路径规划基于matlab人工蜂群算法多无人机二维路径规划含Matlab源码 1235期
Posted 紫极神光
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了路径规划基于matlab人工蜂群算法多无人机二维路径规划含Matlab源码 1235期相关的知识,希望对你有一定的参考价值。
一、人工蜂群算法简介
1 蜜蜂采蜜
自然界中的蜜蜂总能在任何环境下以极高的效率找到优质蜜源,且能适应环境的改变。蜜蜂群的采蜜系统由蜜源、雇佣蜂、非雇佣蜂三部分组成,其中一个蜜源的优劣有很多要素,如蜜源花蜜量的大小、离蜂巢距离的远近、提取的难易程度等;雇佣蜂和特定的蜜源联系并将蜜源信息以一定概率形式告诉同伴;非雇佣蜂的职责是寻找待开采的蜜源,分为跟随蜂和侦查蜂两类,跟随峰是在蜂巢等待而侦查蜂是探测蜂巢周围的新蜜源。蜜蜂采蜜时,蜂巢中的一部分蜜蜂作为侦查蜂,不断并随机地在蜂巢附近寻找蜜源,如果发现了花蜜量超过某个阈值的蜜源,则此侦査蜂变为雇佣蜂开始釆蜜,采蜜完成后飞回蜂巢跳摇摆舞告知跟随峰。摇摆舞是蜜蜂之间交流信息的一种基本形式,它传达了有关蜂巢周围蜜源的重要信息如蜜源方向及离巢距离等,跟随峰利用这些信息准确评价蜂巢周围的蜜源质量。当雇佣蜂跳完摇摆舞之后,就与蜂巢中的一些跟随蜂一起返回原蜜源采蜜,跟随蜂数量取决于蜜源质量。以这种方式,蜂群能快速且有效地找到花蜜量最高的蜜源。
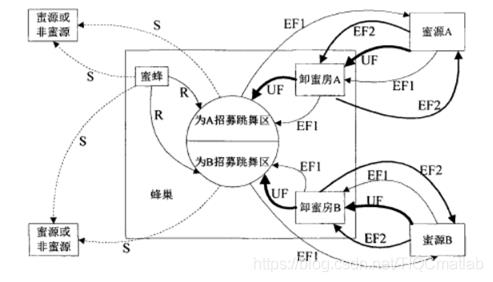
蜜蜂采蜜的群体智能就是通过不同角色之间的交流转换及协作来实现的。具体采蜜过程如图所示。在最初阶段,蜜蜂是以侦查蜂的形式出现,且对蜂巢周闱的蜜源没有任何了解,由于蜜蜂内在动机和外在的条件不同侦查蜂有两种选择:①成为雇佣蜂,开始
以上是关于路径规划基于matlab人工蜂群算法多无人机二维路径规划含Matlab源码 1235期的主要内容,如果未能解决你的问题,请参考以下文章
路径规划基于蚁群算法求解三维多无人机路径规划matlab源码
三维路径规划基于matlab粒子群算法融合鸡群算法多无人机三维路径规划含Matlab源码 1792期
三维路径规划基于matlab粒子群算法无人机三维路径规划含Matlab源码 192期