STM32CubeMX与串口通信
Posted LinZJ0423
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了STM32CubeMX与串口通信相关的知识,希望对你有一定的参考价值。
一、软件的安装
由于软件是用JAVA编写,需要提前使用JDK环境
STM32CubeMX官网链接:https://www.st.com/en/development-tools/stm32cubemx.html#get-software
进入后如图所示:
拉到网页底下:
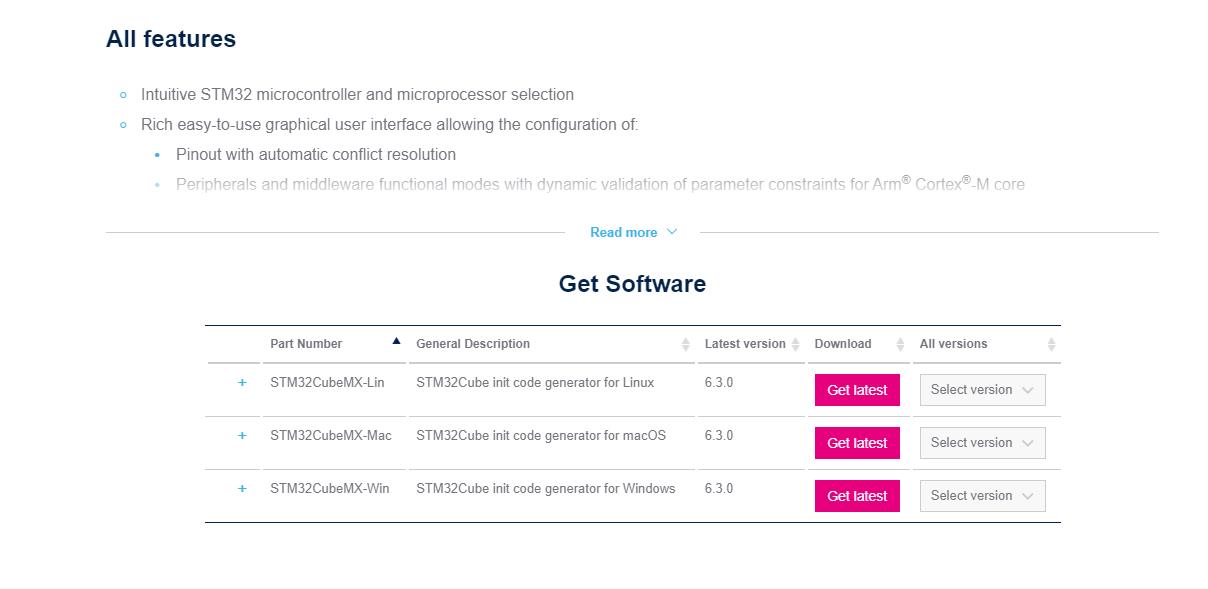
根据不同的操作系统来选择不同后缀的安装下载方式,如果是Linux系统选择Lin,Mac OS选择Mac,Windows系统选择Win,之后会让你输入邮箱,输入邮箱后你的邮件中含有下载链接!!!
下载完成后
勾选第一个选项安装 ,而后NEXT就可以完成任务,关于安装的参考链接:https://blog.csdn.net/qq_43279579/article/details/112213196
二、初识STM32CubeMX
完成上述安装后,进入软件看看如何使用,文中使用的是6.3,0版本,操作系统为Windows
2.1 安装库
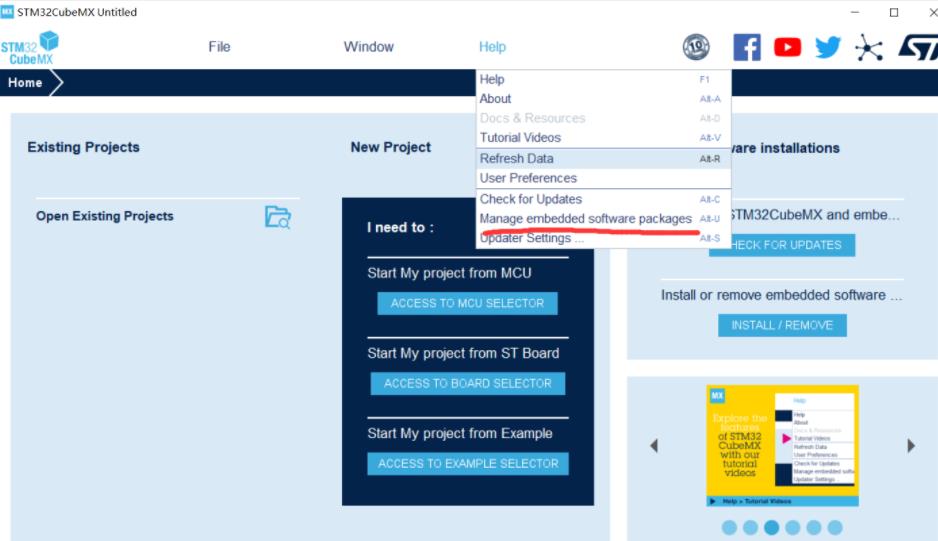
打开软件后 如图选择
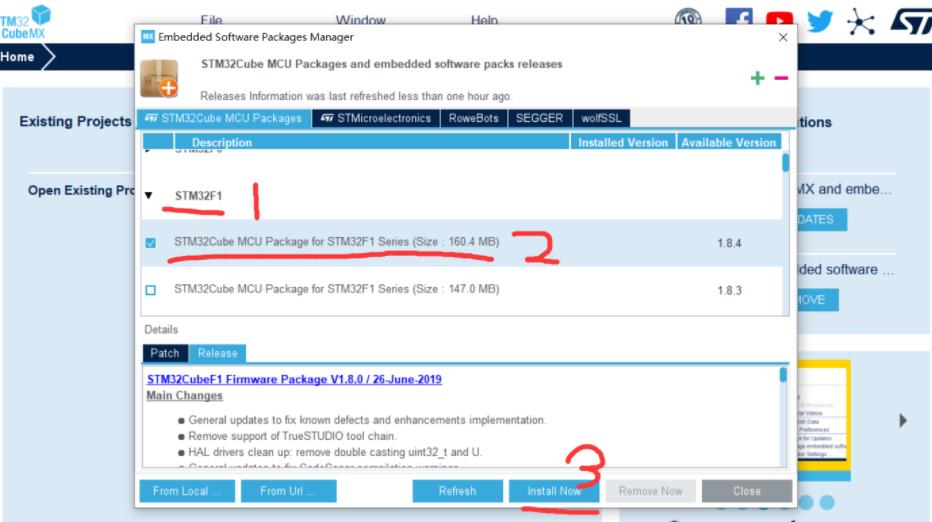
根据自己不同的芯片系列来选择,我所使用的是STM32F1系列的
2.2项目的创建

点击New Project创建项目
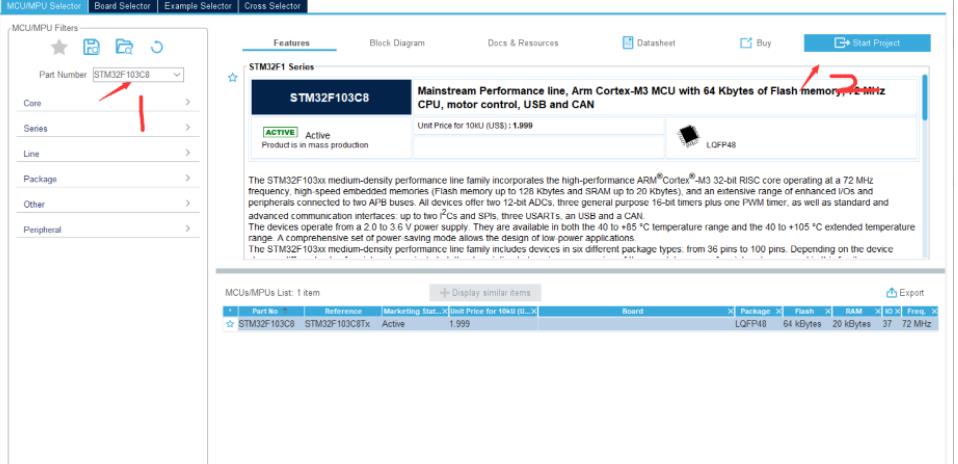
选择STM32F103C8芯片
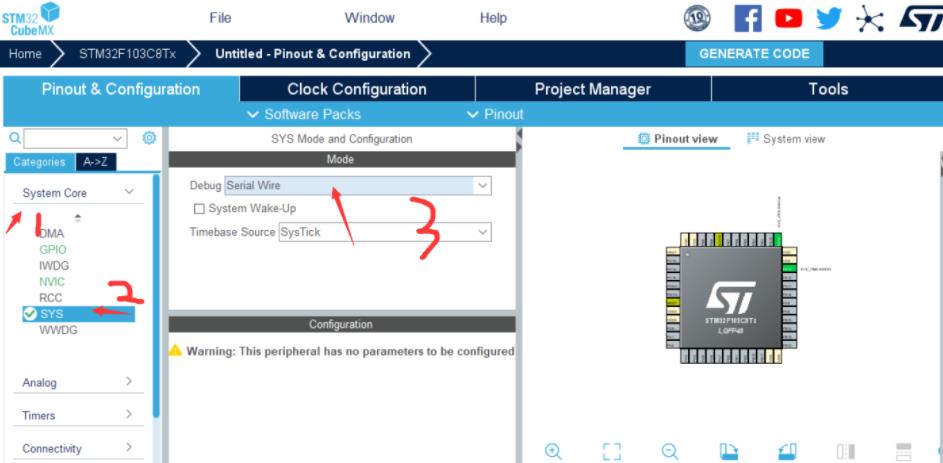
选择system core下的sys ,将debug设置为serial wire
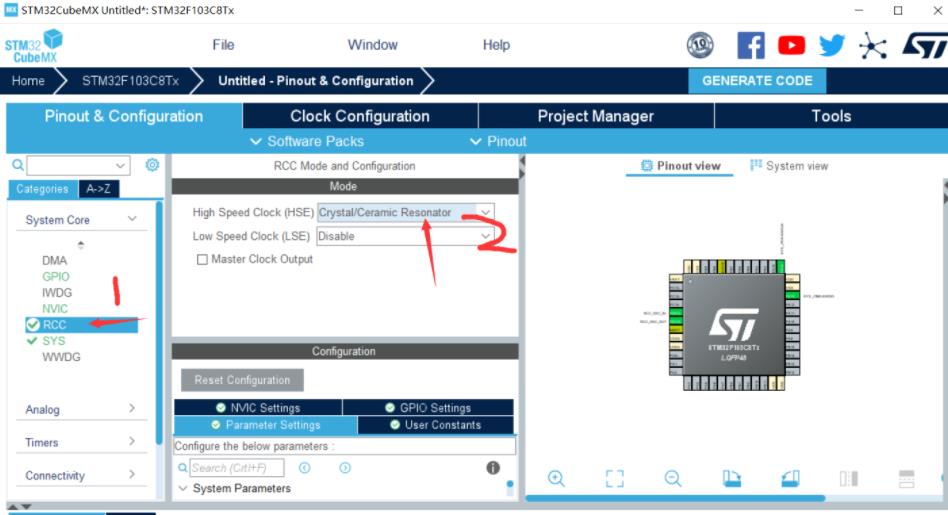
选择RCC,将High Speed Clock 设置为 Crystal/Ceramic Resonator
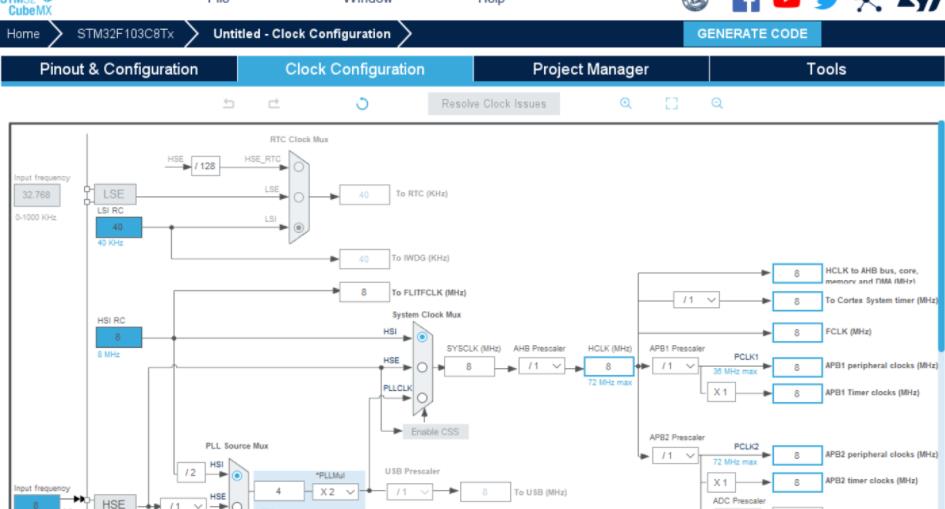
选择Clock Configuration
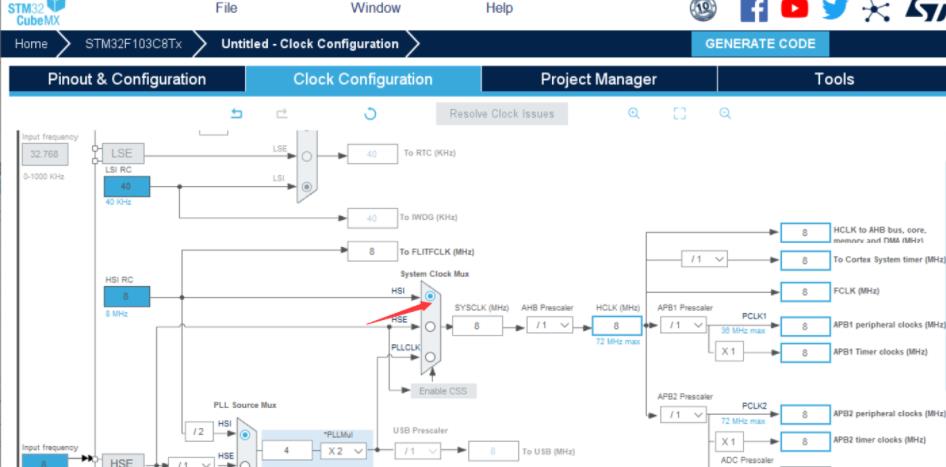
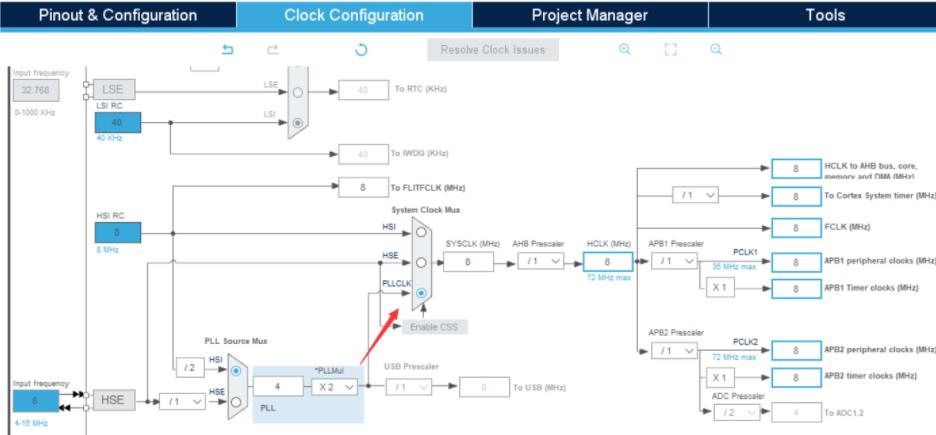
更改图中的两个不同的电路
2.3配置GPIO
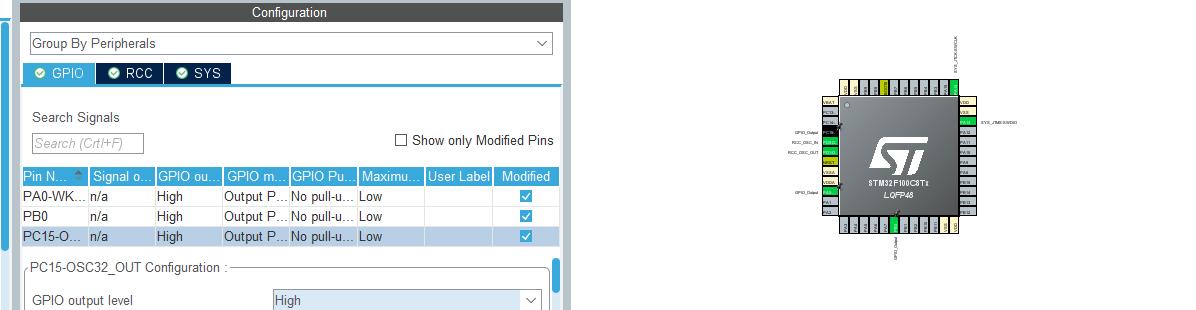
选择GPIO,一次将B0、C15、A0设置为GPIO_Output
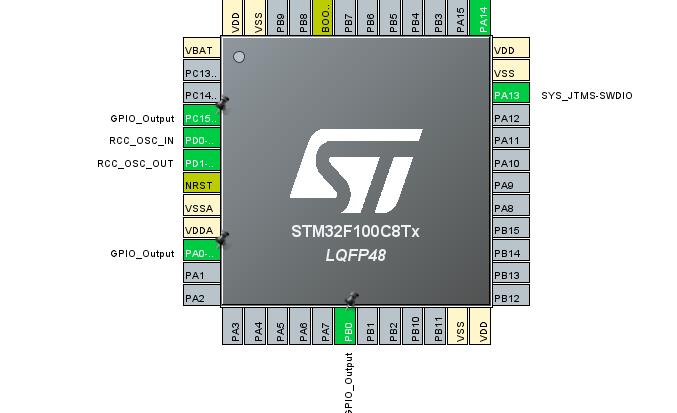
将三个引脚的输出默认改为High(改完之后会出现三个√)
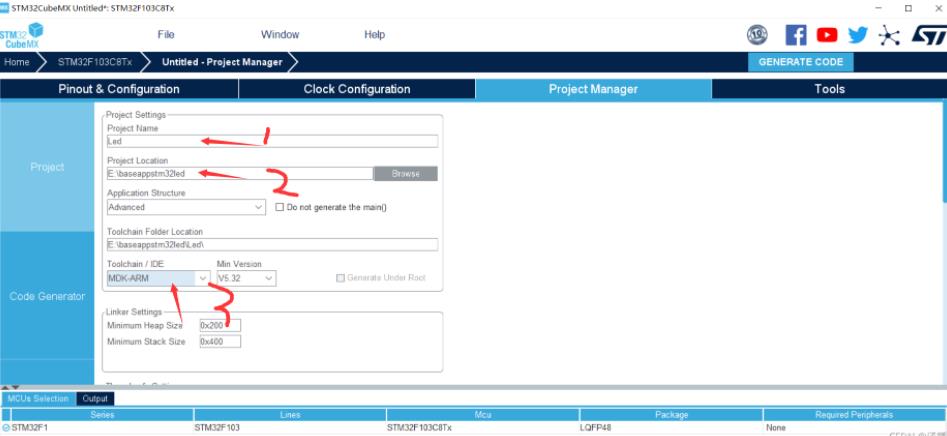
在1 2 3处分别选择一些你的项目信息,如1处为名称 2为保存的位置,同时在project Manager下的Project中设置工程名称和工程路径,并且选择编译软件,由于我们使用Kei5,选择MDK-ARM。
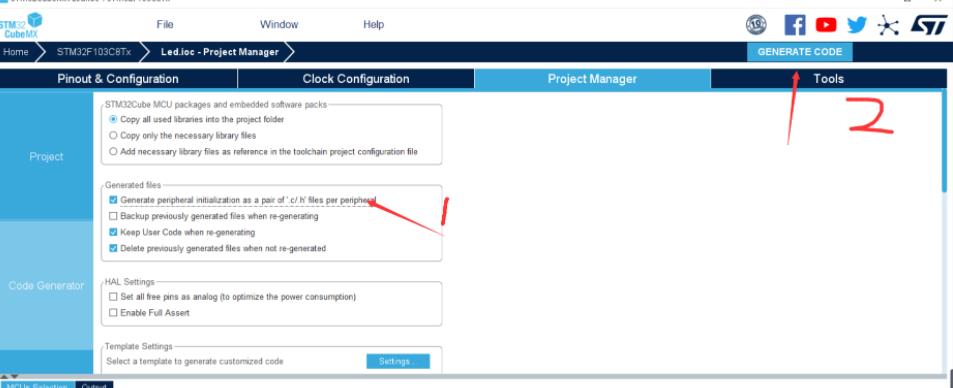
在Code Generate中选择第一个,然后Generate Code
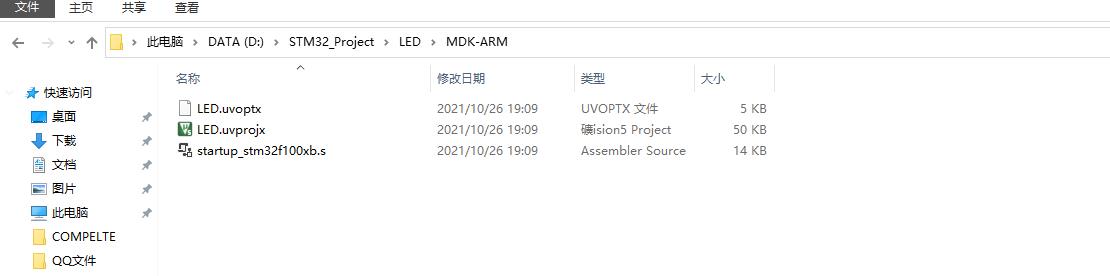
可以在所创建的目录下,找到我们生成的文件,然后用keil5打开。
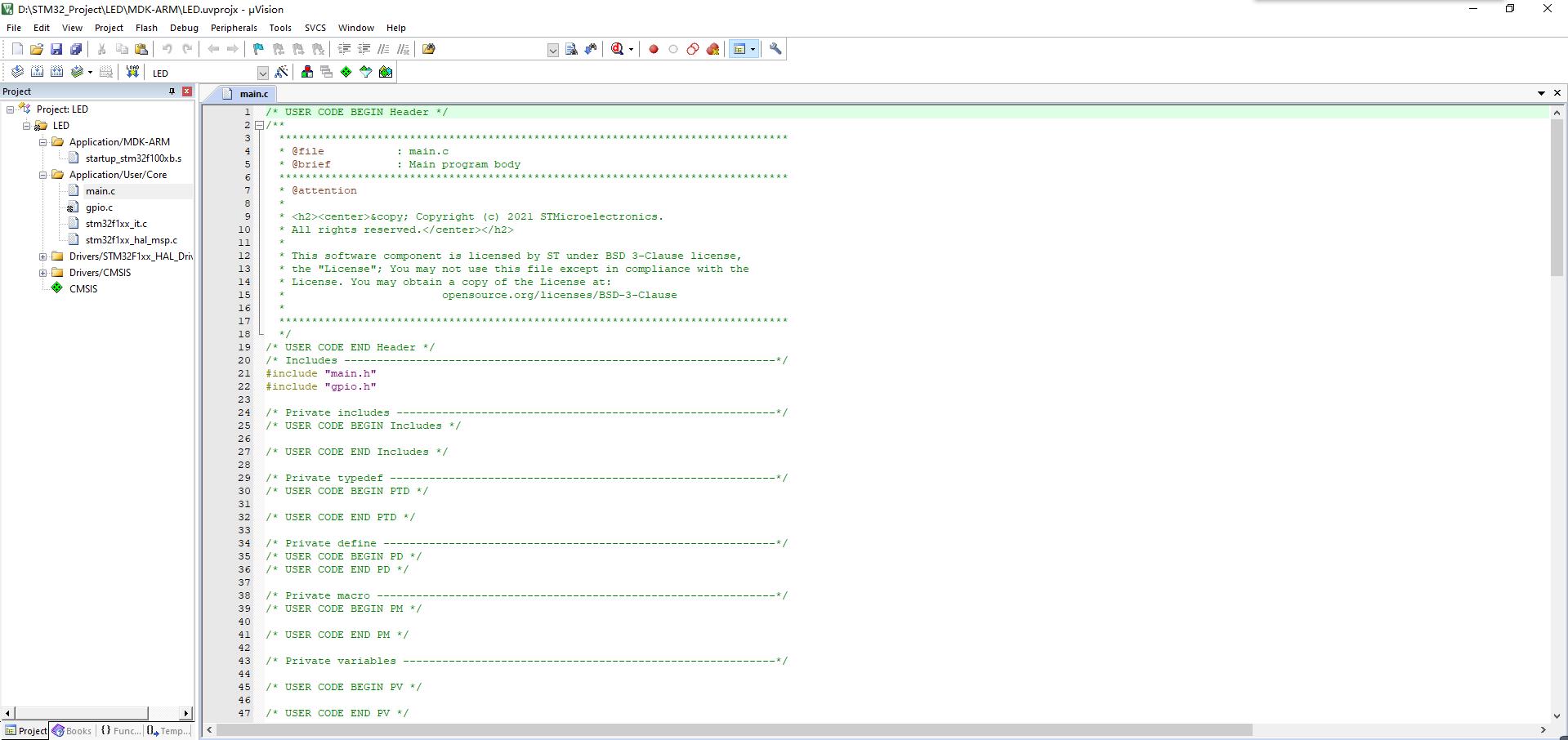
打开Application/User/Core中的main文件
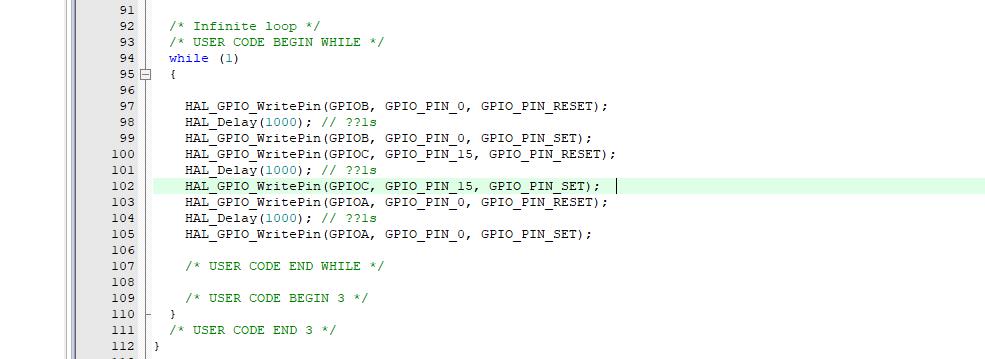
找到第九十四行的while循环 ,写入代码
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_RESET); // 灯1亮 HAL_Delay(1000); // 延时1s HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_SET); // 灯1灭 HAL_GPIO_WritePin(GPIOC, GPIO_PIN_15, GPIO_PIN_RESET); // 灯2亮 HAL_Delay(1000); // 延时1s HAL_GPIO_WritePin(GPIOC, GPIO_PIN_15, GPIO_PIN_SET); // 灯2灭 HAL_GPIO_WritePin(GPIOA, GPIO_PIN_0, GPIO_PIN_RESET); // 灯3亮 HAL_Delay(1000); // 延时1s HAL_GPIO_WritePin(GPIOA, GPIO_PIN_0, GPIO_PIN_SET); // 灯3灭
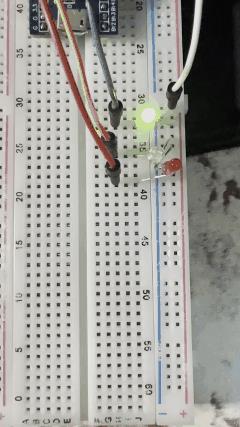
编译代码进行烧录,即完成LED的点亮
2.4 结果展示
三、串口通信
3.1 了解USART
主要特点
- 全双工操作(相互独立的接收数据和发送数据);
- 同步操作时,可主机时钟同步,也可从机时钟同步;
- 独立的高精度波特率发生器,不占用定时/计数器;
- 支持5、6、7、8和9位数据位,1或2位停止位的串行数据帧结构;
- 由硬件支持的奇偶校验位发生和检验;
- 数据溢出检测;
- 帧错误检测;
- 包括错误起始位的检测噪声滤波器和数字低通滤波器;
- 三个完全独立的中断,TX发送完成、TX发送数据寄存器空、RX接收完成;
- 支持多机通信模式;
- 支持倍速异步通信模式。
3.2 输出Hello world
Hello Wrold汇编代码如下
;RCC寄存器地址映像 RCC_BASE EQU 0x40021000 RCC_CR EQU (RCC_BASE + 0x00) RCC_CFGR EQU (RCC_BASE + 0x04) RCC_CIR EQU (RCC_BASE + 0x08) RCC_APB2RSTR EQU (RCC_BASE + 0x0C) RCC_APB1RSTR EQU (RCC_BASE + 0x10) RCC_AHBENR EQU (RCC_BASE + 0x14) RCC_APB2ENR EQU (RCC_BASE + 0x18) RCC_APB1ENR EQU (RCC_BASE + 0x1C) RCC_BDCR EQU (RCC_BASE + 0x20) RCC_CSR EQU (RCC_BASE + 0x24) ;AFIO寄存器地址映像 AFIO_BASE EQU 0x40010000 AFIO_EVCR EQU (AFIO_BASE + 0x00) AFIO_MAPR EQU (AFIO_BASE + 0x04) AFIO_EXTICR1 EQU (AFIO_BASE + 0x08) AFIO_EXTICR2 EQU (AFIO_BASE + 0x0C) AFIO_EXTICR3 EQU (AFIO_BASE + 0x10) AFIO_EXTICR4 EQU (AFIO_BASE + 0x14) ;GPIOA寄存器地址映像 GPIOA_BASE EQU 0x40010800 GPIOA_CRL EQU (GPIOA_BASE + 0x00) GPIOA_CRH EQU (GPIOA_BASE + 0x04) GPIOA_IDR EQU (GPIOA_BASE + 0x08) GPIOA_ODR EQU (GPIOA_BASE + 0x0C) GPIOA_BSRR EQU (GPIOA_BASE + 0x10) GPIOA_BRR EQU (GPIOA_BASE + 0x14) GPIOA_LCKR EQU (GPIOA_BASE + 0x18) ;GPIO C口控制 GPIOC_BASE EQU 0x40011000 GPIOC_CRL EQU (GPIOC_BASE + 0x00) GPIOC_CRH EQU (GPIOC_BASE + 0x04) GPIOC_IDR EQU (GPIOC_BASE + 0x08) GPIOC_ODR EQU (GPIOC_BASE + 0x0C) GPIOC_BSRR EQU (GPIOC_BASE + 0x10) GPIOC_BRR EQU (GPIOC_BASE + 0x14) GPIOC_LCKR EQU (GPIOC_BASE + 0x18) ;串口1控制 USART1_BASE EQU 0x40013800 USART1_SR EQU (USART1_BASE + 0x00) USART1_DR EQU (USART1_BASE + 0x04) USART1_BRR EQU (USART1_BASE + 0x08) USART1_CR1 EQU (USART1_BASE + 0x0c) USART1_CR2 EQU (USART1_BASE + 0x10) USART1_CR3 EQU (USART1_BASE + 0x14) USART1_GTPR EQU (USART1_BASE + 0x18) ;NVIC寄存器地址 NVIC_BASE EQU 0xE000E000 NVIC_SETEN EQU (NVIC_BASE + 0x0010) ;SETENA寄存器阵列的起始地址 NVIC_IRQPRI EQU (NVIC_BASE + 0x0400) ;中断优先级寄存器阵列的起始地址 NVIC_VECTTBL EQU (NVIC_BASE + 0x0D08) ;向量表偏移寄存器的地址 NVIC_AIRCR EQU (NVIC_BASE + 0x0D0C) ;应用程序中断及复位控制寄存器的地址 SETENA0 EQU 0xE000E100 SETENA1 EQU 0xE000E104 ;SysTick寄存器地址 SysTick_BASE EQU 0xE000E010 SYSTICKCSR EQU (SysTick_BASE + 0x00) SYSTICKRVR EQU (SysTick_BASE + 0x04) ;FLASH缓冲寄存器地址映像 FLASH_ACR EQU 0x40022000 ;SCB_BASE EQU (SCS_BASE + 0x0D00) MSP_TOP EQU 0x20005000 ;主堆栈起始值 PSP_TOP EQU 0x20004E00 ;进程堆栈起始值 BitAlias_BASE EQU 0x22000000 ;位带别名区起始地址 Flag1 EQU 0x20000200 b_flas EQU (BitAlias_BASE + (0x200*32) + (0*4)) ;位地址 b_05s EQU (BitAlias_BASE + (0x200*32) + (1*4)) ;位地址 DlyI EQU 0x20000204 DlyJ EQU 0x20000208 DlyK EQU 0x2000020C SysTim EQU 0x20000210 ;常数定义 Bit0 EQU 0x00000001 Bit1 EQU 0x00000002 Bit2 EQU 0x00000004 Bit3 EQU 0x00000008 Bit4 EQU 0x00000010 Bit5 EQU 0x00000020 Bit6 EQU 0x00000040 Bit7 EQU 0x00000080 Bit8 EQU 0x00000100 Bit9 EQU 0x00000200 Bit10 EQU 0x00000400 Bit11 EQU 0x00000800 Bit12 EQU 0x00001000 Bit13 EQU 0x00002000 Bit14 EQU 0x00004000 Bit15 EQU 0x00008000 Bit16 EQU 0x00010000 Bit17 EQU 0x00020000 Bit18 EQU 0x00040000 Bit19 EQU 0x00080000 Bit20 EQU 0x00100000 Bit21 EQU 0x00200000 Bit22 EQU 0x00400000 Bit23 EQU 0x00800000 Bit24 EQU 0x01000000 Bit25 EQU 0x02000000 Bit26 EQU 0x04000000 Bit27 EQU 0x08000000 Bit28 EQU 0x10000000 Bit29 EQU 0x20000000 Bit30 EQU 0x40000000 Bit31 EQU 0x80000000 ;向量表 AREA RESET, DATA, READONLY DCD MSP_TOP ;初始化主堆栈 DCD Start ;复位向量 DCD NMI_Handler ;NMI Handler DCD HardFault_Handler ;Hard Fault Handler DCD 0 DCD 0 DCD 0 DCD 0 DCD 0 DCD 0 DCD 0 DCD 0 DCD 0 DCD 0 DCD 0 DCD SysTick_Handler ;SysTick Handler SPACE 20 ;预留空间20字节 ;代码段 AREA |.text|, CODE, READONLY ;主程序开始 ENTRY ;指示程序从这里开始执行 Start ;时钟系统设置 ldr r0, =RCC_CR ldr r1, [r0] orr r1, #Bit16 str r1, [r0] ;开启外部晶振使能 ;启动外部8M晶振 ClkOk ldr r1, [r0] ands r1, #Bit17 beq ClkOk ;等待外部晶振就绪 ldr r1,[r0] orr r1,#Bit17 str r1,[r0] ;FLASH缓冲器 ldr r0, =FLASH_ACR mov r1, #0x00000032 str r1, [r0] ;设置PLL锁相环倍率为7,HSE输入不分频 ldr r0, =RCC_CFGR ldr r1, [r0] orr r1, #(Bit18 :OR: Bit19 :OR: Bit20 :OR: Bit16 :OR: Bit14) orr r1, #Bit10 str r1, [r0] ;启动PLL锁相环 ldr r0, =RCC_CR ldr r1, [r0] orr r1, #Bit24 str r1, [r0] PllOk ldr r1, [r0] ands r1, #Bit25 beq PllOk ;选择PLL时钟作为系统时钟 ldr r0, =RCC_CFGR ldr r1, [r0] orr r1, #(Bit18 :OR: Bit19 :OR: Bit20 :OR: Bit16 :OR: Bit14) orr r1, #Bit10 orr r1, #Bit1 str r1, [r0] ;其它RCC相关设置 ldr r0, =RCC_APB2ENR mov r1, #(Bit14 :OR: Bit4 :OR: Bit2) str r1, [r0] ;IO端口设置 ldr r0, =GPIOC_CRL ldr r1, [r0] orr r1, #(Bit28 :OR: Bit29) ;PC.7输出模式,最大速度50MHz and r1, #(~Bit30 & ~Bit31) ;PC.7通用推挽输出模式 str r1, [r0] ;PA9串口0发射脚 ldr r0, =GPIOA_CRH ldr r1, [r0] orr r1, #(Bit4 :OR: Bit5) ;PA.9输出模式,最大速度50MHz orr r1, #Bit7 and r1, #~Bit6 ;10:复用功能推挽输出模式 str r1, [r0] ldr r0, =USART1_BRR mov r1, #0x271 str r1, [r0] ;配置波特率-> 115200 ldr r0, =USART1_CR1 mov r1, #0x200c str r1, [r0] ;USART模块总使能 发送与接收使能 ;71 02 00 00 2c 20 00 00 ;AFIO 参数设置 ;Systick 参数设置 ldr r0, =SYSTICKRVR ;Systick装初值 mov r1, #9000 str r1, [r0] ldr r0, =SYSTICKCSR ;设定,启动Systick mov r1, #0x03 str r1, [r0] ;NVIC ;ldr r0, =SETENA0 ;mov r1, 0x00800000 ;str r1, [r0] ;ldr r0, =SETENA1 ;mov r1, #0x00000100 ;str r1, [r0] ;切换成用户级线程序模式 ldr r0, =PSP_TOP ;初始化线程堆栈 msr psp, r0 mov r0, #3 msr control, r0 ;初始化SRAM寄存器 mov r1, #0 ldr r0, =Flag1 str r1, [r0] ldr r0, =DlyI str r1, [r0] ldr r0, =DlyJ str r1, [r0] ldr r0, =DlyK str r1, [r0] ldr r0, =SysTim str r1, [r0] ;主循环 main ldr r0, =Flag1 ldr r1, [r0] tst r1, #Bit1 ;SysTick产生0.5s,置位bit 1 beq main ;0.5s标志还没有置位 ;0.5s标志已经置位 ldr r0, =b_05s ;位带操作清零0.5s标志 mov r1, #0 str r1, [r0] bl LedFlas mov r0, #\'H\' bl send_a_char mov r0, #\'e\' bl send_a_char mov r0, #\'l\' bl send_a_char mov r0, #\'l\' bl send_a_char mov r0, #\'o\' bl send_a_char mov r0, #\' \' bl send_a_char mov r0, #\'w\' bl send_a_char mov r0, #\'o\' bl send_a_char mov r0, #\'r\' bl send_a_char mov r0, #\'l\' bl send_a_char mov r0, #\'d\' bl send_a_char mov r0, #\'\\n\' bl send_a_char b main ;子程序 串口1发送一个字符 send_a_char push {r0 - r3} ldr r2, =USART1_DR str r0, [r2] b1 ldr r2, =USART1_SR ldr r2, [r2] tst r2, #0x40 beq b1 ;发送完成(Transmission complete)等待 pop {r0 - r3} bx lr ;子程序 led闪烁 LedFlas push {r0 - r3} ldr r0, =Flag1 ldr r1, [r0] tst r1, #Bit0 ;bit0 闪烁标志位 beq ONLED ;为0 打开led灯 ;为1 关闭led灯 ldr r0, =b_flas mov r1, #0 str r1, [r0] ;闪烁标志位置为0,下一状态为打开灯 ;PC.7输出0 ldr r0, =GPIOC_BRR ldr r1, [r0] orr r1, #Bit7 str r1, [r0] b LedEx ONLED ;为0 打开led灯 ldr r0, =b_flas mov r1, #1 str r1, [r0] ;闪烁标志位置为1,下一状态为关闭灯 ;PC.7输出1 ldr r0, =GPIOC_BSRR ldr r1, [r0] orr r1, #Bit7 str r1, [r0] LedEx pop {r0 - r3} bx lr ;异常程序 NMI_Handler bx lr HardFault_Handler bx lr SysTick_Handler ldr r0, =SysTim ldr r1, [r0] add r1, #1 str r1, [r0] cmp r1, #500 bcc TickExit mov r1, #0 str r1, [r0] ldr r0, =b_05s ;大于等于500次 清零时钟滴答计数器 设置0.5s标志位 ;位带操作置1 mov r1, #1 str r1, [r0] TickExit bx lr ALIGN ;通过用零或空指令NOP填充,来使当前位置与一个指定的边界对齐 END
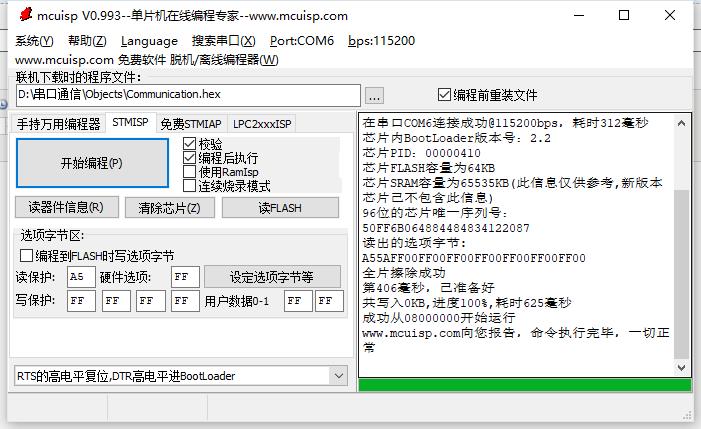
首先将程序烧录进单片机
随后断电,将BOOT0和BOOT1全部置位0,然后打开串口工具
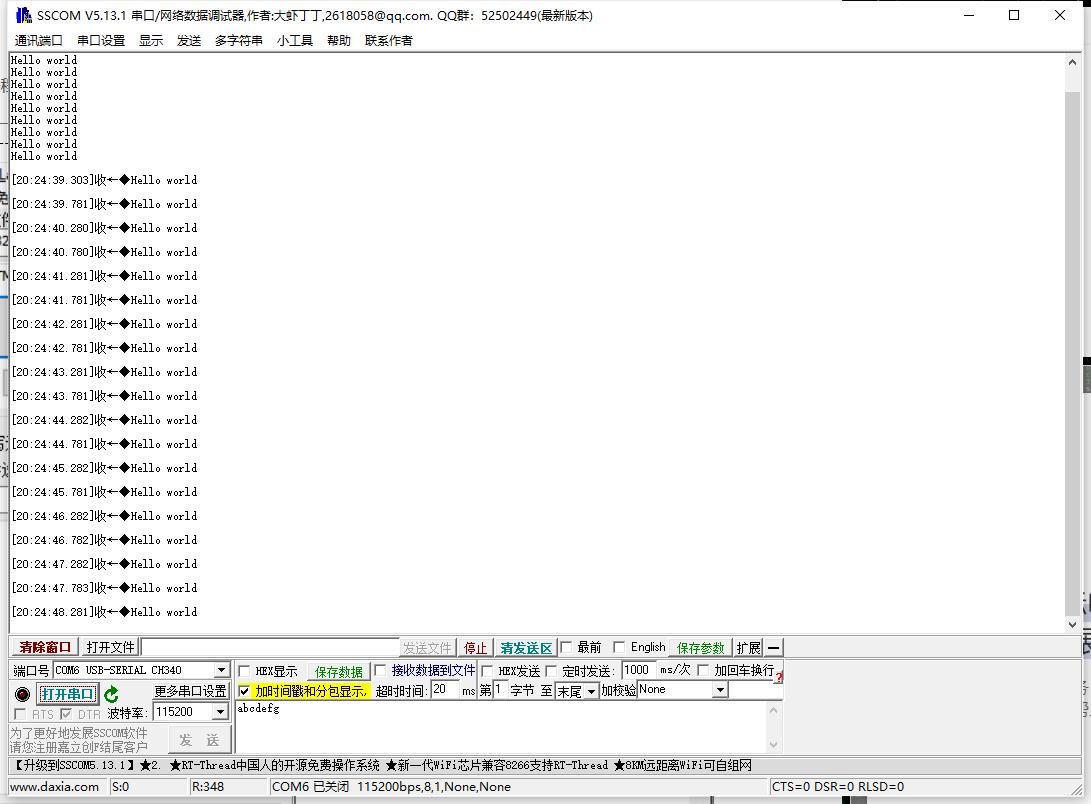
我们会看到连续不断的向上位机发送“Hello World”
四、波形观察
Keil 模拟调试使用逻辑分析仪
点击该选项
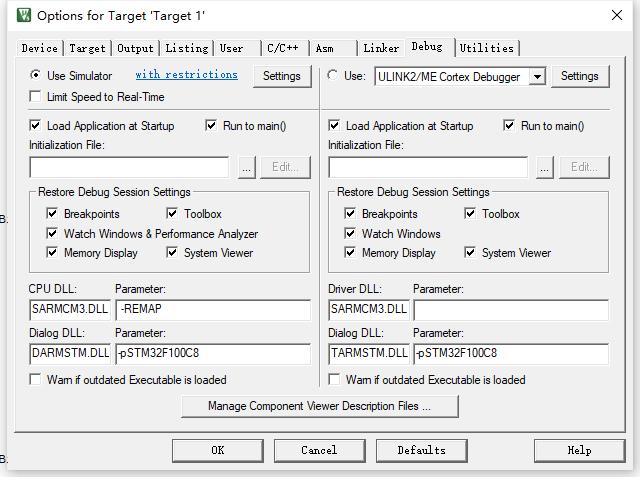
选择DEBUG,如果你的芯片和我一样 配置成和我一模一样即可,如果不一样,只需要讲STM后面的芯片系列进行修改即可。
然后点击红色的DEBUG选项

会多出逻辑分析仪器
选择即可
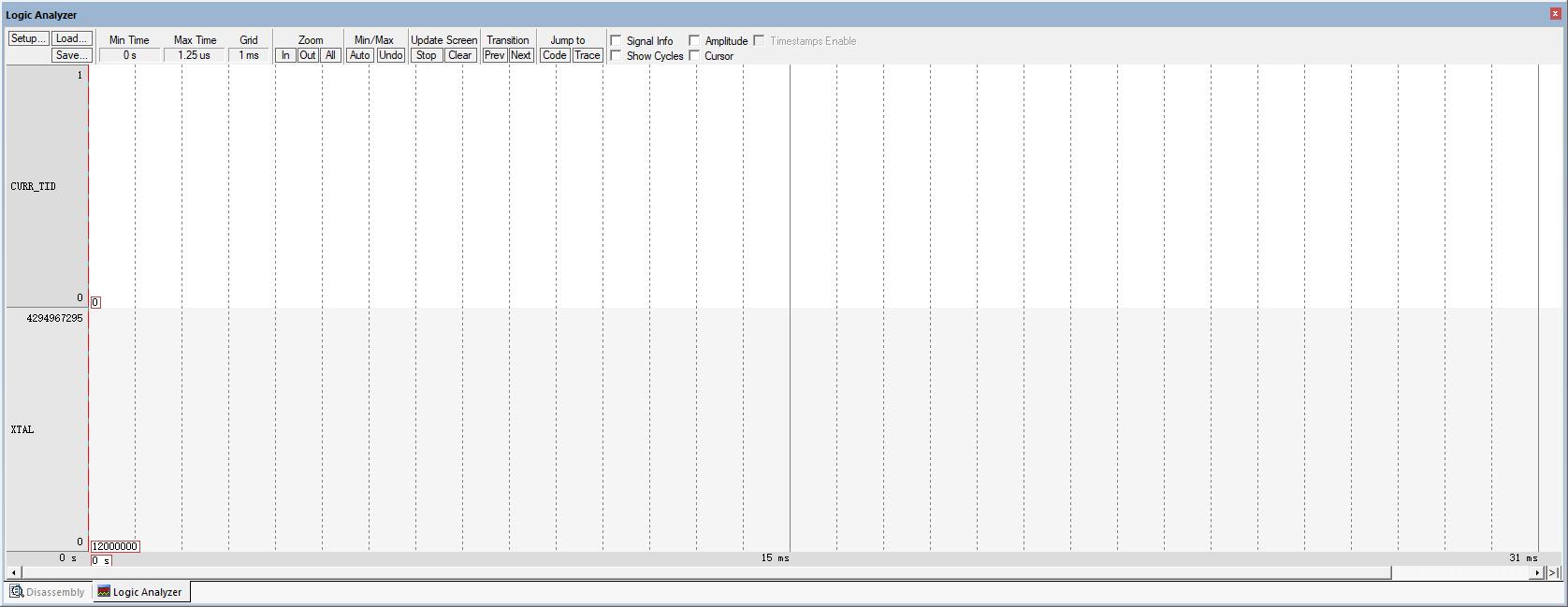
- setup:按钮用于定义记录信号的变量、并配置显示输出。
- save:按钮用于将当前已记录的信号写到一个文件(*.UVLA)中,一边之后进行分析,还可以存入一个.TAB文件中,使用其他外部工具进行分析。
- Min Time:抓取信号的开始时间。
- Max Time:抓取信号的结束时间。
- Grid:每个栅格代表的时间。
- Zoom:调整时基,相当于示波器的“水平”,In是放大,Out是缩小,All是把抓取的信号全部显示出来。可以用滚轮。
- Min/Max:调整抓取信号的最大值和最小值,这个不准确,如果知道目标的变化范围可以自己设置。
- Update Screen:用于更新抓取的信号。
- Transition:用于移动竖着那根红线,显示同一时刻所以观察信号的值。同时红线还是参考线,和鼠标位置配合可以测时间,相当于示波器的光标。
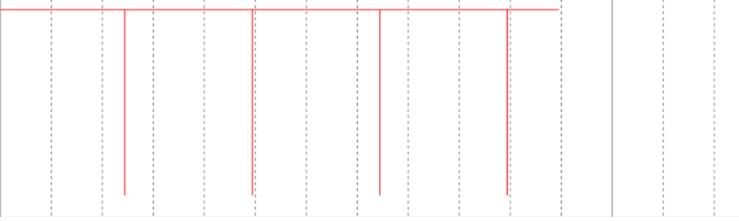
添加信号后运行结果如下
ROS串口通信简析(一)——串口发送
参考技术AROS节点程序运行过程中需要获取机器人的传感器信息和发送控制指令,因此不可避免要与机器人进行通信,常见的通讯方式有串口、CAN和网口等,其中串口最为普遍。
ROS通过自带的 serial 包连接串口设备,进行串口通信,需要提前安装 serial 包:
sudo apt-get install ros-melodic-serial
串口通信根据数据传输方向可以分为 串口发送 和 串口接收 。
通过串口发送数据时,需要明确发送机制,常见的发送机制有:
定时发送是通过设定定时器,以 固定频率 发送数据包;
触发条件发送是通过条件判断语句,判断某个标志位或某个事件发生后,再发送数据包,特点是 频率不固定 。
发送数据分为两个步骤:
由此可知buffer数据结构需要可同时被这两个步骤访问,buffer需要为全局变量。
首先根据通信协议定义buffer中的帧头、帧尾等固定内容,然后接收别的Topic,获取待发送数据,把获取的数据填入到协议的数据段,最后根据数据段计算校验码。
1 订阅发送数据的Topic
serial_sub = nh.subscribe("/joy", 10, &DecodeFrame::serial_sub_callback,this);
2 根据Topic填入数据段和校验
1 创建定时回调函数
首先需要创建一个定时器,设定发送频率,并指定回调函数名称
write_rs232_timer = nh.createTimer(ros::Duration(0.01), &DecodeFrame::CB_write_rs232_Cycle, this);
2 通过 serial 将buffer数据写入串口设备
实例化串口对象,并打开串口
发送数据到串口设备上
注意1:发送数据节点挂掉
若发送数据Topic的节点挂掉后,由于buffer是全局变量,buffer的数据段会一直是上一帧的数据,不会再改变,为避免上述情况,在将数据写入串口设备后, 将数据段清零。
注意2:joystick包发送机制
在使用PS3/PS4、Xbox手柄时,使用ros-melodic-joy包获取摇杆数据,手柄的遥杆或者按键如果一直处于同一位置(初始零位和最大值)只会发送一帧数据,不会连续发送, 只有当摇杆数据变化时,才会发送数据。
因此使用 rostopic hz /joy 会显示没有msg信息传输,所以串口程序不会进回调函数获取发送数据,但是数值确实是一直保持的, 所以就不能将数据段清零。
触发条件发送与定时发送相比的最大不同之处在于发送频率不同,不需要设置定时器,在满足条件后直接将数据写入串口即可。
以上是关于STM32CubeMX与串口通信的主要内容,如果未能解决你的问题,请参考以下文章
11-CubeMx+Keil+Proteus仿真STM32 -串口单字节通信