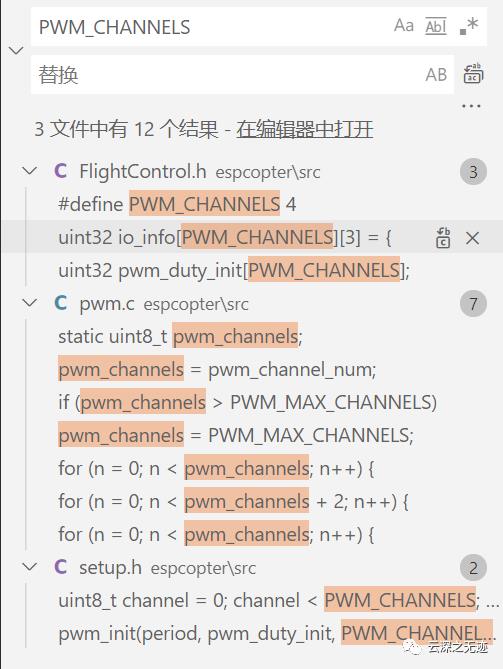
搜索
4个螺旋桨
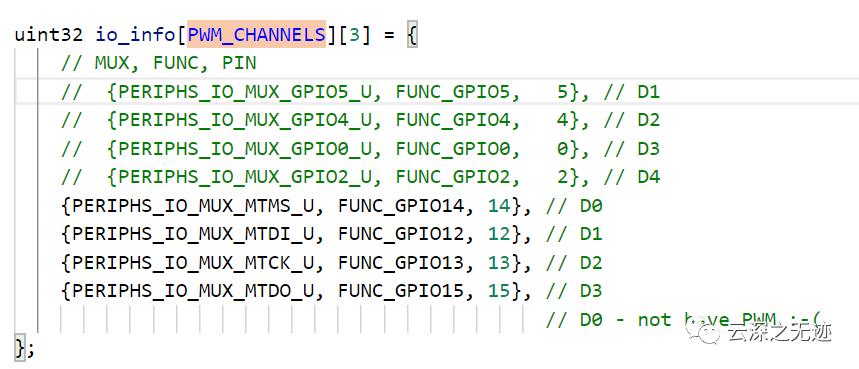
自定义PWM通道

名称:pwm_init含义:PWM 初始化示例:pwm_init(uint32 freq, uint32 *duty, uint32 pwm_channel_num, uint32 (*pin_info_list)[3]);描述:PWM GPIO, 参数和定时器初始化参数:uint32 freq: PWM 的周期uint32 *duty: 各通道占空比参数uint32 pwm_channel_num: PWM 通道数。uint32 (*pin_info_list)[3]: PWM 各通道的 GPIO 硬件参数,该参数是一个 n*3 的数组指针。数组中定义了 GPIO 的寄存器,对应 PIN 脚的 IO 复用值,和 GPIO 对应的序号。例如:初始化一个 3 通道的 PWM。uint32 io_info[][3] ={{PWM_0_OUT_IO_MUX, PWM_0_OUT_IO_FUNC, PWM_0_OUT_IO_NUM},{PWM_1_OUT_IO_MUX, PWM_1_OUT_IO_FUNC, PWM_1_OUT_IO_NUM},{PWM_2_OUT_IO_MUX, PWM_2_OUT_IO_FUNC, PWM_2_OUT_IO_NUM}};pwm_init(light_param.pwm_period, light_param.pwm_duty, 2, io_info);调用:系统初始化时调用。目前只能调用一次。返回值:无
到现在完成了引脚的PWM初始化

PWM的频率
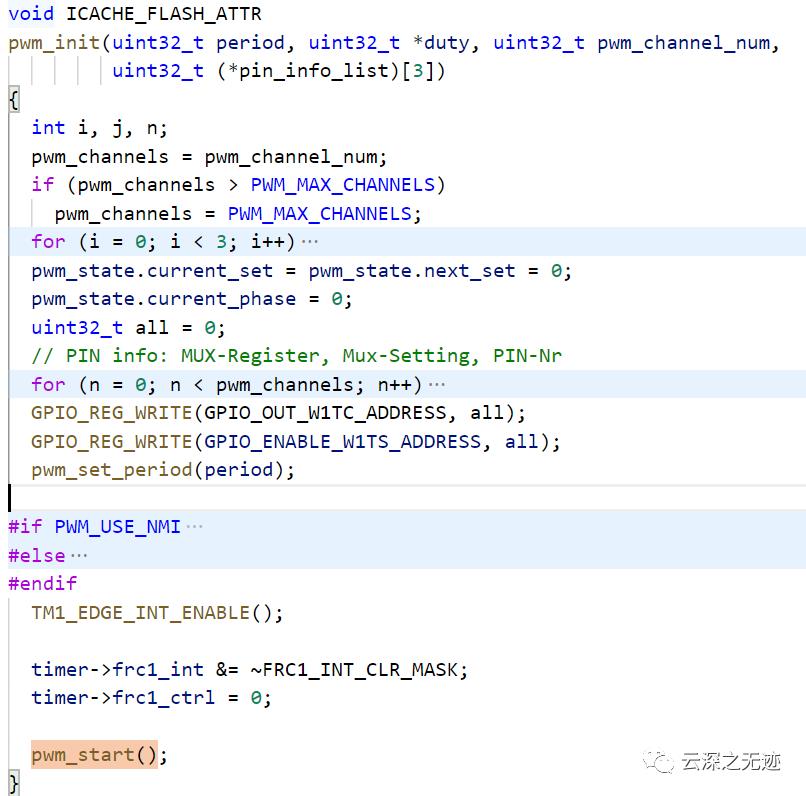
对于PWM的初始化以外,就是pwm的启动了。以上代码就是pwm的启动
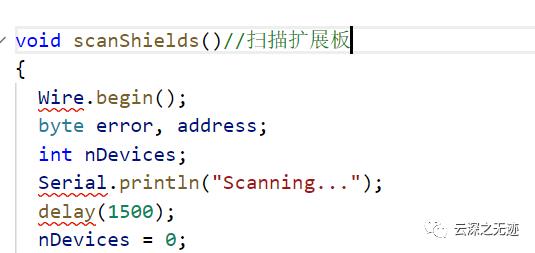
先总线初始化,然后定义两个比特变量
设备数初始化为0,然后打印开始打印
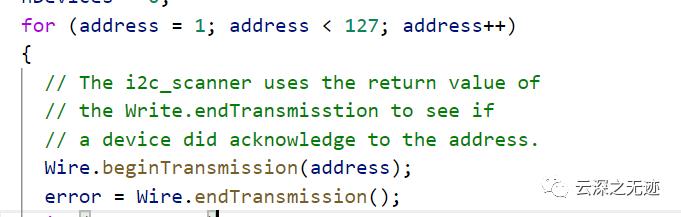
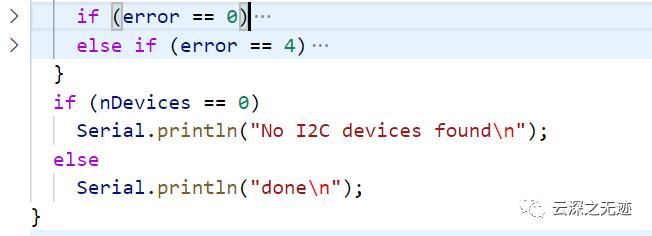
下面对返回值进行判断
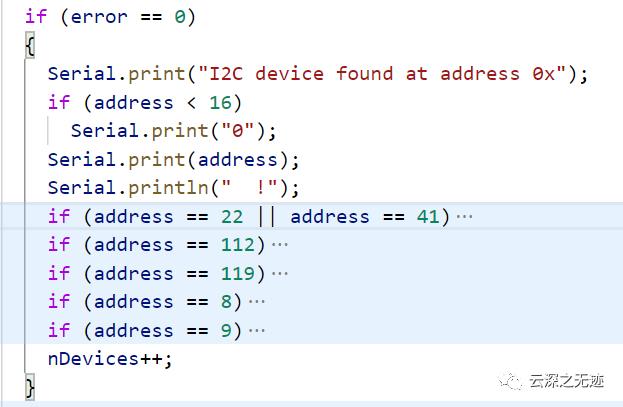
error为0的时候先打印0x处未发现设备,address小于16,打印0 addres !
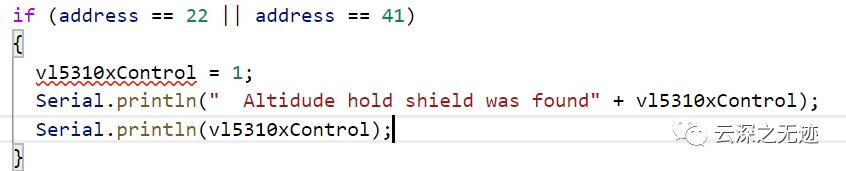
22和41是激光传感器

122是多重环状激光避障传感器

查了一下这个

8是光流传感器
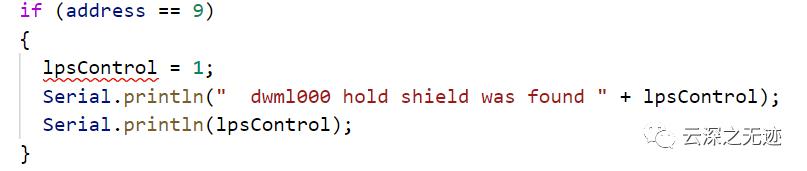
9是短波
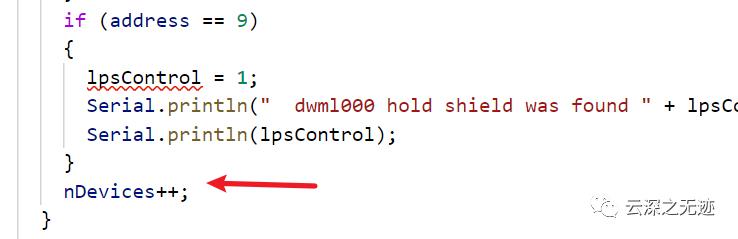
注意这里会对发现的传感器进行计数
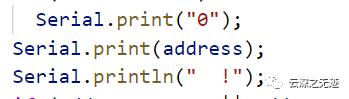
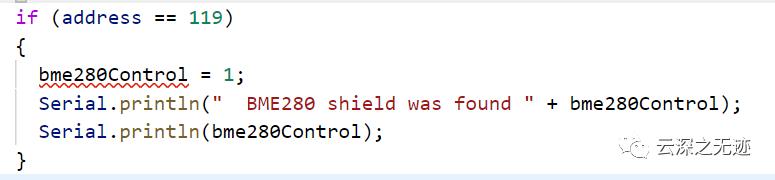
用这个语句打印
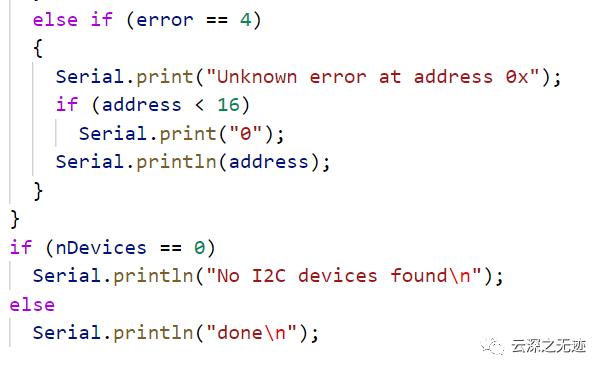
以及没有找到这些扩展传感器,打印没有找到
此时我们的代码读到一半了
此时让我们回顾一下,我们现在学到的东西。首先就是开启了调试用的串口,初始化了所有的引脚,以及明确了引脚的状态。接着就是初始化了4个PWM的引脚,而且让4个PWM的引脚成为可以使用的就绪态。接着让记载的灯亮起。EEPROM一开始申请512字节。以及一个函数去扫描(为了注册传感器)的一个函数,而且都是I2C的通信的传感器。
以下插一些相关的资料:
https://www.cnblogs.com/liming19680104/p/11176481.htmlEEPROM(Electrically Erasable Programmable Read-Only Memory),电可擦可编程只读存储器——一种掉电后数据不丢失的存储芯片。
EEPROM可以在不使用文件和文件系统的情况下用来固化一些数据,常见的比如用来保存SSID或者Password,保存用户设置等数据,这样就可以不用每次都通过烧写程序来改变系统运行时的初始值。
Arduino提供了完善的eeprom库,不过需要注意的是ESP8266没有硬件EEPROM,使用的是flash模拟的EEPROM
EEPROM库在Arduino中经常用于存储设定数据。当然基于Arduino的ESP8266也不例外。但是,和真正的Arduino板子不一样的是,ESP8266采用的方式是将flash中某一块4K的存储模拟成EEPROM。至于为什么是4K呢?主要原因是flash是以sector为一个单位,1 sector等于4096Bytes(4KB),操作flash时是以sector为一个整体来操作
读取操作是通过ESP8266 SDK提供的API将flash中的内容读取到Buffer中是没有限制一次就要将4K全读完,Buffer的大小由EEPROM.begin(size)决定,但是由于Buffer大小会占用内存RAM,所以务必按照实际需要来定义大小
和标准的EEPROM库不一样的是,你需要在读或者写操作之前先通过 EEPROM.begin(size) 来声明你需要操作的存储大小,size取值范围为4~4096字节
EEPROM.write() 不会立刻把内容写进flash,如果你希望保持到flash去,那么你必须调用 EEPROM.commit()。当然,EEPROM.end() 不仅也能完成commit,同时会释放申请的eeprom ram资源
EEPROM库非常简单:
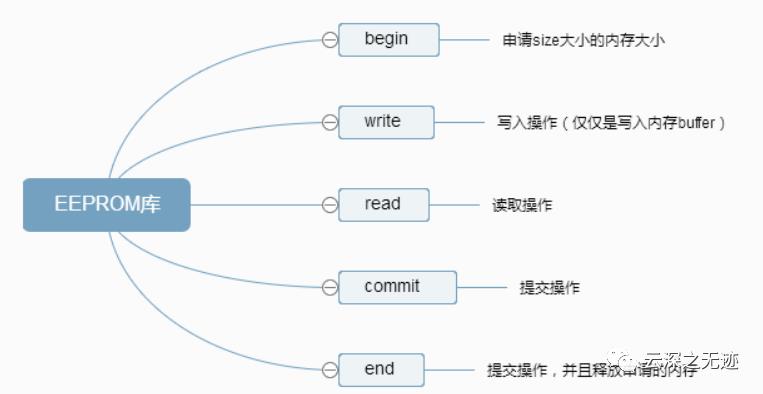
函数:begin(size) 该功能用于申请具体大小的ram内存空间并从flash中读取相应数据到内存
size:要申请的内存大小(size取值范围为4~4096字节)
返回值:无
注意点:size必须大于0
虽然我们可以输入自定义size,但是最终会经过计算得到真正的size(4的倍数),并申请对应的内存空间
函数:write(address,value) 该功能用于往内存空间写入数据
val:写入的数据。
返回值:无
注意点:写入的数据只是写入到申请的内存空间,并不是立刻写入到flash中
EEPROM其实是从外部flash中存储器最末尾开辟的4096字节空间
【write只写一个字节的数据,所以数据的值应该在0~255之间,超过255的数据写入就不正确了】
函数:read(address) 该功能用于读取数据操作
返回值:返回存储数据
注意点:读取的数据也是从begin中生成的内存空间中去获取,并不会直接操作flash
【read只读一个字节的数据】
函数:commit() 该功能用于把内存空间的数据覆盖到flash eeprom块去
参数:无;
返回值:返回bool值,表示是否覆盖成功;
注意点:这个方法才是真正的把数据从内存控件写回到flash空间;
而且,写回flash之前会把整一块sector全部擦除掉,也就意味着就算我们begin(1)最终也是会擦除4096字节空间。但是size的大小决定了内存空间的剩余量以及回写的快慢,所以根据具体情况来设置size
函数:end() 该功能用于写入flash,并且释放内存空间
参数:无
返回值:无
注意点:end包含了写入flash,并且回收内存空间
建议读者操作完EEPROM之后,必须调用这个方法,回收内存空间很重要
//功能描述:该代码向EEPROM写入100字节数据int addr = 0; //EEPROM数据地址void setup() {Serial.begin(115200);Serial.println("");Serial.println("开始写write");EEPROM.begin(100);//申请内存并读取flash中相应的数据到内存for(addr = 0; addr<100; addr++){int data = addr;EEPROM.write(addr, data); //写数据}EEPROM.end(); //把数据写入flash,并释放内存Serial.println("结束write");}void loop() {}
int addr = 0; //EEPROM数据地址void setup() {Serial.begin(115200);Serial.println("");Serial.println("开始读数据");EEPROM.begin(100);//申请100内存空间for(addr = 0; addr<100; addr++){int data = EEPROM.read(addr); //从内存中读取一个字节数据Serial.println(data);delay(2);}EEPROM.end();}void loop() {}
以上再给出读写的demo~
接着又是一个初始化的工作
这个初始化的工作与飞机的姿态运算有关,是个大的主题放在接下来的飞行控制的篇目里面了~大家关注,点赞加在看哦~
以上是关于ESPcopter无人机源码分析.1的主要内容,如果未能解决你的问题,请参考以下文章
Android 逆向整体加固脱壳 ( DEX 优化流程分析 | DexPrepare.cpp 中 dvmOptimizeDexFile() 方法分析 | /bin/dexopt 源码分析 )(代码片段
Android 事件分发事件分发源码分析 ( Activity 中各层级的事件传递 | Activity -> PhoneWindow -> DecorView -> ViewGroup )(代码片段