导航坐标系:地心惯性坐标系地心地固坐标系当地水平坐标系载体/机体坐标系
Posted 脑壳二
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了导航坐标系:地心惯性坐标系地心地固坐标系当地水平坐标系载体/机体坐标系相关的知识,希望对你有一定的参考价值。
导航中的几种常用坐标系
- 地心惯性坐标系(ECI)
- 地心地固坐标系(ECEF)
- 当地水平坐标系(LLF)、东北天坐标系ENU
- 地平坐标系
- 载体/机体坐标系
原创不易,路过的各位大佬请点个赞
一、 地心惯性坐标系(ECI)
在空间保持静止或匀速直线运动(无加速度)的坐标系称为惯性坐标系。所有惯性器件在测量轴方向产生的都是惯性系下的测量结果。此外,还需要在惯性系下完成卫星绕地球的位置和速度的估计。对于近地卫星,通常采用地心惯性(ECI)坐标系。
- 地球质心为坐标系原点;
- z z z轴沿着地球自转轴指向协议地极;
- x x x轴位于赤道平面内,并指向春分点;
- y y y轴符合右手笛卡儿坐标系。
ECI 坐标系的坐标轴利用上标 i i i表示为 x i x_i xi , y i y_i yi , z i z_i zi。
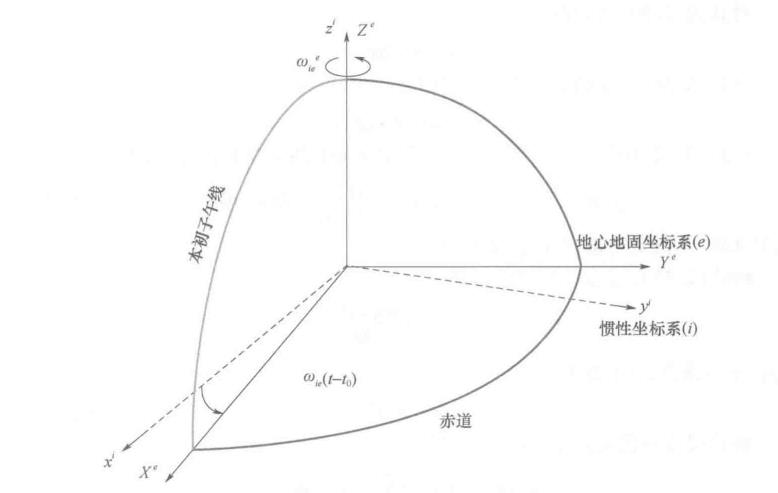
二、 地心地固坐标系(ECEF)
地心地固坐标系(ECEF)与ECI坐标系有着相同的坐标原点和
z
z
z轴定义,但是ECEF坐标系是与地球保持同步旋转的(所以命名为地固)。定义为:
一般地球导航和跟踪中,惯性坐标系即为ECEF
- 坐标原点与地球质心重合;
- z z z轴指向协议地极;
- x x x轴指向赤道与本初子午线(格林尼治子午线)的交点;
- y y y轴在赤道平面上与 x x x轴和 z z z轴构成右手笛卡儿坐标系。

ECI 坐标系的坐标轴利用上标
i
i
i表示为
x
e
x_e
xe ,
y
e
y_e
ye ,
z
e
z_e
ze。
地心地固坐标系是参与地球自转的,它相对惯性坐标系的转动角速度就等于地球自转角速度。
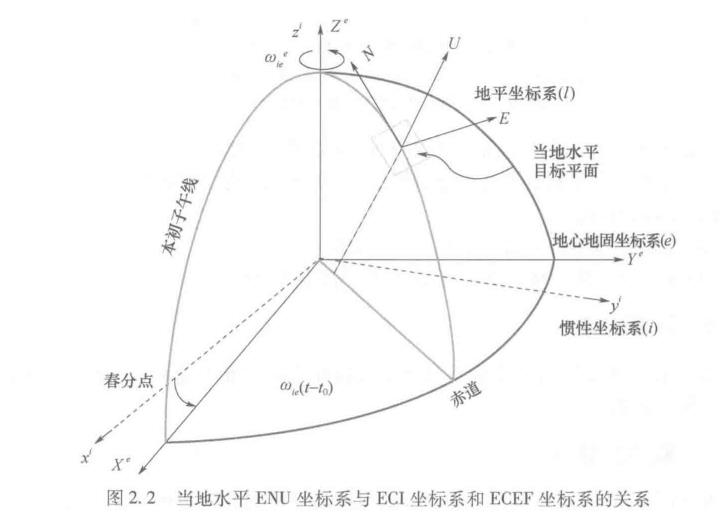
三、 当地水平坐标系(LLF)
又被称之为 地理坐标系
当地水平坐标系(LLF)用来描述运载器在近地运动中的姿态与速度。LLF坐标系也称为地理或导航坐标系。通常LLF定义如下:
- 坐标原点是惯性器件坐标系的中心(惯性器件的三轴交点);
- y y y轴水平指真北;
- z z z轴水平指东;
- z z z轴与 x x x轴、 y y y轴构成右手笛卡儿坐标系,方向与地球椭球面垂直。即指向天或地心
LLF也称为ENU坐标系,因为它的坐标轴分别指向正北、正东,和铅直向上。下图表示了该坐标系之间的关系。另一种常用LLF坐标系与ENU坐标系的z轴定义不同,它与x轴、y轴构成左手笛卡儿坐标系,z轴方向垂直于参考椭球面向下。因此,这种坐标系称为NED(北,东,地)坐标系。本书将采用ENU坐标系。
LLF坐标系的坐标轴利用上标
g
g
g表示为
x
g
x_g
xg ,
y
g
y_g
yg ,
z
g
z_g
zg。
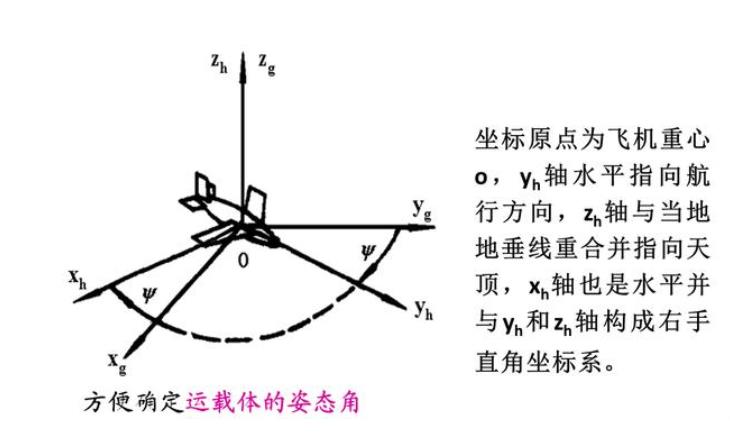
四、 地平坐标系
地平坐标系如图所示,
- 坐标原点取在运载体重心
- yh轴水平并指向航行方向
- zh轴与当地地垂线重合并指向天顶
- xh轴也是水平并与yh和zh轴构成右手直角坐标系。
- 其中Oxhyh平面就是当地水平面,Oyhzh平面就是运载体的纵向铅垂面。
在确定运载体姿态角时,采用地平坐标系更为直接和方便。
地平坐标系的坐标轴利用上标 h h h表示为 x h x_h xh , y h y_h yh , z h z_h zh。
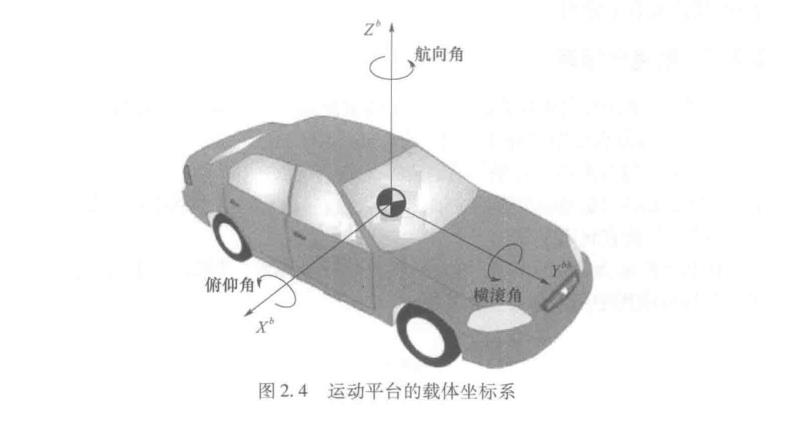
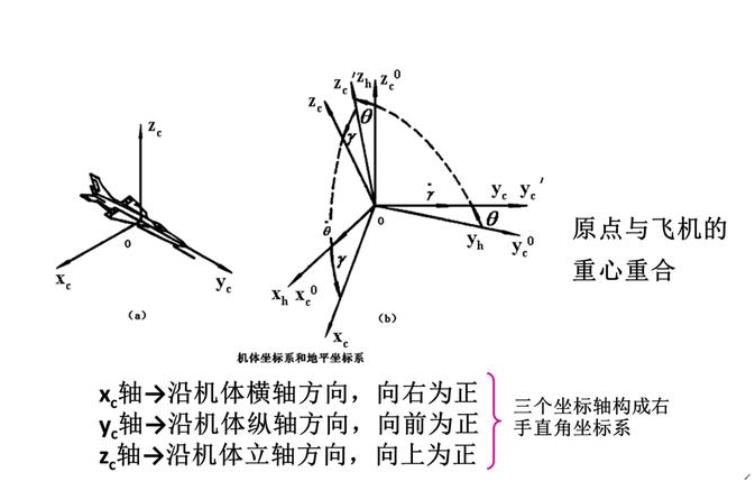
五、载体/机体坐标系
在实际应用中,加速度计的测量轴是由运动平台安装固定此器件的轴向决定的。这些坐标轴就形成了载体坐标系,定义如下:
- 坐标原点设在载体质心(这样可简化运动方程的推导);
- y轴指向载体前方,称为横滚轴,横滚角以y轴为起始旋转轴而得到,符合右手定则;
- x轴与y轴夹角90°,指向载体横向,称为俯仰轴,俯仰角以x轴为起始旋转轴而得到,符合右手定则;
- z轴与x轴、y轴构成右手笛卡儿坐标系,指向载体垂直方向,称为偏航轴,偏航角以z轴为起始旋转轴而得到,符合右手定则。
即机体坐标系与载体固连,其坐标原点与飞机重心重合。
==原创不易,路过的各位大佬请点个赞
以上是关于导航坐标系:地心惯性坐标系地心地固坐标系当地水平坐标系载体/机体坐标系的主要内容,如果未能解决你的问题,请参考以下文章