开源飞控初探ArduPilot::Copter固件源码分析
Posted hursing
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了开源飞控初探ArduPilot::Copter固件源码分析相关的知识,希望对你有一定的参考价值。
2022.5.7,基于v4.0.5的分析。官网文档没及时更新,本文对当前版本源码的描述可能和官网不一样。
1、无人机全栈分层结构图
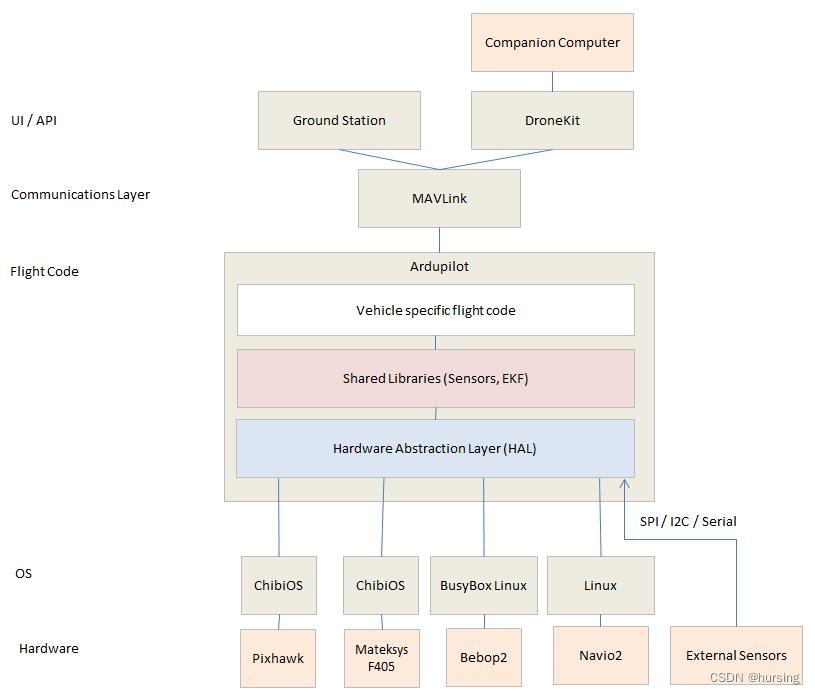
2、Flight Code固件部分
上图中的Flight Code层,分为5个部分:
车机层。一份代码通过编译配置,可以支持Rover(小车/船)、Copter(直升机,包括多旋翼)、Plane(固定翼飞机)、Sub(潜水器)、AntennaTracker(追踪天线,会自动跟随无人机所在方向转动的雷达)这些子项目。车机层是这几种车机子项目的专属代码层。
通用组件库。各种车机都依赖的基础层,见源码结构小节的libraries/。
硬件抽象层HAL。
工具。包括自动化测试等,见源码结构一节的Tools/。
依赖的三方项目,以git submodule形式存在。见源码结构小节modules/。
车机层实际支持的vehicle类型:

3、ArduCopter架构与顶层设计
ArduCopter就是ArduPilot:Copter子项目的简称。整体架构图:
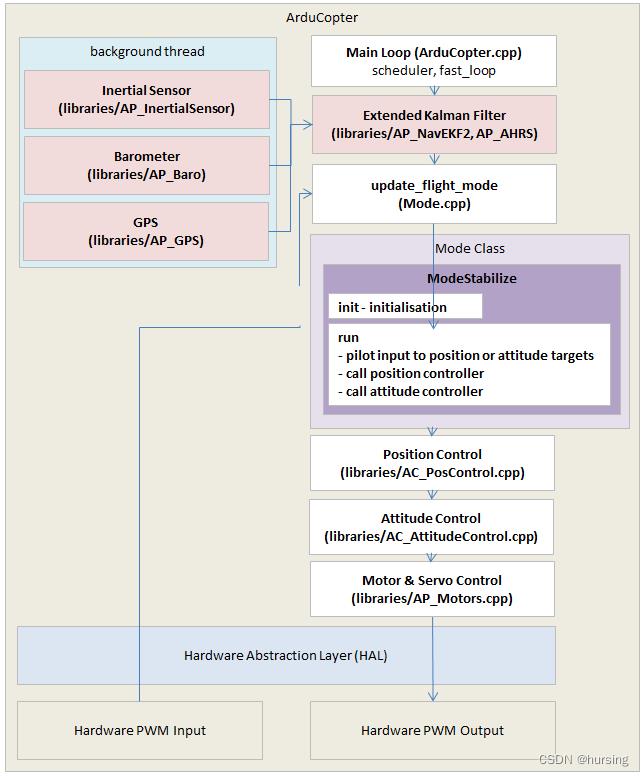
理解了顶层设计思路就行了:
每种板子都有自己的BootLoader bin文件,不需要再编译的,直接打包进最终bin。它是HAL硬件抽象层的实现。
main函数是往HAL实现层注册一个callback函数,然后HAL::run()把控制权交给了BootLoader层。硬件初始化完毕会调用callback函数,其中一个是setup(),让车机层接着初始化。
每种车机子项目都有自己的主类,都继承AP_Vehicle父类,它是HAL层回调函数的实体,例如Copter子项目有个Copter类。Copter::setup()会发起很多个计划任务,不同任务做不同的事,触发频率也不一样(1~400Hz都有)。这些任务有三大类:
读取不同传感器的数据,处理后保存计算结果。这些结果能表示车机的当前状态。
执行地面站的各种命令,命令最终会转化为车机的目标状态
根据当前状态和目标状态的差距,计算应该如何通过调整不同电机的功率输出(螺旋桨转速)以达到目标状态,并把计算结果转换为电路控制信号。
飞行模式抽象为一个基类Mode,每种具体的飞行模式是一个子类。不同的子类,计算车机目标状态的结果会不一样。即设计模式中的策略模式。Copter类有成员变量记录当前的Mode。
Mission(航线规划)item都可以用一种Mode来表示,item参数影响的是计算目标状态的结果。
用伪代码来描述核心流程:
while True:
receiveMavLinkControlMessage()
changeTarget()
readSensorValue()
convertValueToStandardUnit()
saveInMemory()
computeWayToTarget()
computeAttitudeForMoving()
computeMotorRate()
computeElectricCurrentValue()
passValueToMotor()4、源码目录文件结构和用途
AntennaTracker/。追踪天线子项目的专属代码
APMrover2/。rover子项目的专属代码
ArduCopter/。直升机子项目的专属代码(多旋翼也是直升机,可以垂直起降的都算)
ArduPlane/。固定翼飞机子项目的专属代码(需要助跑的就不是直升机了)
ArduSub/。潜水器子项目的专属代码
benchmarks/AP_gbenchmark.h。只有两个inline函数,结合Google Benchmark使用的。
docs/。使用doxygen(文档生成工具)来生成文档的脚本和配置。
libraries/。有116个子目录。重要的模块包括:
AC_AttitudeControl/。ArduCopter的姿态、位置控制函数库
AC_PID/。比例-积分-微分控制
AP_AHRS/。姿态估算,使用DCM或EKF算法
AP_Camera/。摄像头控制
AP_InertialNav/。惯性导航处理,混合计算加速计的输入,包括GPS和气压计数据
AP_InertialSensor/。读取陀螺仪、加速计数据,校准和转换成标准单位,供其它模块使用
AP_Math/。各种数学函数,包括向量操作。
AP_Mission/。存储和读取eeprom上的mission命令
AP_Motors/。电机混合计算
AP_OpticalFlow/。光流传感器
AP_RangeFinder/。声呐和远距离传感器
AR_WPNav/。waypoint navigation,航点导航
RC_Channel/。转换APM_RC到内部单元的电平输入输出,例如角度
mk/check_modules.sh。检查子仓库有没有clone和checkout成功
modules/。子目录都是git submodule仓库,是ArduPilot保存的副本
Chibios/。一个实时操作系统,官网http://www.chibios.org/。ArduPilot基于它来开发。以前用的是NuttX系统。
gbenchmark/。google的性能测试工具。
gtest/。google的C++测试框架
libcanard/。一个uavcan/can协议的c语言实现
mavlink/。通信协议,见下一章
uavcan/。无人机控制器域网。
waf/。编译工具
tests/。应用gtest的代码
Tools/。有26个子目录,用途包括:BootLoader、外设管理、waf编译、自动化测试、代码风格检查、调试、环境依赖安装、日志分析、mavproxy等
BUILD.md。描述了编译各个子项目的命令和参数
README.md。主要是参考资料的网址和维护者的名单。
5、源码编译
环境为WSL - Ubuntu 20.04.4 LTS。
需要先安装python2,并确保python --version和pip --version都显示2.x版本。
# 先clone主仓库
git clone https://github.com/ArduPilot/ardupilot.git主仓库的submodule地址写了git://协议,在国内是访问不了,需要手动修改为https://。方法:
打开.gitmodules和.git/config,把所有的git://改成https://。
MAVLink还有一个submodule,pymavlink。所以要打开modules/mavlink/.gitmodules和.git/modules/modules/mavlink/config,把所有的git://改成https://。
修改完后再clone子仓库
git submodule update --init --recursiveArduPilot带有一个脚本来安装环境依赖项,但是基于Ubuntu18的,在Ubuntu20需要修改脚本,因为Ubuntu20废弃了python2的包,无法用apt安装,可以改用pip安装。文本编辑器打开Tools/environment_install/install-prereqs-ubuntu.sh,可全局搜索删除这些包名python-pip python-matplotlib python-scipy python-empy python-serial python-opencv
使用自带脚本安装依赖:
pip install matplotlib scipy empy serial opencv-python==4.2.0.32
./Tools/environment_install/install-prereqs-ubuntu.sh -y
# 过程需要sudo权限,输入密码ArduPilot使用waf编译工具来组织编译过程。waf的作用类似于android系统的编译工具ninja。
./waf list_boards命令可以列出支持的板子,现在支持的有:
aero airbotf4 bbbmini bebop bhat blue crazyflie2 CUAV-Nora CUAV-X7 CUAV_GPS CUAVv5 CUAVv5Nano CubeBlack CubeBlack+ CubeGreen-solo CubeOrange CubePurple CubeSolo CubeYellow dark disco DrotekP3Pro Durandal edge erleboard erlebrain2 f103-ADSB f103-GPS f103-HWESC f103-periph f103-RangeFinder f103-Trigger f303-GPS f303-HWESC f303-M10025 f303-M10070 f303-periph f303-Universal F35Lightning F4BY fmuv2 fmuv3 fmuv4 fmuv4-beta fmuv5 iomcu KakuteF4 KakuteF7 KakuteF7Mini linux luminousbee4 MatekF405 MatekF405-STD MatekF405-Wing MatekF765-Wing MatekH743 mindpx-v2 mini-pix mRoControlZeroF7 mRoNexus mRoPixracerPro mRoX21 mRoX21-777 navio navio2 NucleoH743 ocpoc_zynq omnibusf4 omnibusf4pro omnibusf4v6 OMNIBUSF7V2 OmnibusNanoV6 PH4-mini Pix32v5 Pixhawk1 Pixhawk1-1M Pixhawk4 Pixracer pocket pxf pxfmini R9Pilot revo-mini rst_zynq sitl SITL_arm_linux_gnueabihf SITL_static SITL_x86_64_linux_gnu skyviper-f412-rev1 skyviper-journey skyviper-v2450 sparky2 speedybeef4 SuccexF4 TBS-Colibri-F7 VRBrain-v51 VRBrain-v52 VRBrain-v54 VRCore-v10 VRUBrain-v51 ZubaxGNSS zynq这里选Pixhawk4。
# 先配置板子
./waf configure --board Pixhawk4
# 编译copter子项目
./waf -j8 --targets bin/arducopter编译过程中,编译ChibiOS有103个步骤,ArduPilot本身有648个步骤,处理4个XML包含226种消息MAVLink。最终得到一个bin文件,要烧录到飞控板子上。
6、仿真
源码里有工具使得在PC机上运行固件,本机可通过tcp 5760端口连接并用MAVLink交互。
参考资料
以上是关于开源飞控初探ArduPilot::Copter固件源码分析的主要内容,如果未能解决你的问题,请参考以下文章