Linux设备驱动基础02之中断处理
Posted PanGC2014
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Linux设备驱动基础02之中断处理相关的知识,希望对你有一定的参考价值。
一、基础概念
中断系统是一个处理器的重要且基本的组成部分,可以极大提高CPU的执行效率,一般中断系统框架组成如下图:
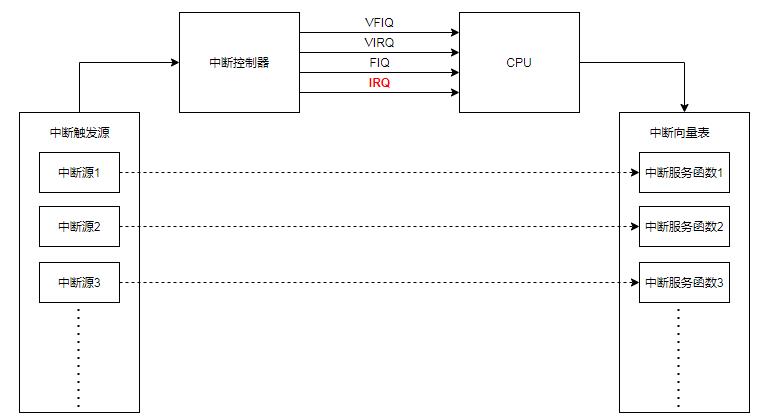
1、中断控制器
中断控制器是整个中断系统的管理机构。Cortex-A中断控制器叫GIC(Gerneral Interrupt controller)。目前GIC有4个版本:V1~V4,版本V1已经废弃,版本V2是给ARMv7-A架构使用,比如Cortex-A7、Cortex-A9、Cortex-A15等,版本V3和V4是给ARMv8-A/R架构使用。当GIC接收到众多外部中断,然后对其进行处理,最终只提供四个信号给ARM内核汇报中断情况:
VFIQ:虚拟快速FIQ
VIRQ:虚拟快速IRQ
FIQ:快速中断IRQ
IRQ:外部中断IRQ
这里只用IRQ,相当于GIC最终向ARM内核只上报一个IRQ的信号。中断源有很多,每个中断源有一个唯一的ID,叫做中断ID。每个CPU最多支持1020个中断ID,中断ID号为ID0~ID1019,这1020个ID分属以下三类:
SPI(Shared Peripheral Interrupt):共享中断,即所有Core共享的中断。所有外部中断都属于SPI中断,比如按键、串口中断等,这些中断所有的Core都可处理。中断ID32~1019分配给SPI。
PPI(Private Peripheral Interrupt):私有中断,因为GIC支持多核,每个核均有自己独有的中断,这些独有的中断肯定是要指定的核心处理。中断ID16~31分配给PPI。
SGI(Software Generated Interrupt):软中断,由软件触发引起的中断,通过向寄存器GICD_SGIR写入数据触发,系统会使用SGI中断来完成多核之间的通信。中断ID0~15分配给SGI。
GIC逻辑架构分为成两个逻辑块:Distributor和CPU Interface,也就是分发器端和CPU接口端。这两个逻辑块的含义如下:
Distributor(分发器端):负责处理各个中断事件的分发问题,也就是中断事件应该发送到哪个CPU Interface上去。分发器收集所有的中断源,可以控制每个中断的优先级,它总是将优先级最高的中断事件发送到CPU接口端。分发器端要做的主要工作如下:
①、全局中断使能控制。
②、控制每一个中断的使能或者关闭。
③、设置每个中断的优先级。
④、设置每个中断的目标处理器列表。
⑤、设置每个外部中断的触发模式:电平触发或边沿触发。
⑥、设置每个中断属于组0还是组1。
CPU Interface(CPU接口端):每个CPU Core都可以在GIC中找到一个与之对应的CPU Interface。CPU接口端就是分发器和CPU Core之间的桥梁,CPU接口端主要工作如下:
①、使能或者关闭发送到CPU Core的中断请求信号。
②、应答中断。
③、通知中断处理完成。
④、设置优先级掩码,通过掩码来设置哪些中断不需要上报给CPU Core。
⑤、定义抢占策略。
⑥、当多个中断到来的时候,选择优先级最高的中断通知给CPU Core。
2、中断向量表
中断向量表是一个表,这个表里面存放的是中断向量,中断向量表是由一系列中断服务函数入口地址组成的表。这些中断服务函数在中断向量表中的位置是由半导体厂家决定,当某个中断被触发后,就会自动跳转到中断向量表中对应的中断服务函数入口地址处,中断向量表在整个程序的最前面,需要链接到代码的最前面,一般ARM处理器是从地址0X00000000开始执行指令,那么中断向量表就是从0X00000000开始存放;比如Cortex-A7有8个异常中断,这8个异常中断的中断向量表如下所示。
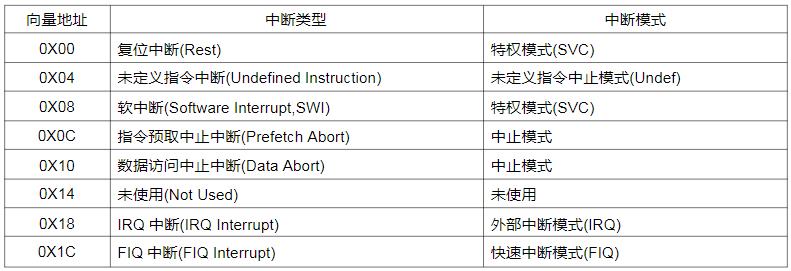
对于Cortex-A所有的外部中断都属于IRQ中断,比如I2C、SPI、定时器等。任意一个外部中断发生后都会触发IRQ中断,在IRQ的中断服务函数中可以读取指定的寄存器来判断具体是什么中断,进而根据具体中断做出相应处理。
3、中断服务函数
中断发生以后,中断服务函数就会被调用,需要处理的工作就可以放到中断服务函数中去完成。
4、中断使能
中断使能包括两部分,一个是IRQ或FIQ总中断使能,另一个就是ID0~ID1019中断源的使能。
二、中断处理相关API
Linux内核提供了完善的中断框架,我们只需要申请中断,然后注册中断处理函数即可。每个中断都有一个中断号,通过中断号即可区分不同的中断,中断号也叫中断线。Linux内核中使用一个int变量表示中断号。
(1)、int request_irq(unsigned int irq, irq_handler_t handler, unsigned long flags, const char *name, void *dev);
request_irq函数用于申请中断, 该函数可能会导致睡眠,因此不能在中断上下文或者其他禁止睡眠的代码段中使用request_irq函数。 request_irq 函数会激活(使能)中断,所以不需要我们手动去使能中断。
irq:要申请中断的中断号。
handler:中断处理函数,当中断发生以后就会执行此中断处理函数。
flags:中断标志,可以在文件include/linux/interrupt.h里面查看所有的中断标志,常用的中断标志如下表。
name:中断名字,设置以后可以在/proc/interrupts文件中看到对应的中断名字。
dev:如果将flags设置为IRQF_SHARED,dev用来区分不同的中断,一般将dev设置为设备结构体,将其传递给中断处理函数irq_handler_t的第二个参数。
返回值:0表示中断申请成功,其他负值表示中断申请失败,如果返回-EBUSY表示中断已经被申请。

(2)、irqreturn_t (*irq_handler_t) (int, void *);
是一个函数指针,表示使用 request_irq 函数申请中断的时候设置的中断处理函数。第一个参数是中断处理函数相应的中断号。第二个参数是一个指向void的通用指针,需要与request_irq函数的dev参数保持一致,用于区分共享中断的不同设备。
(3)、void free_irq(unsigned int irq, void *dev);
free_irq函数释放掉相应的中断。如果中断不是共享的,那么free_irq会删除中断处理函数并且禁止中断。
irq:要释放的中断。 dev:如果中断设置为共享(IRQF_SHARED),用来区分具体的中断。共享中断只有在释放最后中断处理函数时才会被禁止掉。
(4)、void enable_irq(unsigned int irq);
使能指定的中断。
(5)、void disable_irq(unsigned int irq);
禁止指定的中断,要等到当前正在执行的中断处理函数执行完才返回,因此使用者需要保证不会产生新的中断,并且确保所有已经开始执行的中断处理程序已经全部退出。
(6)、void disable_irq_nosync(unsigned int irq);
禁止指定的中断,调用以后立即返回,不会等待当前中断处理程序执行完毕。
(7)、local_irq_enable();
使能当前处理器中断系统。
(8)、local_irq_disable();
禁止当前处理器中断系统。
(9)、local_irq_save(flags) 与 local_irq_restore(flags); 这两个函数是一对,local_irq_save函数用于禁止中断,并且将中断状态保存在flags中。local_irq_restore用于恢复中断,将中断到flags状态。
三、上半部和下半部
也将上半部和下半部称为顶半部和底半部。使用request_irq函数申请中断的时候注册的中断服务函数属于中断处理的上半部,只要中断触发,那么中断处理函数就会执行。
中断处理函数一定要快点执行完毕,越短越好,但是有些中断处理过程比较费时间,我们必须要对其进行处理,缩小中断处理函数的执行时间。所以可以在中断处理函数中仅仅响应中断,然后清除中断标志即可,这时中断处理过程分为两部分:
上半部:上半部就是中断处理函数,那些处理过程比较快,不会占用很长时间的处理就可以放在上半部完成。
下半部:如果中断处理过程比较耗时,那么就将这些比较耗时的代码提出来,交给下半部去执行,这样中断处理函数就会快进快出。
上半部和下半部工作分配的参考建议:
(1)、如果要处理的内容不希望被其他中断打断,那么可以放到上半部。
(2)、如果要处理的任务对时间敏感,可以放到上半部。
(3)、如果要处理的任务与硬件有关,可以放到上半部
(4)、除了上述三点以外的其他任务,优先考虑放到下半部。 中断处理中上半部很简单,直接编写中断处理函数就行,关键是下半部。
Linux内核提供了多种下半部机制:软中断、tasklet和工作队列。
四、下半部实现机制
1、软中断
刚开始Linux内核提供“bottom half”机制来实现下半部,简称“BH”。后面引入软中断和tasklet来替代“BH”机制,从 2.5 版本Linux内核开始,BH机制已经被抛弃。 Linux 内核使用结构体 softirq_action 表示软中断, softirq_action结构体定义在文件include/linux/interrupt.h中,成员action就是软中断的服务函数,结构体内容如下:
struct softirq_action {
void (*action)(struct softirq_action *);
};在kernel/softirq.c文件中共定义10个软中断,为一个静态结构体数组变量: static struct softirq_action softirq_vec[NR_SOFTIRQS]; 在include/linux/interrupt.h文件中定义了枚举类型NR_SOFTIRQS:
enum {
HI_SOFTIRQ=0, //高优先级软中断
TIMER_SOFTIRQ, //定时器软中断
NET_TX_SOFTIRQ, //网络数据发送软中断
NET_RX_SOFTIRQ, //网络数据接收软中断
BLOCK_SOFTIRQ,
BLOCK_IOPOLL_SOFTIRQ,
TASKLET_SOFTIRQ, //tasklet软中断
SCHED_SOFTIRQ, //调度相关软中断
HRTIMER_SOFTIRQ, //高精度定时器软中断
RCU_SOFTIRQ, //RCU软中断
NR_SOFTIRQS
};需要注意的是数组softirq_vec有10个元素,并且为一个全局数组,每个CPU都可以访问到,但是每个CPU都有自己触发和控制机制,只执行自己所触发的软中断。每个CPU执行的软中断服务函数都是相同的。与软中断相关的API如下:
(1)、void open_softirq(int nr, void (*action)(struct softirq_action *));
open_softirq函数注册对应的软中断处理函数。
nr:要开启的软中断,为上面所示的枚举变量,如NET_RX_SOFTIRQ等。
action:软中断对应的处理函数。
(2)、void raise_softirq(unsigned int nr);
raise_softirq函数触发注册好的软中断。
nr:要触发的软中断,为上面所示的枚举变量,如NET_RX_SOFTIRQ等。
(3)、void __init softirq_init(void);
软中断必须在编译的时候静态注册,softirq_init函数初始化软中断,定义在kernel/softirq.c文件中,详细如下:
void __init softirq_init(void) {
int cpu;
for_each_possible_cpu(cpu) {
per_cpu(tasklet_vec, cpu).tail = &per_cpu(tasklet_vec, cpu).head;
per_cpu(tasklet_hi_vec, cpu).tail = &per_cpu(tasklet_hi_vec, cpu).head;
}
open_softirq(TASKLET_SOFTIRQ, tasklet_action);
open_softirq(HI_SOFTIRQ, tasklet_hi_action);
}2、tasklet
利用软中断来实现的另一种下半部机制,在软中断和tasklet之间,建议使用tasklet。结构体tasklet_struct表示一个tasklet,详细内容如下:
struct tasklet_struct
{
struct tasklet_struct *next; /* 下一个tasklet */
unsigned long state; /* tasklet状态 */
atomic_t count; /* 计数器,记录对tasklet的引用数 */
void (*func)(unsigned long); /* tasklet执行的函数 */
unsigned long data; /* 函数func的参数 */
};
Linux提供tasklet相关API如下:
(1) 、void tasklet_init(struct tasklet_struct *t, void (*func)(unsigned long), unsigned long data);
tasklet_init函数初始化tasklet。
t:要初始化的 tasklet
func: tasklet 的处理函数。
data: 要传递给 func 函数的参数。
(2)、DECLARE_TASKLET(name, func, data)
这是一个宏,可以一次性完成tasklet的定义和初始化,其中name为要定义的tasklet名字,即tasklet_struct类型的变量,func就是tasklet的处理函数,data是传递给func函数的参数。
(3)、void tasklet_schedule(struct tasklet_struct *t);
tasklet_schedule函数使tasklet在合适的时间运行,这个函数需要在上半部,即中断处理函数中显式调用。
t:要调度的 tasklet,也就是DECLARE_TASKLET宏里面的name,即tasklet_struct变量。
(4)、tasklet使用示例:
struct tasklet_struct tasklet; /* 定义 tasklet */
/* 定义 tasklet 处理函数 */
void tasklet_func(unsigned long data)
{
/* tasklet具体处理内容 */
}
/* 中断处理函数 */
irqreturn_t irq_handler(int irq, void *dev_id)
{
tasklet_schedule(&tasklet); /* 调度tasklet */
}
/* 驱动入口函数 */
static int __init xxx_init(void)
{
tasklet_init(&tasklet, tasklet_func, data); /* 初始化tasklet */
request_irq(xxx_irq, test_handler, 0, "xxx", &xxx_dev); /* 注册中断处理函数 */
}
3、工作队列
工作队列是另一种下半部处理方式,工作队列在进程上下文执行,工作队列将要推后的工作交给一个内核线程去执行,因为工作队列工作在进程上下文,因此工作队列允许睡眠或重新调度。如果要推后的工作可以睡眠,那么就可以选择工作队列,否则只能选择软中断或tasklet。
结构体work_struct表示一个工作,许多工作组织成工作队列,工作队列使用workqueue_struct结构体表示。工作者线程(worker thread)处理工作队列中的各个工作,worker结构体表示工作者线程。每个工作者线程都有一个工作队列,工作者线程处理自己工作队列中的所有工作。在实际的驱动开发中,我们只需要定义工作(work_struct)即可,关于工作队列和工作者线程我们基本不用去管。
(1)、结构体work_struct定义如下:
struct work_struct {
atomic_long_t data;
struct list_head entry;
work_func_t func; /* 工作队列处理函数 */
};
(2)、结构体workqueue_struct 定义如下:
struct workqueue_struct {
struct list_head pwqs;
struct list_head list;
struct mutex mutex;
int work_color;
int flush_color;
atomic_t nr_pwqs_to_flush;
struct wq_flusher *first_flusher;
struct list_head flusher_queue;
struct list_head flusher_overflow;
struct list_head maydays;
struct worker *rescuer;
int nr_drainers;
int saved_max_active;
struct workqueue_attrs *unbound_attrs;
struct pool_workqueue *dfl_pwq;
char name[WQ_NAME_LEN];
struct rcu_head rcu;
unsigned int flags ____cacheline_aligned;
struct pool_workqueue __percpu *cpu_pwqs;
struct pool_workqueue __rcu *numa_pwq_tbl[];
};
(3)、结构体worker定义如下:
struct worker {
union {
struct list_head entry;
struct hlist_node hentry;
};
struct work_struct *current_work;
work_func_t current_func;
struct pool_workqueue *current_pwq;
bool desc_valid;
struct list_head scheduled;
struct task_struct *task;
struct worker_pool *pool;
struct list_head node;
unsigned long last_active;
unsigned int flags;
int id;
char desc[WORKER_DESC_LEN];
struct workqueue_struct *rescue_wq;
};
(4)、定义一个work_struct结构体变量,然后使用INIT_WORK宏来初始化工作,INIT_WORK宏定义如下:
#define INIT_WORK(_work, _func)
其中_work表示要初始化的工作,_func是工作对应的处理函数。也可使用DECLARE_WORK宏一次性完成工作的创建和初始化,宏定义如下:
#define DECLARE_WORK(n, f) 其中n表示定义的工作,f表示工作对应的处理函数。
(5)、调度工作,和tasklet类似,工作也是需要调度才能运行,需要在中断处理函数中调用调度函数schedule_work,函数原型如下所示:
bool schedule_work(struct work_struct *work);
参数work:要调度的工作。返回值: 0成功,其他值失败。
(6)、工作队列使用示例
struct work_struct work; /* 定义work */
/* work 处理函数 */
void work_func(struct work_struct *work);
{
/* work 具体处理内容 */
}
/* 中断处理函数 */
irqreturn_t irq_handler(int irq, void *dev_id)
{
schedule_work(&work); /* 调度work */
}
/* 驱动入口函数 */
static int __init xxx_init(void)
{
INIT_WORK(&work, work_func); /* 初始化work */
request_irq(xxx_irq, irq_handler, 0, "xxx", &xxx_dev); /* 注册中断处理函数 */
}
以上是关于Linux设备驱动基础02之中断处理的主要内容,如果未能解决你的问题,请参考以下文章