激光雷达与相机:哪个最适合自动驾驶汽车?
Posted AI科技大本营
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了激光雷达与相机:哪个最适合自动驾驶汽车?相关的知识,希望对你有一定的参考价值。


自动驾驶汽车行业专家之间正在进行的辩论是LiDAR(光检测和测距)或相机是否最适合SAE 4级和5 级驾驶,争论的焦点在于是否将 LiDAR 与相机系统一起使用,或者只使用没有 LiDAR 的相机系统。LiDAR 的支持者包括 Waymo、Cruise、Uber 和 Velodyne。特斯拉对 LiDAR 的支持最少,而支持相机系统。哪个是最好的解决方案?答案是哪个更擅长识别物体和识别它们。自动驾驶汽车需要有一种方法来识别它在路上看到的东西,这个比那个好吗?

特斯拉似乎寡不敌众,有更多公司和开发商支持 LiDAR。埃隆·马斯克(Elon Musk)解释了他在特斯拉汽车模型中不包括激光雷达的原因。你们不会在 Model 3 或 Model S 上找到 LiDAR,但你们会在 Waymo 的机器人出租车上看到它。到目前为止,这两种技术都没有被普遍接受为自动驾驶汽车的解决方案,因为道路上还没有达到 4 级或 5 级状态的全自动驾驶汽车。


激光雷达
LiDAR 的使用不仅限于自动驾驶汽车,它具有多种应用,包括气象学、地震学、地质学和大气物理学等。LiDAR 使用光脉冲来检测物体,就像雷达使用无线电波的工作原理一样。这些脉冲可以确定物体的距离和范围,为自动驾驶汽车提供急需的数据。例如,为了避免碰撞,LiDAR 可以检测到物体的距离并施加刹车以减慢车辆速度。LiDAR 在测量距离方面是一项经过验证的技术,因此工程师将其用于包括自动驾驶汽车在内的不同应用。
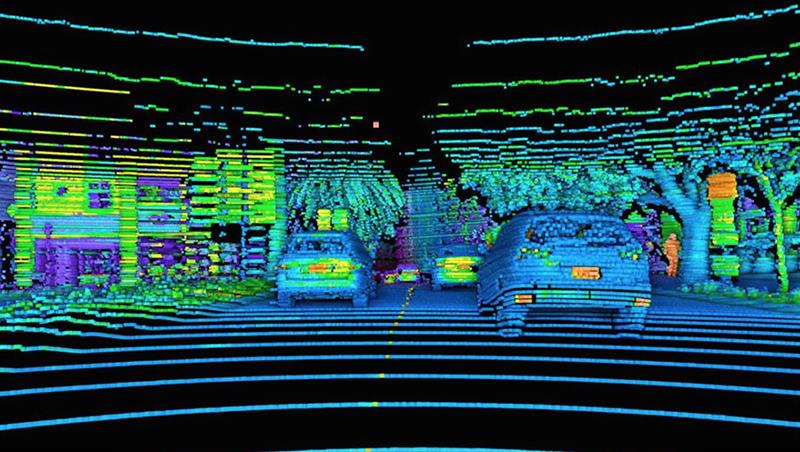
LiDAR 可以帮助自动驾驶汽车根据从光脉冲中接收到的读数创建视觉地图。LiDAR 系统每秒发送数千个脉冲,使用车载软件创建 3D 地图,为汽车提供有关其周围环境的信息。这提供了 360 度视图,有助于汽车在任何类型的条件下行驶。LiDAR 与自动驾驶汽车中的相机配合使用,因此它们本身并不是一个独立的解决方案。

相机
如果你们要像人类一样开车,那么对物体进行视觉识别就是你们要走的路。这是使用相机系统的主要论据。相机提供的图像可供使用 AI 的软件进行高精度分析。特斯拉车型上的相机被其 Autopilot 自动驾驶功能用于提供周围环境的 360 度视图。它完全是视觉的,不依赖于像 LiDAR 那样的测距和检测。
相机不使用光脉冲,而是使用从镜头中的光学元件返回到机载软件的视觉数据进行进一步分析。随着神经网络和计算机视觉算法的发展,可以在汽车行驶时识别物体以提供汽车信息。这有助于汽车避免碰撞、在交通拥堵时减速、安全地变道,甚至可以使用OCR(光学字符识别)读取道路或高速公路上的标志上的文字。到目前为止,特斯拉已经表明,通过使用相机,自动驾驶汽车可以在没有激光雷达的情况下运行。


优点
Elon Musk 称赞相机是最可靠的视觉系统。它在视觉识别方面有更好的优势,配合人工智能识别道路上的物体。它还可以从道路标志中读取文本,这在自动驾驶汽车必须注意绕路和前方道路工作的情况下非常重要。特斯拉汽车上的相机使用光学与计算机视觉相结合,提供计算成像,连续分析相机上的图像。
LiDAR 系统使用光脉冲在虚拟地图上实时绘制点。自动驾驶汽车或自动驾驶汽车可以使用这些数据来安全导航并避免撞到物体。能够确定物体及其距离是使用 LiDAR 的强项。具有高度准确性和可靠性的 LiDAR 系统可以提高安全性,这是有关自动驾驶汽车的主要讨论点之一。

缺点
激光雷达因即使在恶劣的天气条件下也能看到物体而受到称赞,但它并不总是可靠的。LiDAR 受波长稳定性和检测器灵敏度的影响。激光的波长会受到温度变化的影响,而较差的 SNR(信噪比)会影响 LiDAR 探测器中的传感器。LiDAR 也更昂贵,需要更多空间才能在汽车上实施,因此它往往会使自动驾驶汽车看起来更笨重。LiDAR 的另一个问题是视觉识别,这是相机更擅长的。LiDAR 需要在软件中进行更多的数据处理来创建图像和识别对象。
相机虽然作为视觉系统更可靠,但不具备 LiDAR 的范围检测功能。虽然相机的成像效果很好,但作为一个独立的系统,它可能还不够。这就是为什么特斯拉还使用包括雷达在内的其他传感器来检测范围和距离的原因。批评者说,相机仍然不能很好地看到以避免危险,尤其是在涉及天气条件的情况下。他们需要能够在任何类型的条件下准确地看到,就像人类司机一样。
如果自动驾驶汽车要合法上路,安全将成为首要问题。使用这两种系统的自动驾驶汽车已经发生了死亡事故。使用 Autopilot 的特斯拉司机曾发生过事故,包括在美国高速公路上发生的死亡事故。其他时候是因为分心驾驶,因为这些汽车不是完全自动驾驶的,仍然需要驾驶员的注意力。优步在 2018 年成为新闻,当时其一辆自动驾驶汽车撞上了一名当场死亡的行人。这些汽车还没有完全自动驾驶,因此驾驶员也可能会被忽视。这些都是自动驾驶汽车发展的陷阱。

结论
如果安全是我们的首要考虑,那么融合 LiDAR 和相机系统最佳元素的传感器融合将是必要的。LiDAR 和其他传感器(包括相机)的组合可以为公共安全提供很多帮助。如果视觉系统(例如软件、传感器)对于公共安全而言变得更加准确和可靠,则 LiDAR 可能变得不必要。毕竟,自动驾驶汽车的主要原因之一是尽量减少人为错误造成的事故。
自动驾驶汽车中 LiDAR 和相机之间的共同点是软件。这两个系统都使用机器学习和神经网络等人工智能技术来分析数据。随着算法变得更好,结果还应该提高识别物体的准确性,并使自动驾驶汽车做出更好的决策。这可能意味着事故和安全驾驶之间的区别。
这不是一个有简单答案的简单问题。在关键决策方面,机器的思维方式与人类不同。这需要为软件开发人员提供更多的数据和培训来改进。当前的基础设施可能也需要修改,以适应自动驾驶汽车(例如 V2X)。除非自动驾驶汽车显示一致的数据表明使用一种技术而不是另一种技术,否则争论仍然存在。

以上是关于激光雷达与相机:哪个最适合自动驾驶汽车?的主要内容,如果未能解决你的问题,请参考以下文章