IMU模块中6轴9轴包含哪些模块?
Posted ybhuangfugui
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了IMU模块中6轴9轴包含哪些模块?相关的知识,希望对你有一定的参考价值。
常被朋友们问起 到底啥是陀螺仪模块,IMU模块,惯导模块。这里以我的理解给大家一个通俗的解释:
说明:以下说法是为了不改变原意的情况下方便快速理解的比较通俗的解释,不是正式定义。
6轴,9轴,IMU,VRU和AHRS分别指的是什么?
6轴9轴的概念很好理解:说白了就是模块上装了哪些,多少传感器
6轴 : 三轴(XYZ)加速度计 + 三轴(XYZ)陀螺仪(也叫角速度传感器)
9轴 : 6轴 + 三轴(XYZ)磁场传感器
6轴模块可以构成VRU(垂直参考单元)和IMU(惯性测量单元),9轴模块可以构成AHRS(航姿参考系统)
IMU: 惯性测量单元,可以输出加速度和角速度。并不输出姿态角等其他信息
VRU: IMU的基础上内置姿态解算算法,可以输出姿态信息。
静止状态下加速度计可以测得重力矢量并作为参考,所以静态下俯仰横滚角不会漂移而且精度比较高,然而由于航向角与重力垂直,没有绝对参考,水平方向上的航向角误差会随着时间慢慢变大,变的越来越不准 。
当模块运动时,加速度计测量的不仅仅只有重力,还有其他运动加速度(有害加速度),所以模块运动中是不能用重力矢量作为参考修正俯仰横滚角的。一个简单的结论就是:如果模块长时间处于大机动状态,那么三个欧拉角误差都会随时间变大(越来越不准),一旦静止,俯仰横滚角会被重新"拉"回到正确的位置,而航向角因为没有参考则不会得到校正。
AHRS: VRU的基础上修改算法,可以解算被测物体的全姿态,包括绝对的航向角(与地磁北极的夹角),因为要用到地磁传感器,所以必须是9轴模块。另外室内由于地磁场畸变非常严重,AHRS 在室内也很难获得准确的绝对航向角。
GPS:美国的全球卫星定位系统:Global Position System翻译过来就叫全球卫星定位系统。也是因为GPS是第一个出来的,老美命名的也比较骄傲,没有考虑后面还有其他国家也做出来卫星定位系统,可以这样理解:GPS是GPS牌GPS,后面还有中国的北斗牌GPS,毛子的格洛纳斯牌GPS等。
GNSS: 全球卫星定位系统,GPS,北斗,格洛纳斯等系统的总称,每一个系统叫做一个"星座"
GNSS/INS: 卫星/惯导组合导航系统
以下是正式定义:(不感兴趣可以不看了)
IMU 惯性测量单元(Inertial Measurement Unit) 是测量物体三轴角速度和加速度的设备。一个IMU内可能会装有三轴陀螺仪和三轴加速度计,来测量物体在三维空间中的角速度和加速度。严格意义上的IMU只为用户提供三轴角速度以及三轴加速度数据。
VRU 垂直参考单元(Vertical Reference Unit)是在IMU的基础上,以重力向量作为参考,用卡尔曼或者互补滤波等算法为用户提供有重力向量参考的俯仰角、横滚角以及无参考标准的航向角。通常所说的6轴姿态模块就属于这类系统。航向角没有参考,不管模块朝向哪里,启动后航向角都为0°(或一个设定的常数)。随着模块工作时间增加,航向角会缓慢累计误差。俯仰角,横滚角由于有重力向量参考,低机动运动情况下,长时间不会有累积误差。
AHRS 航姿参考系统(Attitude and Heading Reference System)AHRS系统是在VRU的基础上增加了磁力计或光流传感器,用卡尔曼或者互补滤波等算法为用户提供拥有绝对参考的俯仰角、横滚角以及航向角的设备,这类系统用来为飞行器提供准确可靠的姿态与航行信息。我们通常所说的9轴姿态传感器就属于这类系统,因为航向角有地磁场的参考,所以不会漂移。但地磁场很微弱,经常受到周围带磁物体的干扰,所以如何在高机动情况下抵抗各种磁干扰成为AHRS研究的热门。
GNSS/INS 这是一种组合导航系统,顾名思义这种系统是利用全球卫星导航系统(Global Navigation Satellite System 简称GNSS,它是GPS,北斗,GLONASS、GALILEO等系统的统称) 与惯性导航(Inertial Navigation System)各自的优势进行算法融合,为用户提供更加精准的姿态及位置信息。
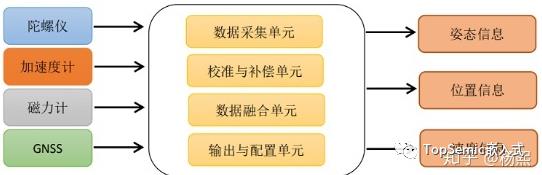
下图是组合导航系统的一个基本的框图,它以加速度计、陀螺仪、磁力计、气压计、GNSS等作为基本输入,利用融合算法输出用户所需要的姿态信息、位置信息以及速度信息。
模块可以积分计算速度和位置么?
理论可以,实际不行(没有意义)。
如果没有其他方式纠正偏差(比如GPS),那么位置会很快发散,比如HI226模块,加速度积分得速度,速度积分得位置。这样二次积分下来,就算是静止条件下,1min也会飘几十米。高速运动/机动飘出1KM也是有可能的。真正纯惯导解算得到稳定的位姿应用的都是高端IMU(光纤,激光陀螺等)一般都价值不菲。
模块会受电机等强磁干扰么?
6轴一点都不会,9轴肯定会,而且非常大。所以9轴模式一般不适用于机器人等周围有磁性物质的场合。
解释一下航向角飘移现象?
6轴模块航向角飘移是必然的,只是程度的高低不同而已,器件决定性能,算法不是万能。需要注意的是所有姿态模块都需要上电静止1s左右以获得陀螺零偏,否则航向角飘移会更严重,详见产品手册描述。
9轴模块需要配置为9轴模式,并且地磁经过校准,并且无地磁空间畸变干扰的环境下才能输出稳定无飘移的航向角,室内环境下:办公桌周围,厂房,实验室,仪器设备旁的区域空间磁场畸变非常严重,9轴模式下航向角指北精度一般都比较差,初次使用可以到户外先测试模块性能,在拿回室内比较。
没有转台等专业设备,如何简单快速的定性评估动态精度?
(这里是定性分析,无法给出定量结果): 一个简单的定性分析方法:将模块水平放置,稳定后拿起模块进行随机机动运动(慢慢动,不要太剧烈,不要超出陀螺量程),运动一定时间(2-5min)后回到水平位置,这时候会发现俯仰横滚角有一个"回正"过程。这是由于运动中加速度计测量的不再只有重力矢量,所以无法提供俯仰横滚角的绝对参考,只能靠陀螺积分来递推姿态,随着时间流逝,纯陀螺积分姿态必然会有误差。重新水平放置后,模块处于静止状态,加速度计测量的又只有重力矢量,所以又可以继续为俯仰横滚角提供绝对参考,所以才有"回正"过程。所以,从"回正"的大小幅度(而不是快慢)上就可以简单定性的比较这块产品的陀螺性能。回正幅度越大说明陀螺在运动过程中累计的误差越大。
另外,这个"回正"的过程如果只是通过看俯仰横滚数值是很难用肉眼看出来的,必须借助上位机使用曲线或者可视化仪表盘观察。
最后,推荐关注这位朋友的公众号:
以上是关于IMU模块中6轴9轴包含哪些模块?的主要内容,如果未能解决你的问题,请参考以下文章