嵌入式按键中断控制 LED 跑马灯实验
Posted 啥也不想,只想搞钱
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了嵌入式按键中断控制 LED 跑马灯实验相关的知识,希望对你有一定的参考价值。
【嵌入式】按键中断控制 LED 跑马灯实验
1. 操作内容
- 熟悉中断控制主程序需要进行的步骤
- 熟悉中断服务程序需要进行的步骤
利用按键SW4和SW5实现按键中断控制LED跑马灯。按下按键SW4,LED从左向右跑马灯闪烁10次;按下按键SW5,LED从右向左跑马灯闪烁10次。编写系统的启动代码、按键中断控制程序、头文件以及Makefile文件,编译得到可执行文件,下载至开发板,实现在开发板上启动系统及按键控制功能。
2. 原理解释
2.1 实验箱按键电路
按键使用GPIO接口,但按键本身需要外部的输入。按键硬件驱动原理图如图1所示。在下图的1×6矩阵按键(SW4~SW9)电路中,使用6个输入(EINT2、EINT3、EINT4、EINT8、EINT9和EINT11)。
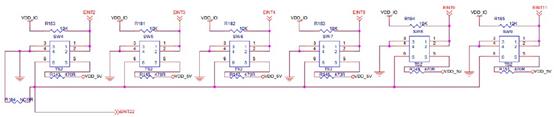
图 1 按键电路
按键入口对应的核心板接口电路如图2所示。
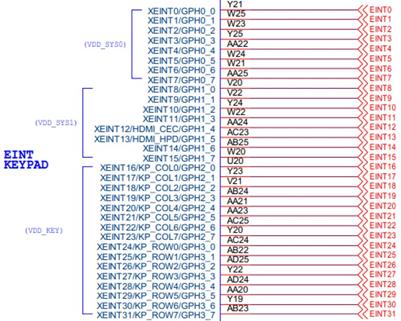
图 2 核心板按键接口电路
按键入口对应于核心板的GPH0接口,当其中一个SW按键被按下,通过查询方式就可以 检测到是哪一个接口有输入信号,从而控制相应的操作。前述的按键工作原理都是在按键 的理想状态下进行的,实际的按键动作会在短时间(几毫秒至几十毫秒)内产生信号抖动。 例如,当按键被按下时,其动作就像弹簧的若干次往复运动,将产生几个脉冲信号。一次按键操作将会产生若干次按键中断,从而会产生抖动现象。因此驱动程序中必须要解决去除抖 动所产生的毛刺信号的问题。
2.2 实验箱LED电路
LED使用GPIO接口,对应于核心板的GPJ2接口,其接口电路如图3所示。当GPJ2接口 输出低电平时,LED亮;输出高电平时,LED灭。
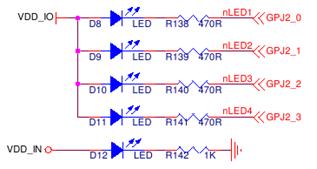
图 3 LED 接口电路
2.3 寄存器说明
按键对应的GPH0相关寄存器以及LED对应的GPJ2相关寄存器功能如下图所示。
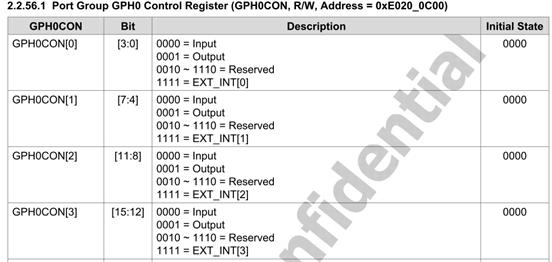
图 4 GPH0CON 寄存器功能

图 5 GPJ2CON 和 GPJ2DAT 寄存器地址
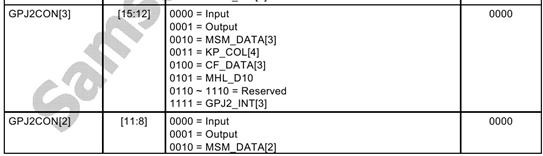
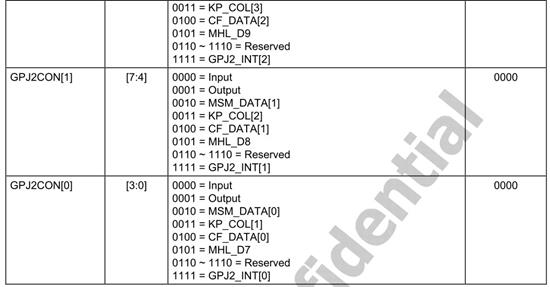
图 6 GPJ2CON 寄存器功能

图 7 GPJ2DAT 寄存器功能
3. 操作步骤
3.1 编写键控制 LED 代码,将代码编译为二进制文
a) 在 ubuntu 系统中,进入共享文件夹 forlinux,新建 key 文件夹。
b) 进入 key 文件夹,新建启动文件 start.S,并添加启动代码(参考附录 1)。
c) 新建按键控制代码文件 key.c,自行编写 c 语言代码。
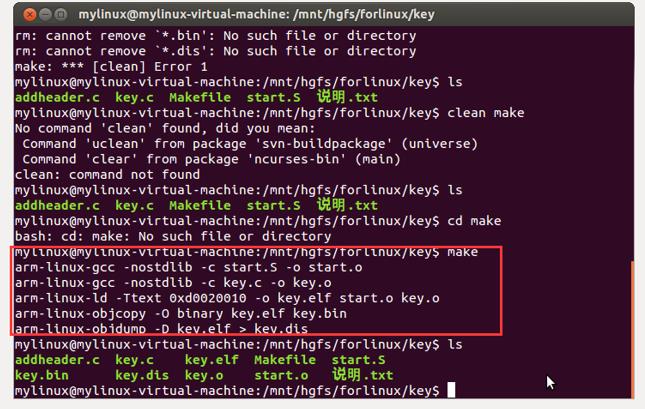
d) 新建 Makefile 文件,添加编译命令(参考附录 2),由以下命令编译生成二进制文件210.bin。
$ make clean
$ make
3.2 安装 USB 驱动
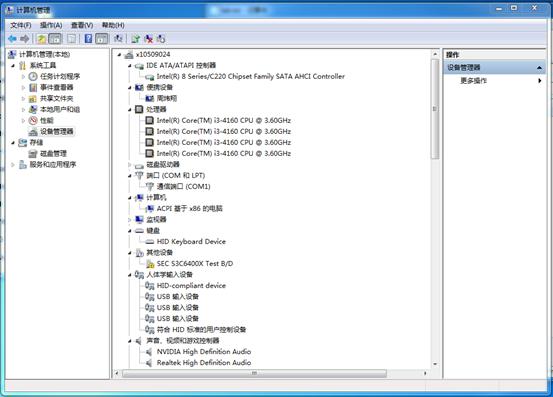
将实验箱中的拨码开关 2 拨到 on,长按 Power 键直至电脑提示安装驱动。打开计算机 设备管理器,选择下图所示硬件安装驱动。
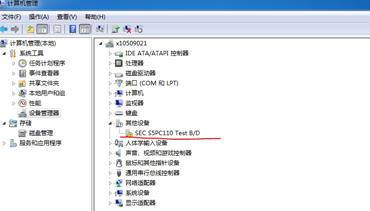
图 8 设备管理器界面
右键选择更新驱动程序,手动添加 USB 驱动程序路径“D:\\新 509\\04-常用工具\\DNW”。 在图 9 所示驱动安装过程中,关闭开发板的电源,将拨码开关 2 重新置为 OFF 状态。
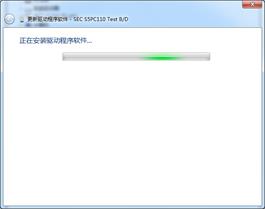
图 9 驱动程序安装
驱动安装完成提示如图 10 所示。
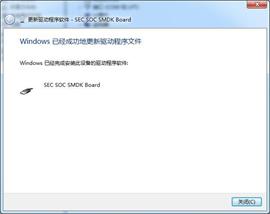
图 10 驱动安装成功
3.2 使用 DNW 软件下载裸机程序至 SRAM 中运行
1)用 USB device 线连接电脑和开发板,设置开发板为 nandflash 启动(拨码开关全部拨 至 OFF 状态)。
2)在目录“D:\\新 509\\04-常用工具\\DNW”中打开 DNW.exe。设置串口:波特率为 115200, USB Port 为 Download,Address 为 0xd0020010。
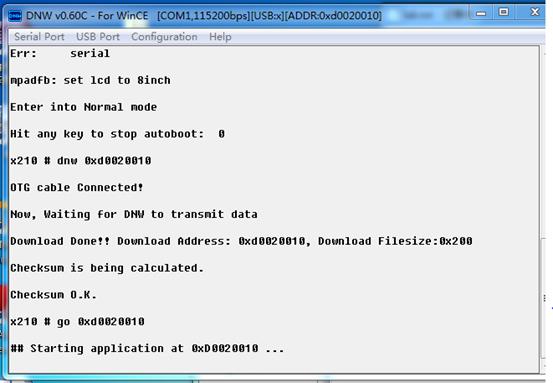
3)在菜单栏开启 DNW 串口连接(Serial Port ->Connect)。启动开发板后立即在 DNW 窗 口迅速敲击空格键进入 Uboot 状态,可见图 11 启动界面

图 11 开发板 Uboot 启动界面
4)在 DNW 窗口中输入“dnw 0xd0020010”设置下载地址。如果 DNW 驱动安装失 败或首次使用 DNW,会提示安装驱动,请正确安装驱动,等到提示硬件可使用从进行下一 步。
5)在 DNW 菜单中,选择 usbport->Transmit->Transmit 发送生成的 210.bin 文件,DNW 自动下载 210.bin 文件至开发板。 (210.bin的生成和下载,参考实验九。)
6)在 DNW 窗口中输入“go 0xd0020010”,即可开始运行 210.bin 程序。 注意,将二进制文件下载到 SRAM 中不会破坏开发板中现有文件与程序,但是掉电后所下载的文件将丢失。
4. 操作结果
附件一:start.S 文件
.global _start
.global key_isr
_start:
@设置栈,以调用c函数
ldr sp, =0x40000000
@ 开总中断
mrs r0, cpsr
@ 读取cpsr寄存器中的值到r0
bic r0, r0, #0x00000080
@ 清除第7位,IRQ中断禁止位,写0使能IRQ
msr cpsr, r0
@把修改好的r0的值重新赋会cpsr
bl main
@ 跳转到C函数去执行
halt:
b halt
key_isr:
@; 计算返回地址:PC的值等于当前执行的地址+8,当CPU正要执行某条指令时(还未执行),被中断, 这时这条刚要执行的指令的地址刚好=PC-4
sub lr, lr, #4
stmfd sp!, {r0-r12, lr}
@; 保护现场
bl key_handle
@; 恢复现场
ldmfd sp!, {r0-r12, pc}^
@; ^表示把spsr恢复到cpsr
附件二:addheader.c 文件
/*
** 在BL0阶段,iROM内固化的代码读取nandflash或SD卡前面最大16K的内容(即BL1)到iRAM,
** 并比对前16字节中的校验和是否正确,正确则继续,错误则尝试启动下一个设备。
** BL1的头信息规定如下
** 0x0:BL1的大小(最大16K,包括BL1头信息的大小)
** 0x4: 0(规定)
** 0x8:校验和
** 0xC:0(规定)
*/
#include <stdio.h>
#include <string.h>
#include <stdlib.h>
#define IMG_SIZE (16 * 1024)
#define HEADER_SIZE 16
#define BLKSIZE 512
int main(int argc, char *argv[])
{
FILE *fp;
unsigned char *Buf;
int BufLen;
int nbytes, fileLen;
unsigned int checksum, count;
int i;
if (argc != 3)
{
printf("Usage: %s <source file> <destination file>\\n", argv[0]);
return -1;
}
/* 分配16K的buffer */
BufLen = IMG_SIZE;
Buf = malloc(BufLen);
if (!Buf)
{
perror("Alloc buffer failed!");
return -1;
}
memset(Buf, 0x00, BufLen);
/* 读源bin到buffer */
fp = fopen(argv[1], "rb");
if (fp == NULL)
{
perror("source file open error");
free(Buf);
return -1;
}
/* 获取源bin长度 */
fseek(fp, 0L, SEEK_END);
fileLen = ftell(fp);
fseek(fp, 0L, SEEK_SET);
/* 源bin长度不得超过16K-16byte */
fileLen = (fileLen < (IMG_SIZE - HEADER_SIZE)) ? fileLen : (IMG_SIZE - HEADER_SIZE);
/* 读源bin到buffer[16] */
nbytes = fread(Buf + HEADER_SIZE, 1, fileLen, fp);
if (nbytes != fileLen)
{
perror("source file read error\\n");
free(Buf);
fclose(fp);
return -1;
}
fclose(fp);
/* 计算校验和 */
for (i = 0, checksum = 0; i < fileLen; i++)
checksum += Buf[HEADER_SIZE + i];
/* 计算BL1的大小:
** BL1的大小包括BL1的头信息
** 另外iROM从SD卡拷贝是按块拷贝的,因此这里需要调整大小为512字节的整数倍
*/
fileLen += HEADER_SIZE;
count = fileLen / BLKSIZE * BLKSIZE;
if (count < fileLen)
count += BLKSIZE;
memcpy(Buf, &count, 4); // 保存BL1的大小到Buf[0-3]
// 将校验和保存在buffer[8~15]
memcpy(Buf + 8, &checksum, 4);
fp = fopen(argv[2], "wb");
if (fp == NULL)
{
perror("destination file open error");
free(Buf);
return -1;
}
// 将count + HEADER_SIZE字节的buffer拷贝到目的bin中
nbytes = fwrite(Buf, 1, count, fp);
if (nbytes != count)
{
perror("destination file write error");
free(Buf);
fclose(fp);
return -1;
}
free(Buf);
fclose(fp);
return 0;
}
附件三:Makefile 文件
key.bin: start.o key.o
arm-linux-ld -Ttext 0xd0020010 -o key.elf $^
arm-linux-objcopy -O binary key.elf key.bin
arm-linux-objdump -D key.elf > key.dis
key.o: key.c
arm-linux-gcc -nostdlib -c $< -o $@
start.o:start.S
arm-linux-gcc -nostdlib -c $< -o $@
clean:
rm *.o *.elf *.bin *.dis
附件四:key.c 文件
#define GPJ2CON (*(volatile unsigned long *)0xE0200280)
#define GPJ2DAT (*(volatile unsigned long *)0xE0200284)
#define GPH0CON *((volatile unsigned long *)0xE0200C00)
#define GPH0DAT *((volatile unsigned long *)0xE0200C04)
//外中断0-7的中断控制寄存器
#define EXT_INT_0_CON *((volatile unsigned int *)0xE0200E00)
//外中断0-7的中断屏蔽寄存器
#define EXT_INT_0_MASK *((volatile unsigned int *)0xE0200F00)
//第一组矢量中断选择寄存器
#define VIC0INTSELECT *((volatile unsigned int *)0xF200000C)
//第一组矢量中断使能寄存器
#define VIC0IRQSTATUS *((volatile unsigned int *)0xF2000000)
#define VIC0INTENABLE *((volatile unsigned int *)0xF2000010)
#define VIC0VECTADDR2 *((volatile unsigned int *)0xF2000108)
#define VIC0VECTADDR3 *((volatile unsigned int *)0xF200010C)
#define VIC0ADDRESS *((volatile unsigned int *)0xF2000F00)
//外部中断0-7的中断挂起寄存器,记录是否有中断产生
#define EXT_INT_0_PEND *((volatile unsigned int *)0xE0200F40)
extern void key_isr(void);
void delay(volatile unsigned int t)
{
volatile unsigned int t2 = 0xFFFF;
while (t--)
for (; t2; t2--)
;
}
void led_init(void)
{
GPJ2CON &= ~(0xFF << 0);
GPJ2CON |= ((0x01 << 0) | (0x01 << 4) | (0x01 << 8) | (0x01 << 12));
GPJ2DAT |= (0xFF << 0);
}
void key_init(void)
{
GPH0CON |= 0xFF << 8;
/* 配置GPH0_0和GPH0_1为外部中断:key1和key2 */
EXT_INT_0_CON &= ~(0xFF << 8);
/* 清空低八位*/
EXT_INT_0_CON |= (2 << 4) | (2 << 8);
/* 配置EXT_INT[0]和EXT_INT[1]为下降沿触发 0b010 0 010 */
EXT_INT_0_MASK &= ~0xC;
/* 取消屏蔽外部中断EXT_INT[0]和EXT_INT[1] */
}
void int_init(void)
{
VIC0INTSELECT &= ~0xC;
/* 选择外部中断EXT_INT[0]和外部中断EXT_INT[1]为IRQ类型的中断 */
VIC0INTENABLE |= 0xC;
/* 使能外部中断EXT_INT[0]和EXT_INT[1] */
VIC0VECTADDR2 = (int)key_isr;
/* 当EXT_INT[0]触发中断,即用户按下key1时, CPU就会自动的将VIC0VECTADDR0的值赋给VIC0ADDRESS并跳转到这个地址去执 行*/
VIC0VECTADDR3 = (int)key_isr;
VIC0ADDRESS = 0;
}
void key_handle()
{
volatile unsigned char key_code = VIC0IRQSTATUS & 0xC;
VIC0ADDRESS = 0;
/* 清中断向量寄存器 */
EXT_INT_0_PEND |= 0x3;
/* 清中断挂起寄存器 */
if (key_code == 0x04) /* SW4 */
{
int num = 10;
while (num--)
{
GPJ2DAT ^= 1 << 0;
delay(100);
GPJ2DAT ^= 1 << 1;
delay(100);
GPJ2DAT ^= 1 << 2;
delay(100);
GPJ2DAT ^= 1 << 3;
delay(100);
}
}
/* toggle LED1 */
else if (key_code == 0x08) /* SW5 */
{
int num = 10;
while (num--)
{
GPJ2DAT ^= 1 << 3;
delay(100);
GPJ2DAT ^= 1 << 2;
delay(100);
GPJ2DAT ^= 1 << 1;
delay(100);
GPJ2DAT ^= 1 << 0;
delay(100);
}
}
/* toggle LED2 */
}
int main()
{
led_init();
key_init();
int_init();
while (1)
;
return 0;
}
以上是关于嵌入式按键中断控制 LED 跑马灯实验的主要内容,如果未能解决你的问题,请参考以下文章