STM32F4 HAL库开发 -- 温度传感器(DS18B20)
Posted 聚优致成
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了STM32F4 HAL库开发 -- 温度传感器(DS18B20)相关的知识,希望对你有一定的参考价值。
参看:《嵌入式-STM32开发指南》第三部分 外设篇 - 第2章 温度传感器DS18B20
这篇文章讲的非常详细了。
一、简介
1、概述
DS18B20 是 DALLAS 最新单线数字温度传感器,新的"一线器件"体积更小、适用电压更宽、更经济。Dallas 半导体公司的数字化温度传感器 DS1820 是世界上第一片支持 "一线总线"接口的温度传感器。
DS18B20采用的单总线协议,也就是只需占用主机一个I/O口,无需其他外围电路,直接将环境温度转换为数字信号,使用户可轻松地组建传感器网络,为测量系统的构建引入全新概念。另外,以"一线总线"的数字方式传输,大大提高了系统的抗干扰性。适合于恶劣环境的现场温度测量,如:环境控制、设备或过程控制、测温类消费电子产品等。
2、特性
(1) 具有独特的单总线接口,与主机主需要一个线即可实现双向通信;
(2) 测温范围为-55+125℃,在-10+85℃时,精度为±0.5℃;
(3) 可编程的分辨率为 9~12 位,对应的可分辨温度分别为 0.5℃、0.25℃、0.125℃和 0.0625℃;
(4) 在9 位分辨率时,最多在93.75ms 内把温度值转换为数字,在12 位分辨率时,最多在 750ms 内把温度值转换为数字;
(5) 负压特性,电源极性接反时,温度计不会因发热而烧毁,但不能正常工作。
(6) 工作电压范围宽,电压范围为3.0~5.5V,还可用数据线供电;
(7) 支持多点组网,多个DS18B20可以并联实现多点组网测温。值得注意的是,如果数量过多,需要解决供电问题,否则电压过低会导致信号传输不稳定;
(8) 测量结果采用数字信号输出,同时具有CRC校验,具较强的抗干扰和纠错能力。
3、外形结构
DS18B20 内部结构主要由四部分组成:64 位光刻 ROM、温度传感器、非挥发的温度报警触发器 TH 和 TL、配置寄存器。DS18B20 的管脚排列如下图所示。
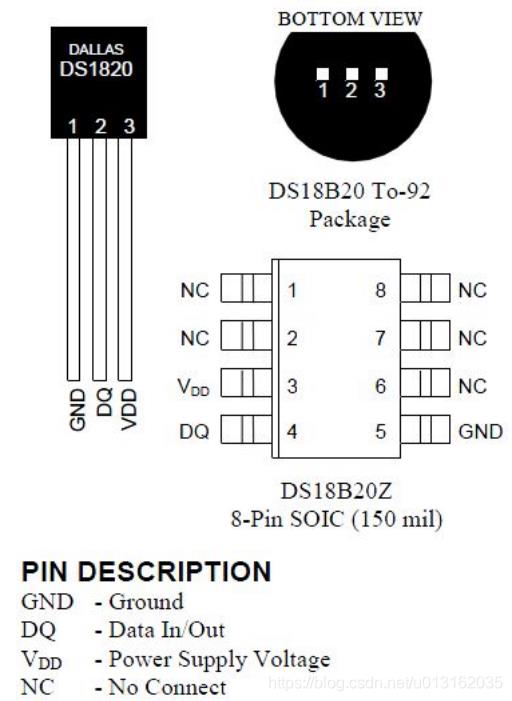
其中与操作有关的有:64位光刻ROM、9个字节的RAM存储器、温度传感器、EERPOM(温度报警寄存器TH和TL、配置寄存器)
二、HAL库完整代码
/* Includes*********************************************************************/
#include "stm32f103_DS18B20.h"
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
/* Private macro -------------------------------------------------------------*/
/* Private variables ---------------------------------------------------------*/
/* Private function prototypes -----------------------------------------------*/
/* Private functions ---------------------------------------------------------*/
static void DS18B20_Mode_IPU(void);
static void DS18B20_Mode_Out_PP(void);
static void DS18B20_Rst(void);
static uint8_t DS18B20_Presence(void);
static uint8_t DS18B20_ReadBit(void);
static uint8_t DS18B20_ReadByte(void);
static void DS18B20_WriteByte(uint8_t dat);
static void DS18B20_SkipRom(void);
static void DS18B20_MatchRom(void);
#define CPU_FREQUENCY_MHZ 72 // STM32时钟主频
void delay_us(__IO uint32_t delay)
int last, curr, val;
int temp;
while (delay != 0)
temp = delay > 900 ? 900 : delay;
last = SysTick->VAL;
curr = last - CPU_FREQUENCY_MHZ * temp;
if (curr >= 0)
do
val = SysTick->VAL;
while ((val < last) && (val >= curr));
else
curr += CPU_FREQUENCY_MHZ * 1000;
do
val = SysTick->VAL;
while ((val <= last) || (val > curr));
delay -= temp;
static void delay_us_bak(uint16_t time)
uint8_t i;
while(time)
for (i = 0; i < 10; i++)
time--;
/**
* @brief DS18B20 初始化函数
* @param None
* @retval None
*/
uint8_t DS18B20_Init(void)
DS18B20_Dout_GPIO_CLK_ENABLE();
DS18B20_Mode_Out_PP();
DS18B20_Dout_HIGH();
DS18B20_Rst();
return DS18B20_Presence ();
/**
* @brief 使DS18B20-DATA引脚变为上拉输入模式
* @param None
* @retval None
*/
static void DS18B20_Mode_IPU(void)
GPIO_InitTypeDef GPIO_InitStruct;
/* 串口外设功能GPIO配置 */
GPIO_InitStruct.Pin = DS18B20_Dout_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(DS18B20_Dout_PORT, &GPIO_InitStruct);
/**
* @brief 使DS18B20-DATA引脚变为推挽输出模式
* @param None
* @retval None
*/
static void DS18B20_Mode_Out_PP(void)
GPIO_InitTypeDef GPIO_InitStruct;
/* 串口外设功能GPIO配置 */
GPIO_InitStruct.Pin = DS18B20_Dout_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(DS18B20_Dout_PORT, &GPIO_InitStruct);
/**
* @brief 主机给从机发送复位脉冲
* @param None
* @retval None
*/
static void DS18B20_Rst(void)
/* 主机设置为推挽输出 */
DS18B20_Mode_Out_PP();
DS18B20_Dout_LOW();
/* 主机至少产生480us的低电平复位信号 */
delay_us(750);
/* 主机在产生复位信号后,需将总线拉高 */
DS18B20_Dout_HIGH();
/*从机接收到主机的复位信号后,会在15~60us后给主机发一个存在脉冲*/
delay_us(15);
/**
* @brief 检测从机给主机返回的存在脉冲
* @param None
* @retval 0:成功,1:失败
*/
static uint8_t DS18B20_Presence(void)
uint8_t pulse_time = 0;
/* 主机设置为上拉输入 */
DS18B20_Mode_IPU();
/* 等待存在脉冲的到来,存在脉冲为一个60~240us的低电平信号
* 如果存在脉冲没有来则做超时处理,从机接收到主机的复位信号后,会在15~60us后给主机发一个存在脉冲
*/
while( DS18B20_Data_IN() && pulse_time<100 )
pulse_time++;
delay_us(1);
/* 经过100us后,存在脉冲都还没有到来*/
if( pulse_time >=100 )
return 1;
else
pulse_time = 0;
/* 存在脉冲到来,且存在的时间不能超过240us */
while( !DS18B20_Data_IN() && pulse_time<240 )
pulse_time++;
delay_us(1);
if( pulse_time >=240 )
return 1;
else
return 0;
/**
* @brief 从DS18B20读取一个bit
* @param None
* @retval 读取到的数据
*/
static uint8_t DS18B20_ReadBit(void)
uint8_t dat;
/* 读0和读1的时间至少要大于60us */
DS18B20_Mode_Out_PP();
/* 读时间的起始:必须由主机产生 >1us <15us 的低电平信号 */
DS18B20_Dout_LOW();
delay_us(10);
/* 设置成输入,释放总线,由外部上拉电阻将总线拉高 */
DS18B20_Mode_IPU();
//Delay_us(2);
if( DS18B20_Data_IN() == SET )
dat = 1;
else
dat = 0;
/* 这个延时参数请参考时序图 */
delay_us(45);
return dat;
/**
* @brief 从DS18B20读一个字节,低位先行
* @param None
* @retval 读取到的数据
*/
static uint8_t DS18B20_ReadByte(void)
uint8_t i, j, dat = 0;
for(i=0; i<8; i++)
j = DS18B20_ReadBit();
dat = (dat) | (j<<i);
return dat;
/**
* @brief 写一个字节到DS18B20,低位先行
* @param dat:待写入数据
* @retval None
*/
static void DS18B20_WriteByte(uint8_t dat)
uint8_t i, testb;
DS18B20_Mode_Out_PP();
for( i=0; i<8; i++ )
testb = dat&0x01;
dat = dat>>1;
/* 写0和写1的时间至少要大于60us */
if (testb)
DS18B20_Dout_LOW();
/* 1us < 这个延时 < 15us */
delay_us(8);
DS18B20_Dout_HIGH();
delay_us(58);
else
DS18B20_Dout_LOW();
/* 60us < Tx 0 < 120us */
delay_us(70);
DS18B20_Dout_HIGH();
/* 1us < Trec(恢复时间) < 无穷大*/
delay_us(2);
/**
* @brief 跳过匹配 DS18B20 ROM
* @param None
* @retval None
*/
static void DS18B20_SkipRom ( void )
DS18B20_Rst();
DS18B20_Presence();
DS18B20_WriteByte(0XCC); /* 跳过 ROM */
/**
* @brief 执行匹配 DS18B20 ROM
* @param None
* @retval None
*/
static void DS18B20_MatchRom ( void )
DS18B20_Rst();
DS18B20_Presence();
DS18B20_WriteByte(0X55); /* 匹配 ROM */
/*
* 存储的温度是16 位的带符号扩展的二进制补码形式
* 当工作在12位分辨率时,其中5个符号位,7个整数位,4个小数位
*
* |---------整数----------|-----小数 分辨率 1/(2^4)=0.0625----|
* 低字节 | 2^3 | 2^2 | 2^1 | 2^0 | 2^(-1) | 2^(-2) | 2^(-3) | 2^(-4) |
*
*
* |-----符号位:0->正 1->负-------|-----------整数-----------|
* 高字节 | s | s | s | s | s | 2^6 | 2^5 | 2^4 |
*
*
* 温度 = 符号位 + 整数 + 小数*0.0625
*/
/**
* @brief 在跳过匹配 ROM 情况下获取 DS18B20 温度值
* @param None
* @retval 温度值
*/
float DS18B20_GetTemp_SkipRom ( void )
uint8_t tpmsb, tplsb;
short s_tem;
float f_tem;
DS18B20_SkipRom ();
DS18B20_WriteByte(0X44); /* 开始转换 */
DS18B20_SkipRom ();
DS18B20_WriteByte(0XBE); /* 读温度值 */
tplsb = DS18B20_ReadByte();
tpmsb = DS18B20_ReadByte();
s_tem = tpmsb<<8;
s_tem = s_tem | tplsb;
if( s_tem < 0 ) /* 负温度 */
f_tem = (~s_tem+1) * 0.0625;
else
f_tem = s_tem * 0.0625;
return f_tem;
/**
* @brief 在匹配 ROM 情况下获取 DS18B20 温度值
* @param ds18b20_id:用于存放 DS18B20 序列号的数组的首地址
* @retval None
*/
void DS18B20_ReadId ( uint8_t * ds18b20_id )
uint8_t uc;
DS18B20_WriteByte(0x33); //读取序列号
for ( uc = 0; uc < 8; uc ++ )
ds18b20_id [ uc ] = DS18B20_ReadByte();
/**
* @brief 在匹配 ROM 情况下获取 DS18B20 温度值
* @param ds18b20_id:存放 DS18B20 序列号的数组的首地址
* @retval 温度值
*/
float DS18B20_GetTemp_MatchRom ( uint8_t * ds18b20_id )
uint8_t tpmsb, tplsb, i;
short s_tem;
float f_tem;
DS18B20_MatchRom (); //匹配ROM
for(i=0;i<8;i++)
DS18B20_WriteByte ( ds18b20_id [ i ] );
DS18B20_WriteByte(0X44); /* 开始转换 */
DS18B20_MatchRom (); //匹配ROM
for(i=0;i<8;i++)
DS18B20_WriteByte ( ds18b20_id [ i ] );
DS18B20_WriteByte(0XBE); /* 读温度值 */
tplsb = DS18B20_ReadByte();
tpmsb = DS18B20_ReadByte();
s_tem = tpmsb<<8;
s_tem = s_tem | tplsb;
if( s_tem < 0 ) /* 负温度 */
f_tem = (~s_tem+1) * 0.0625;
else
f_tem = s_tem * 0.0625;
return f_tem;
以上是关于STM32F4 HAL库开发 -- 温度传感器(DS18B20)的主要内容,如果未能解决你的问题,请参考以下文章