STM32入门开发: 编写DS18B20温度传感器驱动(读取环境温度支持级联)
Posted DS小龙哥
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了STM32入门开发: 编写DS18B20温度传感器驱动(读取环境温度支持级联)相关的知识,希望对你有一定的参考价值。
一、环境介绍
编程软件: keil5
操作系统: win10
MCU型号: STM32F103C8T6
STM32编程方式: 寄存器开发 (方便程序移植到其他单片机)
温度传感器: DS1820
DS18B20是一个数字温度传感器,采用的是单总线时序与主机通信,只需要一根线就可以完成温度数据读取;
DS18B20内置了64位产品序列号,方便识别身份,在一根线上可以挂接多个DS18B20传感器,通过64位身份验证,可以分别读取来至不同传感器采集的温度信息。
二、DS18B20介绍
2.1 DS18B20 的主要特征
1. 全数字温度转换及输出。
2. 先进的单总线数据通信。
3. 最高 12 位分辨率,精度可达土 0.5 摄氏度。
4. 12 位分辨率时的最大工作周期为 750 毫秒。
5. 可选择寄生工作方式。
6. 检测温度范围为–55° C ~+125° C (–67° F ~+257° F)
7. 内置 EEPROM,限温报警功能。
8. 64位光刻 ROM,内置产品序列号,方便多机挂接。
9. 多样封装形式,适应不同硬件系统。
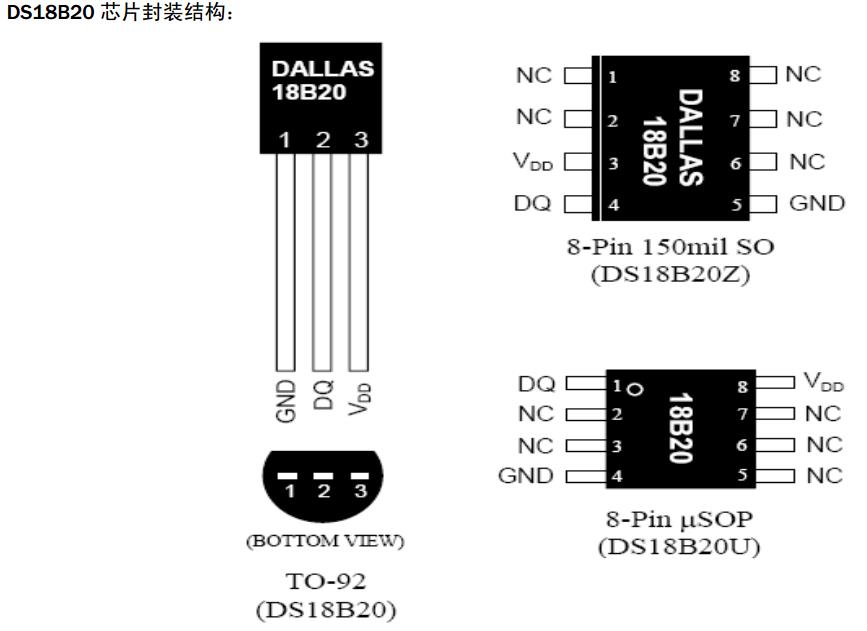
2.2 DS18B20 引脚功能
GND 电压地
DQ 单数据总线
VDD 电源电压
NC 空引脚
2.3 DS18B20 工作原理及应用
DS18B20 的温度检测与数字数据输出全集成于一个芯片之上,从而抗干扰力更强。其一个工作周期可分为两个部分,即温度检测和数据处理。
18B20 共有三种形态的存储器资源,它们分别是:ROM 只读存储器,用于存放 DS18B20ID 编码,其前 8 位是单线系列编码(DS18B20 的编码是19H),后面 48 位是芯片唯一的序列号,最后 8 位是以上 56 的位的 CRC 码(冗余校验)。数据在出产时设置不由用户更改,DS18B20 一共有 64 位 ROM。
RAM 数据暂存器,用于内部计算和数据存取,数据在掉电后丢失, DS18B20 共 9 个字节 RAM,每个字节为 8 位。第 1、 2 个字节是温度转换后的数据值信息,第 3、 4 个字节是用户 EEPROM(常用于温度报警值储存)的镜像。在上电复位时其值将被刷新。第 5 个字节则是用户第 3 个 EEPROM的镜像。第 6、 7、 8 个字节为计数寄存器,是为了让用户得到更高的温度分辨率而设计的,同样也是内部温度转换、计算的暂存单元。第 9 个字节为前 8 个字节的 CRC 码。 EEPROM 非易失性记忆体,用于存放长期需要保存的数据,上下限温度报警值和校验数据,DS18B20 共 3 位 EEPROM,并在 RAM 都存在镜像,以方便用户操作。
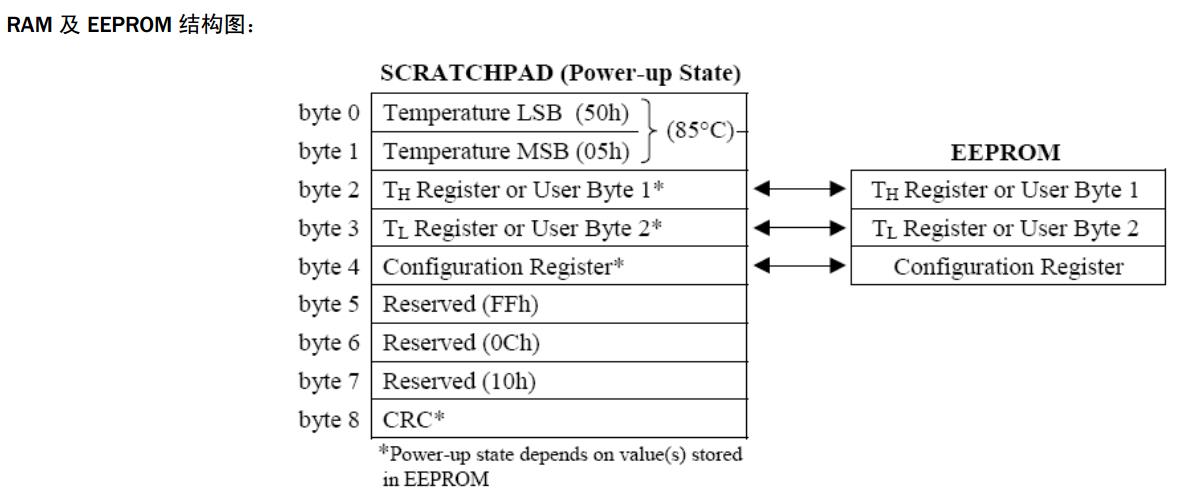
DS18B20默认工作在12位分辨率模式,转换后得到的12位数据,存储在DS18B20的两个8比特的RAM中(最前面的两个字节),二进制中的前面5位是符号位,如果测得的温度大于0,这5位为0,只要将测到的数值乘于0.0625即可得到实际温度;如果温度小于0,这5位为1,测到的数值需要取反加1再乘于0.0625即可得到实际温度。或者使用位运算方式提取温度: 小数位是占用的是低4位,高位是整数位(不考虑负数情况)。
2.4 DS18B20 芯片 ROM 指令表
1. Read ROM(读 ROM) [33H] (方括号中的为 16 进制的命令字)
这个命令允许总线控制器读到 DS18B20 的 64 位 ROM。只有当总线上只存在一个 DS18B20 的时候才可以使用此指令,如果挂接不只一个,当通信时将会发生数据冲突
2. atch ROM(指定匹配芯片) [55H]
这个指令后面紧跟着由控制器发出了 64 位序列号,当总线上有多只 DS18B20 时,只有与控制发出的序列号相同的芯片才可以做出反应,其它芯片将等待下一次复位。这条指令适应单芯片和多芯片挂接。
3. Skip ROM(跳跃 ROM 指令) [CCH]
这条指令使芯片不对 ROM 编码做出反应,在单总线的情况之下,为了节省时间则可以选用此指令。如果在多芯片挂接时使用此指令将会出现数据冲突,导致错误出现。
4. Search ROM(搜索芯片) [F0H]
在芯片初始化后,搜索指令允许总线上挂接多芯片时用排除法识别所有器件的 64 位 ROM。
5. Alarm Search(报警芯片搜索) [ECH]
在多芯片挂接的情况下,报警芯片搜索指令只对附合温度高于 TH 或小于 TL 报警条件的芯片做出反应。只要芯片不掉电,报警状态将被保持,直到再一次测得温度什达不到报警条件为止。
6. Write Scratchpad (向 RAM 中写数据) [4EH]
这是向 RAM 中写入数据的指令,随后写入的两个字节的数据将会被存到地址 2(报警 RAM 之 TH)和地址 3(报警 RAM 之 TL)。写入过程中可以用复位信号中止写入。
7. Read Scratchpad (从 RAM 中读数据) [BEH]
此指令将从 RAM 中读数据,读地址从地址 0 开始,一直可以读到地址 9,完成整个 RAM 数据的读出。芯片允许在读过程中用复位信号中止读取,即可以不读后面不需要的字节以减少读取时间。
8. Copy Scratchpad (将 RAM 数据复制到 EEPROM 中) [48H]
此指令将 RAM 中的数据存入 EEPROM 中,以使数据掉电不丢失。此后由于芯片忙于 EEPROM 储存处理,当控制器发一个读时间隙时,总线上输出“0”,当储存工作完成时,总线将输出“1”。
在寄生工作方式时必须在发出此指令后立刻超用强上拉并至少保持 10MS,来维持芯片工作。
9. Convert T(温度转换) [44H]
收到此指令后芯片将进行一次温度转换,将转换的温度值放入 RAM 的第 1、 2 地址。此后由于芯片忙于温度转换处理,当控制器发一个读时间隙时,总线上输出“0”,当储存工作完成时,总线将输出“1”。在寄生工作方式时必须在发出此指令后立刻超用强上拉并至少保持 500MS,来维持芯片工作。
10. Recall EEPROM(将 EEPROM 中的报警值复制到 RAM) [B8H]
此指令将 EEPROM 中的报警值复制到 RAM 中的第 3、 4 个字节里。由于芯片忙于复制处理,当控制器发一个读时间隙时,总线上输出“0”,当储存工作完成时,总线将输出“1”。另外,此指令将在芯片上电复位时将被自动执行。这样 RAM 中的两个报警字节位将始终为 EEPROM 中数据的镜像。
11. Read Power Supply(工作方式切换) [B4H]
此指令发出后发出读时间隙,芯片会返回它的电源状态字,“0”为寄生电源状态,“1”为外部电源状态。
2.5 DS18B20时序图
2.5.1 DS18B20 复位及应答关系示意图
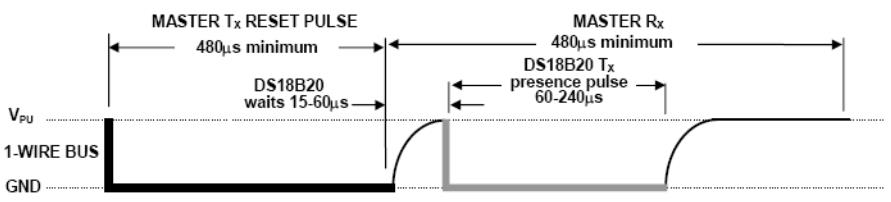
每一次通信之前必须进行复位,复位的时间、等待时间、回应时间应严格按时序编程。
DS18B20 读写时间隙:DS18B20的数据读写是通过时间隙处理位和命令字来确认信息交换的。
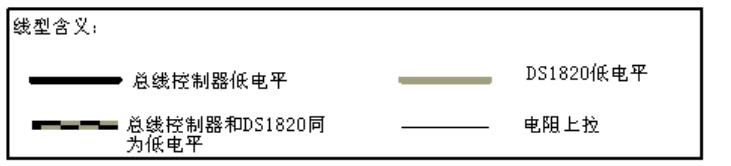
2.5.2 向DS18B20写数据0和数据1
在写数据时间隙的前 15uS 总线需要是被控制器拉置低电平,而后则将是芯片对总线数据的采样时间,采样时间在 15~60uS,采样时间内如果控制器将总线拉高则表示写“1”,如果控制器将总线拉低则表示写“0”。
每一位的发送都应该有一个至少 15uS的低电平起始位,随后的数据“0”或“1”应该在 45uS 内完成。
整个位的发送时间应该保持在 60~120uS,否则不能保证通信的正常。
注意: DS18B20读写数据都是从低位开始传输。
2.5.3 从DS18B20读数据0和数据1
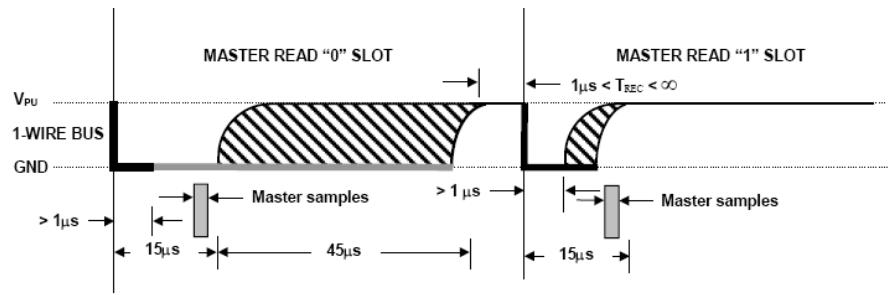
读时间隙时控制时的采样时间应该更加的精确才行,读时间隙时也是必须先由主机产生至少1uS的低电平,表示读时间的起始。随后在总线被释放后的 15uS 中 DS18B20 会发送内部数据位,这时控制如果发现总线为高电平表示读出“1”,如果总线为低电平则表示读出数据“0”。每一位的读取之前都由控制器加一个起始信号。
注意:必须在读间隙开始的 15uS 内读取数据位才可以保证通信的正确。
在通信时是以 8 位“0”或“1”为一个字节,字节的读或写是从低位开始的。
2.5.4 读取一次温度的顺序(总线上只有单个DS18B20情况)
1. 发送复位信号
2. 检测回应信号
3. 发送0xCC
4. 发送0x44
5. 发送复位信号
6. 检测回应信号
7. 写0xcc
8. 写0xbe
9. 循环8次读取温度低字节
10. 循环8次读取温度高字节
11. 合成16位温度数据,处理
三、驱动代码
3.1 DS18B20.c
#include "ds18b20.h"
/*
函数功能: DS18B20初始化
硬件连接: PB15
*/
void DS18B20_Init(void)
{
RCC->APB2ENR|=1<<3; //PB
GPIOB->CRH&=0x0FFFFFFF;
GPIOB->CRH|=0x30000000;
GPIOB->ODR|=1<<15; //上拉
}
/*
函数功能: 检测DS18B20设备是否存在
返回值 : 1表示设备不存在 0表示设备正常
*/
u8 DS18B20_CheckDevice(void) //包含了复位脉冲、检测存在脉冲
{
DS18B20_OUTPUT_MODE();//初始化为输出模式
DS18B20_OUT=0; //产生复位脉冲
DelayUs(750); //产生750us的低电平
DS18B20_OUT=1; //释放总线
DelayUs(15); //等待DS18B20回应
if(DS18B20_CleckAck())//检测存在脉冲
{
return 1;
}
return 0;
}
/*
函数功能: 检测DS18B20设备的存在脉冲
返回值 : 1表示错误 0表示正常
*/
u8 DS18B20_CleckAck(void)
{
u8 cnt=0;
DS18B20_INPUT_MODE();//初始化为输入模式
while(DS18B20_IN&&cnt<200) //等待DS18B20响应存在脉冲
{
DelayUs(1);
cnt++;
}
if(cnt>=200)return 1; //错误
cnt=0;
while((!DS18B20_IN)&&cnt<240) //等待DS18B20释放总线
{
DelayUs(1);
cnt++;
}
if(cnt>=240)return 1; //错误
return 0;
}
/*
函数功能: 写一个字节
首先学会如何写一个位。
*/
void DS18B20_WriteByte(u8 cmd)
{
u8 i;
DS18B20_OUTPUT_MODE(); //初始化为输出模式
for(i=0;i<8;i++)
{
DS18B20_OUT=0; //产生写时间间隙(写开始)
DelayUs(2);
DS18B20_OUT=cmd&0x01; //发送实际的数据位
DelayUs(60); //等待写完成
DS18B20_OUT=1; //释放总线,准备下一次发送
cmd>>=1; //继续发送下一位数据
}
}
/*
函数功能: 读一个字节
首先学会如何读一个位。
*/
u8 DS18B20_ReadByte(void)
{
u8 i,data=0;
for(i=0;i<8;i++)
{
DS18B20_OUTPUT_MODE(); //初始化为输出模式
DS18B20_OUT=0; //产生读时间间隙(读开始)
DelayUs(2);
DS18B20_OUT=1; //释放总线
DS18B20_INPUT_MODE(); //初始化为输入模式
DelayUs(8); //等待DS18B20的数据输出
data>>=1; //高位补0,默认以0为准
if(DS18B20_IN) data|=0x80;
DelayUs(60);
DS18B20_OUT=1; //释放总线,等待读取下一位数据
}
return data;
}
/*
函数功能: 读取一次DS18B20的温度数据
返 回 值: 读取的温度数据
考虑的情况: 总线上只是接了一个DS18B20的情况
*/
u16 DS18B20_ReadTemp(void)
{
u16 temp=0;
u8 temp_H,temp_L;
DS18B20_CheckDevice(); //发送复位脉冲、检测存在脉冲
DS18B20_WriteByte(0xCC); //跳过ROM序列检测
DS18B20_WriteByte(0x44); //启动一次温度转换
//等待温度转换完成
while(DS18B20_ReadByte()!=0xFF){}
DS18B20_CheckDevice(); //发送复位脉冲、检测存在脉冲
DS18B20_WriteByte(0xCC); //跳过ROM序列检测
DS18B20_WriteByte(0xBE); //读取温度
temp_L=DS18B20_ReadByte(); //读取的温度低位数据
temp_H=DS18B20_ReadByte(); //读取的温度高位数据
temp=temp_L|(temp_H<<8); //合成温度
return temp;
}
3.2 DS18B20.h
#ifndef DS18B20_H
#define DS18B20_H
#include "stm32f10x.h"
#include "sys.h"
#include "delay.h"
#include "ds18b20.h"
#include "usart.h"
/*封装接口*/
//初始化DS18B20为输入模式
#define DS18B20_INPUT_MODE() {GPIOB->CRH&=0x0FFFFFFF;GPIOB->CRH|=0x80000000;}
//初始化DS18B20为输出模式
#define DS18B20_OUTPUT_MODE(){GPIOB->CRH&=0x0FFFFFFF;GPIOB->CRH|=0x30000000;}
//DS18B20 IO口输出
#define DS18B20_OUT PBout(15)
//DS18B20 IO口输入
#define DS18B20_IN PBin(15)
//函数声明
u8 DS18B20_CleckAck(void);
u8 DS18B20_CheckDevice(void);
void DS18B20_Init(void);
u16 DS18B20_ReadTemp(void);
u8 DS18B20_ReadByte(void);
void DS18B20_WriteByte(u8 cmd);
#endif
3.3 延时函数
/*
函数功能: 延时us单位
*/
void DelayUs(int us)
{
#ifdef _SYSTICK_IRQ_
int i,j;
for(i=0;i<us;i++)
for(j=0;j<72;j++);
#else
u32 tmp;
SysTick->VAL=0; //CNT计数器值
SysTick->LOAD=9*us; //9表示1us
SysTick->CTRL|=1<<0; //开启定时器
do
{
tmp=SysTick->CTRL; //读取状态
}while((!(tmp&1<<16))&&(tmp&1<<0));
SysTick->VAL=0; //CNT计数器值
SysTick->CTRL&=~(1<<0); //关闭定时器
#endif
}3.4 main.c 调用DS18B20读取温度打印到串口
#include "stm32f10x.h"
#include "ds18b20.h"
u8 DS18B20_ROM[8]; //存放DS18B20的64为ROM编码
int main(void)
{
u16 temp;
USARTx_Init(USART1,72,115200);//串口1的初始化
DS18B20_Init(); //DS18B20初始化
/*1. 读取DS18B20的64位ROM编码*/
//发送复位脉冲、检测存在脉冲
while(DS18B20_CheckDevice())
{
printf("DS18B20设备不存在!\\n");
DelayMs(500);
}
//发送读取64为ROM编码的命令
DS18B20_WriteByte(0x33);
//循环读取64位ROM编码
for(i=0;i<8;i++)
{
DS18B20_ROM[i]= DS18B20_ReadByte();
printf("DS18B20_ROM[%d]=0x%X\\n",i,DS18B20_ROM[i]);
}
while(1)
{
/*2. 同时操作总线上所有的DS18B20开始转换温度*/
DS18B20_CheckDevice(); //发送复位脉冲、检测存在脉冲
DS18B20_WriteByte(0xCC); //跳过ROM序列检测
DS18B20_WriteByte(0x44); //启动一次温度转换(让总线上所有的DS18B20都转换温度)
DelayMs(500); //等待线上所有的DS18B20温度转换完成
/*3. 单个针对性读取每个DS18B20的温度*/
DS18B20_CheckDevice(); //发送复位脉冲、检测存在脉冲
DS18B20_WriteByte(0x55); //发送匹配ROM的命令
for(i=0;i<8;i++) //发送64位编码
{
DS18B20_WriteByte(DS18B20_ROM[i]);
}
DS18B20_WriteByte(0xBE); //读取温度
temp=DS18B20_ReadByte(); //读取的温度低位数据
temp|=DS18B20_ReadByte()<<8; //读取的温度高位数据
printf("temp1=%d.%d\\n",temp>>4,temp&0xF);
printf("temp2=%f\\n",temp*0.0625);
DelayMs(500);
}
}
下面公众号里有全套QT、51单片机、Python、C++、Linux基础教程,欢迎关注:
以上是关于STM32入门开发: 编写DS18B20温度传感器驱动(读取环境温度支持级联)的主要内容,如果未能解决你的问题,请参考以下文章
STM32F4 HAL库开发 -- 温度传感器(DS18B20)
STM32F4 HAL库开发 -- 温度传感器(DS18B20)
STM32F4 HAL库开发 -- 温度传感器(DS18B20)
STM32F4 HAL库开发 -- 温度传感器(DS18B20)