实战 | OpenCV实现棋盘图像识别
Posted 计算机视觉life
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了实战 | OpenCV实现棋盘图像识别相关的知识,希望对你有一定的参考价值。
快速获得最新干货
本期我们将一起学习如何使用计算机视觉技术识别棋子及其在棋盘上的位置
我们利用计算机视觉技术和卷积神经网络(CNN)为这个项目创建分类算法,并确定棋子在棋盘上的位置。最终的应用程序会保存整个图像并可视化的表现出来,同时输出棋盘的2D图像以查看结果。
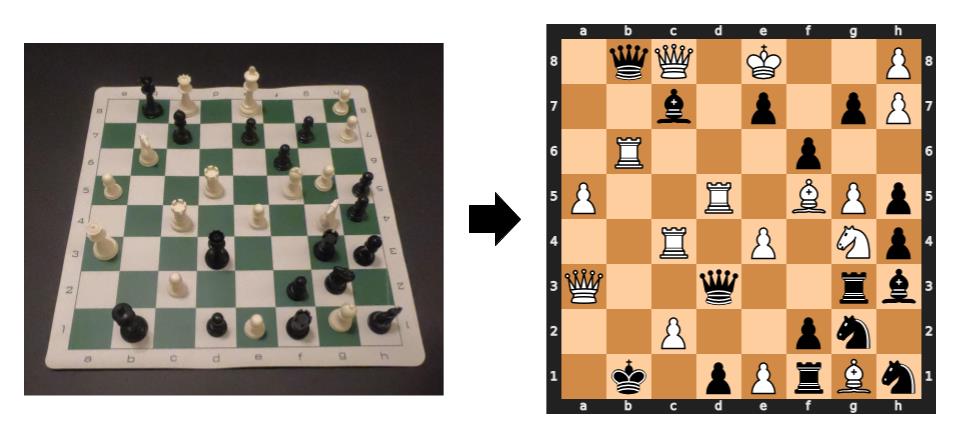
(左)实时摄像机进给的帧和棋盘的(右)二维图像
我们对该项目的数据集有很高的要求,因为它最终会影响我们的实验结果。我们在网上能找到的国际象棋数据集是使用不同的国际象棋集、不同的摄影机拍摄得到的,这导致我们创建了自己的数据集。我使用国际象棋和摄像机(GoPro Hero6 Black以“第一人称视角”角度)生成了自定义数据集,这使我的模型更加精确。该数据集包含2406张图像,分为13类(请参阅下文)。总结:这花费了我们很多时间,但是这使得训练图像尽可能地接近在应用程序中使用时所看到的图像。
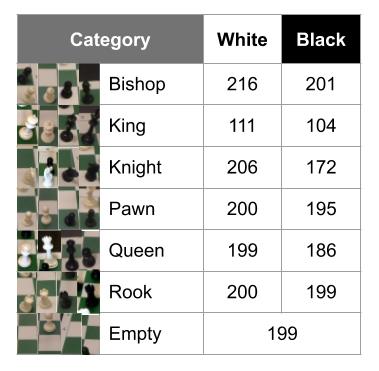
自定义数据集的细分
为了构建该数据集,我首先创建了capture_data.py,当单击S键时,该视频从视频流中获取一帧并将其保存。这个程序使我能够无缝地更改棋盘上的棋子并一遍又一遍地捕获棋盘的图像,直到我建立了大量不同的棋盘配置为止。接下来,我创建了create_data.py,以使用下一部分中讨论的检测技术将其裁剪为单独小块。最后,我通过将裁剪后的图像分成带标签的文件夹来对它们进行分类。
对于棋盘检测,我想做的事情比使用OpenCV函数findChessboardCorners复杂的多,但又不像CNN那样高级。使用低级和中级计算机视觉技术来查找棋盘的特征,然后将这些特征转换为外边界和64个独立正方形的坐标。该过程以Canny边缘检测和Hough变换生成的相交水平线、垂直线的交点为中心。层次聚类用于按距离对交叉点进行分组,并对各组取平均值以创建最终坐标(请参见下文)。
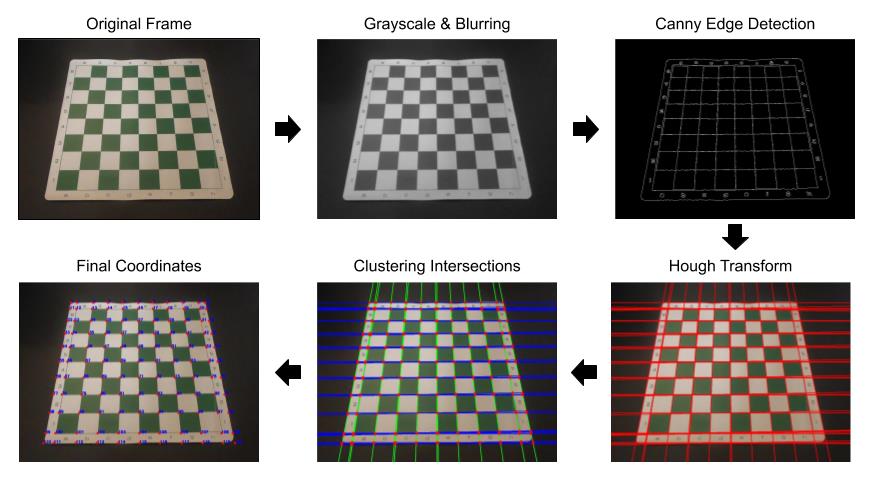
完整的棋盘检测过程
项目伊始,我们想使用Keras / TensorFlow创建CNN模型并对棋子进行分类。但是,在创建数据集之后,仅考虑CNN的大小,单靠CNN就无法获得想要的结果。为了克服这一障碍,我利用了ImageDataGenerator和transfer learning,它增加了我的数据并使用了其他预训练的模型作为基础。
创建CNN模型
为了使用GPU,我在云中创建并训练了CNN模型,从而大大减少了训练时间。快速提示:Google Colab是使用GPU快速入门的简便方法。为了提高数据的有效性,我使用了ImageDataGenerator来扩展原始图像并将模型暴露给不同版本的数据。ImageDataGenerator函数针对每个时期随机旋转,重新缩放和翻转(水平)训练数据,从本质上创建了更多数据。尽管还有更多的转换选项,但这些转换选项对该项目最有效。
from keras.preprocessing.image import ImageDataGeneratordatagen = ImageDataGenerator(rotation_range=5,rescale=1./255,horizontal_flip=True,fill_mode='nearest')test_datagen = ImageDataGenerator(rescale=1./255)train_gen = datagen.flow_from_directory(folder + '/train',target_size = image_size,batch_size = batch_size,class_mode = 'categorical',color_mode = 'rgb',shuffle=True)test_gen = test_datagen.flow_from_directory(folder + '/test',target_size = image_size,batch_size = batch_size,class_mode = 'categorical',color_mode = 'rgb',shuffle=False)
我们没有从头开始训练模型,而是通过利用预先训练的模型并添加了使用我的自定义数据集训练的顶层模型来实现转移学习。我遵循了典型的转移学习工作流程:
1.从先前训练的模型(VGG16)中获取图层。
from keras.applications.vgg16 import VGG16model = VGG16(weights='imagenet')model.summary()
2.冻结他们,以避免破坏他们在训练回合中包含的任何信息。
3.在冻结层的顶部添加了新的可训练层。
from keras.models import Sequentialfrom keras.layers import Dense, Conv2D, MaxPooling2D, Flattenfrom keras.models import Modelbase_model = VGG16(weights='imagenet', include_top=False, input_shape=(224,224,3))# Freeze convolutional layers from VGG16for layer in base_model.layers:layer.trainable = False# Establish new fully connected blockx = base_model.outputx = Flatten()(x)x = Dense(500, activation='relu')(x)x = Dense(500, activation='relu')(x)predictions = Dense(13, activation='softmax')(x)# This is the model we will trainmodel = Model(inputs=base_model.input, outputs=predictions)model.compile(optimizer='adam', loss='categorical_crossentropy', metrics=['categorical_accuracy'])
4.在自定义数据集上训练新层。
epochs = 10history = model.fit(epochs=epochs,verbose = 1,validation_data=test_gen)model.save_weights('model_VGG16.h5')
当我们使用VGG16或VGG19作为预训练模型创建模型时,由于验证精度更高,因此选择了使用VGG16的模型。另外,最佳epochs 是10。任何大于10的数均不会使验证准确性的提高,也不会增加训练与验证准确性之间的差异。总结:转移学习使我们可以充分利用深度学习在图像分类中的优势,而无需大型数据集。
为了更好地可视化验证准确性,我创建了模型预测的混淆矩阵。通过此图表,可以轻松评估模型的优缺点。优点:空-准确率为99%,召回率为100%;白棋和黑棋(WP和BP)-F1得分约为95%。劣势:白骑士(WN)-召回率高(98%),但准确性却很低(65%);白主教(WB)-召回率最低,为74%。
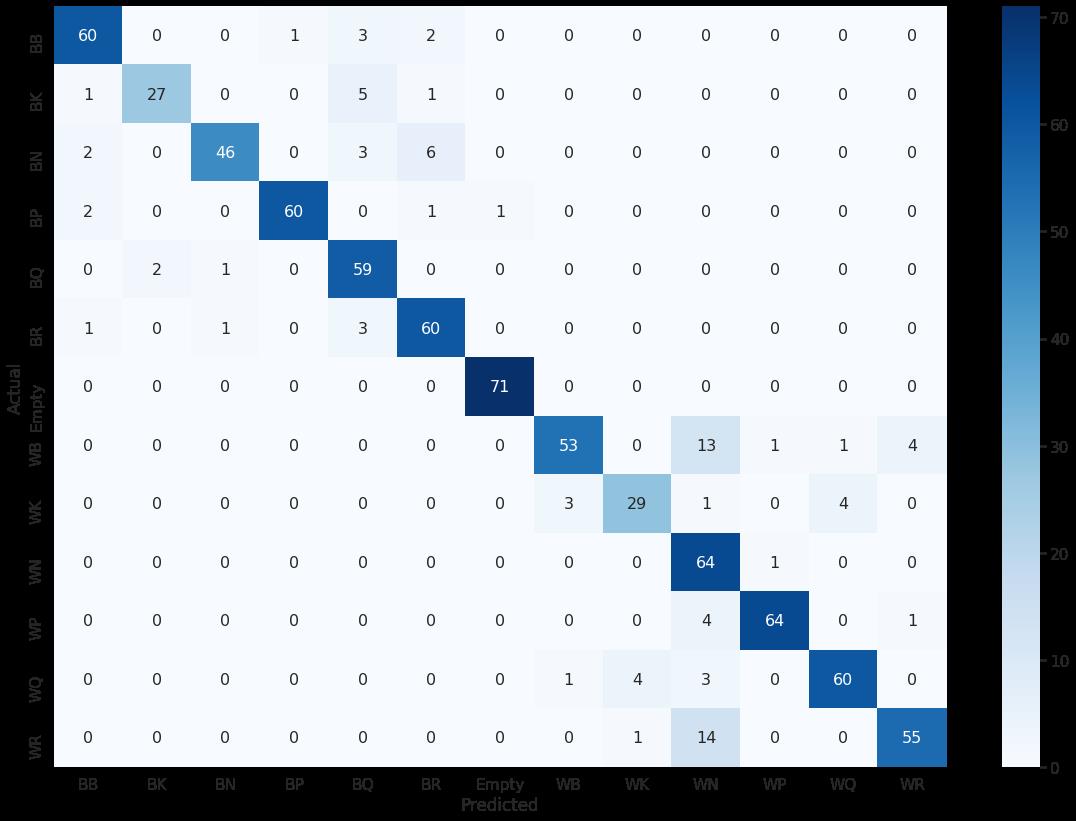
测试数据的混淆矩阵
该应用程序的目标是使用CNN模型并可视化每个步骤的性能。我们创建了cv_chess.py,它清楚地显示了步骤,并创建了cv_chess_functions.py,它显示了每个步骤的详细信息。此应用程序保存实时视频流中的原始帧,每个正方形的64个裁剪图像以及棋盘的最终2D图像。
print('Working...')# Save the frame to be analyzedcv2.imwrite('frame.jpeg', frame)# Low-level CV techniques (grayscale & blur)img, gray_blur = read_img('frame.jpeg')# Canny algorithmedges = canny_edge(gray_blur)# Hough Transformlines = hough_line(edges)# Separate the lines into vertical and horizontal lines h_lines, v_lines = h_v_lines(lines)# Find and cluster the intersectingintersection_points = line_intersections(h_lines, v_lines) points = cluster_points(intersection_points)# Final coordinates of the boardpoints = augment_points(points)# Crop the squares of the board a organize into a sorted list x_list = write_crop_images(img, points, 0)img_filename_list = grab_cell_files() img_filename_list.sort(key=natural_keys)# Classify each square and output the board in Forsyth-Edwards Notation (FEN)fen = classify_cells(model, img_filename_list)# Create and save the board image from the FENboard = fen_to_image(fen)# Display the board in ASCIIprint(board)# Display and save the chessboard imageboard_image = cv2.imread('current_board.png') cv2.imshow('current board', board_image)print('Completed!')
代码链接:https://github.com/andrewleeunderwood/project_MYM
欢迎加入「从零开始学习SLAM」知识星球一起学习!
星球里目前已经有接近2200+人。包含三维重建、机器人SLAM方向沉淀了2年多的干货,包括大量图文、视频教学视频、实习/校招/社招机会、笔试面试题目及解析、疑难解惑、领域内最新开源论文/代码/数据集等(详细介绍见后),还可以加入粉丝专属微信交流群/星球内部资料、每天只需几毛钱,即可快速触达我们优质技术社区,一起交流学习,不管是刚刚入门的新手,还是已经是行业的从业者,都能获益良多~
现在加入立减30元,优惠有效期到12月29日晚上24点截止,名额有限,先到先得,3天内不满意可全额退款。
另外,我们推出的视频课程:《全网最详细的ORB-SLAM2精讲:原理推导+逐行代码分析》报名火爆,目前还有少量名额,现在加入知识星球可以享受课程额外再立减100的优惠!具体领取方式详见星球内
长按或扫描二维码查看课程介绍和购买方式:
交流群
投稿、合作也欢迎联系:simiter@126.com
扫描关注视频号,看最新技术落地及开源方案视频秀 ↓


以上是关于实战 | OpenCV实现棋盘图像识别的主要内容,如果未能解决你的问题,请参考以下文章
Opencv 图像识别Android实战(识别扑克牌 4.图像识别扫盲)