无人机蜂群拦截系统作战构想与关键技术&论文解读
Posted 阿木实验室
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了无人机蜂群拦截系统作战构想与关键技术&论文解读相关的知识,希望对你有一定的参考价值。
@toc
文献链接:
无人机蜂群拦截系统作战构想与关键技术&论文解读 刘文章 张 骞,赵梓涵
时事背景:
在 2020年纳卡冲突中,阿塞拜疆使用无人机攻击 亚美尼亚地面坦克及士兵
无人机蜂群拦截网络系统概念:
- 在未来作战中,为突破防御系统,达成作战效果,不仅会有针对重点目标的精确打击,还可能存在
“饱和式”的空天打击、无人机蜂群袭击graph BR A[重要目标] --> B(自杀式无人机蜂群) A[重要目标] --> C(火箭弹) A[重要目标] --> D(空飘气球) A[重要目标] --> E(非常规手段)当前世界主要国际防空力量均是按照体系作战思想构建
graph BR A[体系作战思想] --> B(远程武器) A[体系作战思想] --> C(中程武器) A[体系作战思想] --> D(近程武器) A[体系作战思想] --> E(末端武器) - 该体系作战在
远中近程防空武器(S300)于末端防空武器存在一定的火力空白美国海军研究生学院Loc Pham在 2012年发表 的 《无人机蜂群攻击》 曾探讨了防空系统对蜂群作战 的防御问题。文章显示,即使是世界上最先进的防空 体系之一的海面“宙斯盾”系统(装备了干扰器、诱饵 弹^ '标准”系列防空导弹、127 mm舰炮、2 座 “密集阵”近防武器系统),面对5~10架从各个方向来袭的无人 机蜂群攻击,也显得力不从心,根本无法做到全部有效
无人机蜂群拦截系统:
无人机 蜂群拦截系统是在无人机蜂群技术的基础上,设计一 种可实施高度自主拦截的无人机蜂群拦截系统.
graph BR A[拦截无人机] --> B(可自主组网控制 终端) 六边形空间错位矩阵排列结构 A[拦截无人机] --> C(灵巧式高爆自毁炸弹) A[拦截无人机] --> D(可探测来袭目标的模块)系统通过采用“无人机蜂群对抗无人 机蜂群'、“无人机蜂群集中毁伤巡航导弹”的策略 应对敌可能采取的
多弹种、高密度·全方位饱和式攻击无人机拦截系统组成
- 据系统作战需求,为提高整体拦截效能,无人机蜂群拦截系统根据任务职能区分,采取群 组编队的方式
- 构建以
拦截群为核心,侦察群、反辐射 群、诱饵群、电子对抗群(干扰群)、补充群负责协同的空中无人机蜂群拦截系统graph BR A[拦截群] --> B(侦察群) A[拦截群] --> E(反辐射群) A[拦截群] --> C(电子对抗群_干扰群) A[拦截群] --> D(诱饵群) A[拦截群] --> F(补给群)
拦截群
拦截群:正六边形是能够不重叠地铺满一个平 面的三种正多边形(正三角形、正方形和正六边形)- 六边形以最小量的材料占有最大面积m 。拦截群通过采用“六边形空间错位矩 阵”的排列结构,前后交错排列,可实现拦截效率的最 大化。
- 拦截群进行模块化编组,每个模块配置拦截无 人机若干,前后分层配置,每层在不同平面上,且相邻 两层之间留有一定的安全距离
- 每架无人机的位置在 组网前根据编号定位,确保任务规划到具体无人机。
- 整个六边形错位矩阵拦截网的分层数量、每层拦截网 占有的无人机数量,以及每层拦截网之间的距离可根据来袭目标携带弹药的杀伤半径进行调整,确保无人 机和无人机、拦截层和拦截层之间距离适当,防止出现 “一弹引爆多机”的问题
- 截群在预定区域展开后,通过地面雷达或无人 机侦察群不间断地向拦截群传输和共享指令,随时调 整拦截群位置。
- 为有效应对各类攻击,提高拦截效率, 如图3 所示,可采用多层布防、多单元组合布防,以及 多层多单元组合布防等方式来增加拦截面积和拦截纵深。
侦察群:
侦察群:侦察群主要由搭载合成孔径雷达、多 功能相控阵雷达等设备的无人机群组成,可部署在拦截系统前侧.- 主要任务是与地面雷达系统协同判断敌 飞行物的类别、编队形式、速度、方位、高度、携带的武 器和精确计算敌飞行物的飞行轨迹等.
- 并将敌飞行物 的相关信息实时传送给拦截群。
反辐射群:
反辐射群:反辐射群配置反辐射无人机若干, 可部署在侦察群后侧- 主要任务是根据敌雷达信号进 行攻击,摧毁飞行物的雷达;
- 如果敌飞行物为无制导能 力的火箭弹等武器,则反辐射群不工作。
电子对抗群(干扰群):
电子对抗群(干扰群)配置电抗无人机若干,可部署于侦察群后侧- 主要任务 是防敌电磁干扰,同时压制和干扰敌飞行物通信信号
诱饵群:
诱饵群:诱饵群配置各型诱饵无人机若干,可部署于拦截群前侧- 主要任务是诱导敌空袭目标偏离 攻击目标和攻击拦截网,实现保护我方重要目标的 作用。
补充群:
补充群:补充群主要由空中补充群和地面补充 群组成- 当拦截网络中的无人机出现损伤和自毁后,能根据无人机蜂群指挥控制网络的指令自主派遣无人机 补充至相应的战斗位置,保障任务继续执行。
无人机蜂群拦截系统作战构想:
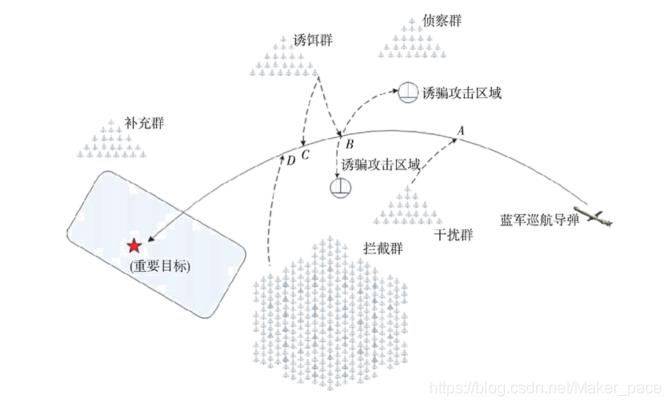
拦截无人机蜂群
无人机蜂群攻击具备数量多、机动灵活等特点,但其突出弱点为易受电子干扰- 干扰群脱离原 有编队突进至4 点(敌无人机蜂群前侧)并迅速向敌蜂 群两侧散开,与之保持一定距离进行干扰压制;
- 反辐射群随后突进至8 点,灵活锁定敌无人机蜂群通讯中枢 部分进行打击;
- 诱饵群至C 点发出假的通信和雷达信 号,持续诱导敌剩余无人机向拦截群飞行; 拦截群梯次配置至D点,与补充群配合
拦截巡航导弹:
- 巡航导弹具有飞行速度快、高度低、机动灵活等特点,但其易受电子干扰及诱饵欺骗
- 当敌巡航导弹进入我方侦察半径时,侦察群通过自身雷达、地面雷达和预警机配合持续锁定目标
- 预测巡航导 弹的弹道轨迹,并将弹道测算的信息传输至拦截群;干 扰群脱离原有编队突进至4 点(敌巡航导弹前侧)并迅 速向巡航导弹两侧散开,与之保持一定距离进行干扰 压制
- 诱饵群发出假的雷达和通信信号,在 B 点和C 点 持续诱导敌巡航导弹向拦截群或预定诱骗攻击区域飞 行;
- 拦截群高速机动到预定的飞行轨道,展开战斗队形 对巡航导弹预定飞行空域执行重点拦截
- 必要时,可在诱骗攻击区域实施打击
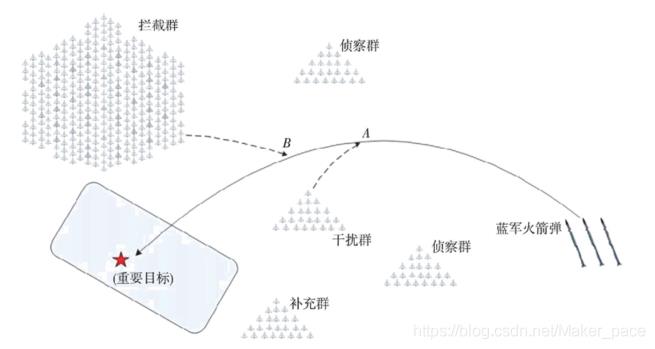
拦截炮弹(火箭弹):
- 炮弹(火箭弹)具有无制导装置,密集度大的特点.
- 拦截系统无法破坏其雷达、通信和控制设备,但通 过空地雷达可以精准预测其飞行轨迹。
- 当敌炮弹(火箭弹)进入我方侦察半径时,侦察群 通过雷达测算弹道并与地面雷达和预警机配合持续 锁定目标,预测炮弹(火箭弹)的弹道轨迹。
- 拦截群 可提前机动并集中部署到炮弹(火箭弹)的预定轨迹 上,展开战斗队形对炮弹(火箭弹)可能飞过的空域 执行重点拦截。
- 当炮弹(火箭弹)数量较大时,补充 群及时支援拦截群,并可呼叫地面防空系统与拦截群 协同进行拦截。
拦截空飘气球:
空飘气球具有目标明显、速度较慢等特点- 可采取 类似拦截炮弹的方法进行拦截。但由于空飘气球可能 数量多、成本低、易摧毁,可增编部分攻击型无人机将 更具经济性
无人机蜂群拦截系统关键技术及可行性分析
- 无人机蜂群拦截系统构建需要在充分考虑可能面 临的来袭目标特点的基础上,综合运用一系列相关关 键技术
graph BR
A[关键技术] --> B(平台研制)
A[关键技术] --> C(系统架构)
A[关键技术] --> D(集群感知与信息融合)
A[关键技术] --> E(集群控制与群体智能)
A[关键技术] --> F(任务规划)
A[关键技术] --> G(蜂群投放及回收补充)平台研制:
为实现拦截系统的有效运行,达成 相应的作战效费比,无人机平台在研发和制造技术上 需要具备以下条件
先进的研发能力和制造工艺
由于拦截系统主要 以蜂群组网,通过无人机自爆来拦截敌“饱和式攻击”, 无人机平台必须能够规模量产,且有效控制成本,确保 达成相应的作战效费比。
足够的生产能力和成本控制
由于拦截系统主要 以蜂群组网,通过无人机自爆来拦截敌“饱和式攻击”, 无人机平台必须能够规模量产,且有效控制成本,确保 达成相应的作战效费比。
系统架构:
- 无人机蜂群拦截是集巡航、侦察、拦截、控制等多 种行动为一体的复杂任务,拦截系统必须进行科学的 系统架构和高效的集群协同
- 以通过整体效能来应对高度对抗性、高度动态性、高度不确定性的战场环境。
系统作战需求:
拦截系统应具备侦察、拦截、反辐射、抗干扰、诱骗、自我补充等功能,
graph BR
A[拦截系统] --> B(侦察)
A[拦截系统] --> C(拦截)
A[拦截系统] --> D(反辐射)
A[拦截系统] --> E(抗干扰)
A[拦截系统] --> F(诱骗)
A[拦截系统] --> G(自我补充)以实现对来袭目标从发现、引诱到拦截的作战全流程 以及自身防护和系 统补充。为提高拦截系统的
鲁棒性和容错性,
分布式人工智能系统中的多智能体系统(MAS):
- 该系统核心思想是“分而治之”,即将整个拦截系统分解 为各个相对独立的子系统
- 子系统之间通过相互协作 完成高度复杂的拦截任务。子系统之间通过相互协作 完成高度复杂的拦截任务。
集群感知与信息融合:
集群感知与信息融合是无人机蜂群拦截系统控制 决策的重要依据
集群感知
- 集群感知是指无人机蜂群基于
机载传感器(如多功能相控阵雷达),通过无人机之间相互协同以获得更广的探测范围、更高的定位精度
- 集群感知包括对
外部环境的协同观测和无人机蜂群内部的互感能力。
信息融合
- 信息融合主要是指无人机平台之间
(如蜂群和蜂群之间,蜂群和地面指控系统、雷达探测系统之 间等)通过数据链路传递和共享目标信息、平台信息、情报指令等 进而获得任务区域内准确、完整的全局信 息- 通常要求有可靠的
通信中继卫星、无线接入网和信息处理传输网络。
- 比如当无人机蜂群在预定任务区域 待命预警时,
地面雷达可提前将来袭目标的类别、数量、编队形式、速度、方位、高度等基本信息共享传输给无人机蜂群。- 待来袭目标进入无人机蜂群探测范围 后,蜂群进一步协同测算和精确化其飞行信息,并将信 息传递到控制终端,通过计算确定
拦截无人机排列结构及引爆时间,最终完成任务。
集群控制与群体智能:
集群控制与群体智能是无人机蜂群拦截系统成功 运行的核心无人机个体能力通常较弱,但通过借助蚁群算法(ACA/ACO) 、粒子群算法(PSO) 等集群控制算法
,无人机蜂群可集有限智能个体的协同合作为 集体智能,实现自主编队、分组避障,部分毁伤条件下 重构编队等功能。
拦截系统中的无人机应遵循“精准、 立体、快速、有序”的原则,
graph BR
A[拦截系统无人机] --> B(精准)
A[拦截系统无人机] --> C(立体)
A[拦截系统无人机] --> D(快速)
A[拦截系统无人机] --> E(有序)
在空袭目标来袭的路径上按 照某种排列方法展开形成空中拦截网,使拦截无人机 的拦截效能最优化
当空袭目标变化飞行轨道时,拦截 无人机蜂群通过自身探测系统、地面雷达和其他无人 机群测算其空中实时轨迹
自主修正并快速编队机动 到相应位置;部分毁伤条件下,无人机群自主重构修补空中拦截网。
任务规划 :
- 无人机蜂群拦截系统任务规划是完成拦截任务的关键
- 主要指根据·无人机性能·、拦截任务和战场环境等 因素约束,为蜂群中的无人机进行任务规划和组合优化,以避免资源冲突,实现整体协同和全局最优'
- 如拦截无人机群应如何进行排列组合,实现拦截面积 和拦截纵深的最大化;无人机蜂群
- 根据侦察结果,如何 进行任务的动态分配,实施干扰、诱导、拦截等;当来袭 目标数量较多
- 如何进行任务规划,实现拦截效果最大化等。
蜂群投放及回收补充 :
- 据现代战争的多域性特点,无人机蜂群投放必 须具备全域、快速、高效、机动、精准等特点
投放方式:
- 在现有的 武器装备体系和技术支撑下,除采取传统的固定架投 放外,还可取车(舰)载投放、战机(战斗机、运输机、直 升机)投放、火箭投放等方式。
- 由于无人机携带自爆模 块,且在任务中由于自爆而导致数量减少。
- 当无人机蜂 群执行完任务时,无人机必须能够自主返航进行数量 补充和能源补给,以确保拦截系统的经济性、完整性和安全性。
可行性分析:
无人机蜂群作为近些年来迅速崛起并快速发展的 无人化技术,集平台研制、智能感知、网络通信、导航定 位、集群组网、自主协同、智能弹药等技术于一体
无人机作战优势:
具有无人机成本低、群体数目大、智能化程度高等显著优势,
无人机作战劣势:
其劣势则主要体现为速度慢、航程短、探测能力差、抗 干 扰 能 力 有 限 等 随 着 美 军 “小精灵”项目'间和 "灰山鹑”微型无人机项目的研究论证, 以及我国电科 集团电科院在2020年 9 月成功进行的200架固定翼无 人机集群作战试验〔侦,无人机蜂群拦截系统构建逐步 具备了一定的可行性。
- 1) 固定翼无人机平台技术基本 可实现高航速、长航程、可回收等功能,如 “小精灵”无 人机和中国电科集团无人机均采用机身细长,机翼可 折叠,装备小型涡扇发动机,“小精灵”无人机作战半径 926 km,可空中巡逻3 h ,有效载荷54. 5 kg,最大速度不 低于Ma = 0.8W o
- 2) 无人机蜂群高效投放、智能感知、 集群控制、信息共享、任务规划与执行等技术已基本趋 于可用,美军公布的“灰山鹑”微型无人机蜂群演示和 中国电科集团无人机蜂群作战试验已基本实现无人机 多方式投放、精确编队、侦察监视、干扰压制、自主察打 等功能。
- 3) 相较于传统防空体系,无人机蜂群拦截系 统具有机动灵活、智能高效等特点,且在应对“饱和式 攻击”方面具有突出优势,通过与传统防空体系配合可 以增强重点目标的防护能力
无人机作战面临问题:
- 我们也应看到,无人机蜂群拦截系统的构建 仍然面临一些问题
- 首先,在平台研制技术上,需要在 无人机性能和研发制造成本之间做好平衡,确保既要 满足基本的作战需求,又有很好的作战效费比;
- 其次, 由于拦截的实时性要求,无人机蜂群拦截系统需要具备科学完备的系统架构,成熟的集群感知与信息融合、 集群控制与群体智能、任务规划等能力,这需要深入研 究和反复论证,才能确保拦截的成效和系统的稳定性;
- 再次,在系统安全性问题上,因拦截无人机携带灵敏高 效炸药战斗部,系统运行时存在一定危险,使用时要时 刻关注无人机的飞行状态,将不适合拦截的区域作为 禁飞区输入控制程序中,避免拦截后的残骸或仪器故 障失灵落入人员密集区域造成损失
结束语:
无人机蜂群拦截系统的构建还存在诸多难点,但机遇 与挑战往往并存。我国应加强无人机蜂群作战的前沿 技术研究和大胆创新,强化军民融合等国家战略推动 关键技术的进步,进而获得无人作战领域的“非对称” 优势。
本文由博客一文多发平台 OpenWrite 发布!
以上是关于无人机蜂群拦截系统作战构想与关键技术&论文解读的主要内容,如果未能解决你的问题,请参考以下文章