技术分享 | 浅谈麦克纳姆轮的运动方式
Posted 阿木实验室
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了技术分享 | 浅谈麦克纳姆轮的运动方式相关的知识,希望对你有一定的参考价值。
自主移动机器人包括轮式和非轮式两类,能够通过自身携带的传感器感知周围环境并进行自主导航,其应用范围涵盖工业生产制造、航空航天、国防安全、智能家居等方方面面。


图1 轮式和非轮式机器人
轮式移动机器人分为差动式机器人和全向移动机器人,全向移动机器人得益于无约束的运动学模型,能够在狭窄且复杂多变的环境中自由运行,比传统的差分轮模型及阿克曼模型消耗更少的能量。为了实现全向移动,一般机器人会使用「全向轮」(Omni Wheel)或「麦克纳姆轮」(Mecanum Wheel)。麦克纳姆轮作为一种经典的万向轮的结构,在万向运动机器人平台上有着重要的地位。

(a)全向轮

(b)麦克纳姆轮
图2全向轮和麦克纳姆轮
Mecanum轮共有两部分组成,一部分是固定于轮盘中心的轮毂,另一部分是和安装在轮毂上的可以转动的辊子构成,辊子中心轴线与轮毂中心轴线呈一定的角度。Mecanum轮通过驱动电机带动在平面上进行运动时,Mecanum轮与地面的接触位置是辊子的外部形状组成外廓包络曲面。要使Mecanum轮能够保持在运动过程中平稳并且不会出现打滑或者振动的现象,那么至少应该保证以下原则:
(1)在Mecanum轮运动过程中,确保至少能有一个辊子保持与地面接触。
(2)Mecanum轮轮毂的中心轴线在运动过程中与地面始终保持恒定距离。
(3)由辊子外表形状组成的外轮廓线应为一个近似圆周曲线。
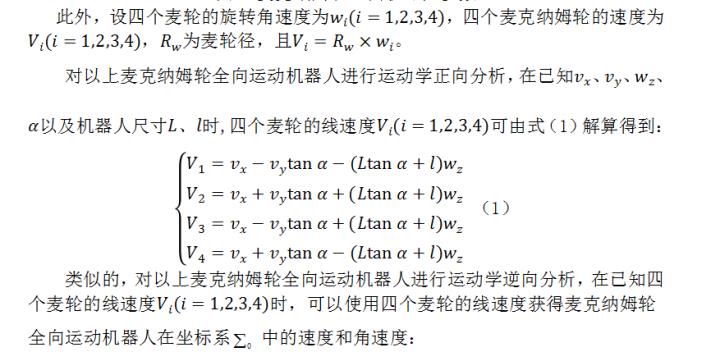
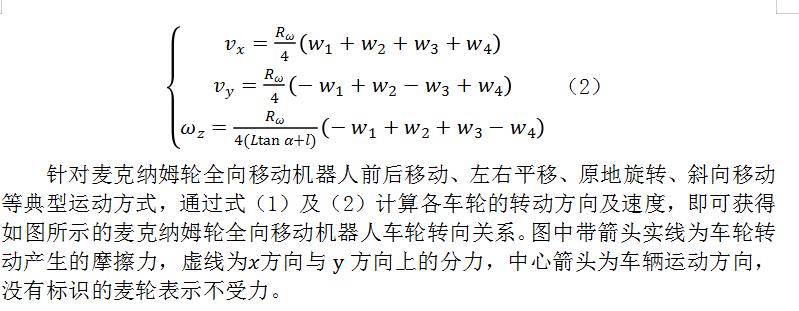
机器人运动学模型一般有正逆两种解析方式,对于四轮麦克纳姆轮底盘,正运动学模型解析为已知机器人底盘的速度及角速度,推测四个轮子的线速度。在底层控制系统中,速度、加速度输入通过正运动学解析到四个麦轮上,进行PID运动控制。底盘的逆运动学模型解析是指已知每个轮子的线速度,推测底盘的速度、角速度,基于编码器的里程计即由四个轮子的编码器通过逆运动学模型解析得到。


图4 麦克纳姆轮全方位移动机器人运动学分析示意图
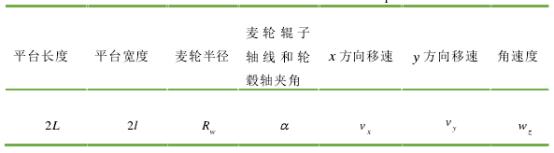
图5 麦克纳姆轮全向机器人参数
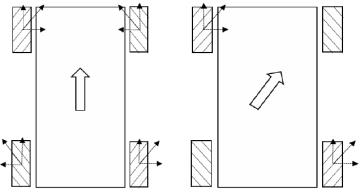
(a)纵向移动 (b)斜向移动
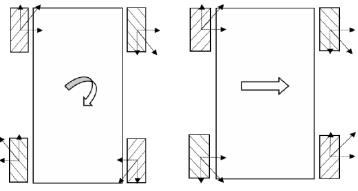
(c)原地旋转 (d) 横向移动
图5 常见机器人全向移动与车轮的转动关系
由图5可知,根据麦克纳姆轮全向移动机器人运动学公式对每个麦轮进行驱动,机器人可在平面内的任意方向移动和转动。
文章最后,我们看下麦克纳姆轮在AGV中的应用。
视频连接:
https://haokan.baidu.com/v?vid=2246135911226513836&pd=bjh&fr=bjhauthor&type=video
作者:阿木实验室-木十
- End -
技术发展的日新月异,阿木实验室将紧跟技术的脚步,不断把无人机行业最新的技术和硬件推荐给大家。看到经过我们培训的学员在技术上突飞猛进,是我们培训最大的价值。如果你在无人机行业,就请关注我们的公众号,我们将持续发布无人机行业最有价值的信息和技术。
以上是关于技术分享 | 浅谈麦克纳姆轮的运动方式的主要内容,如果未能解决你的问题,请参考以下文章
nrf24L01的通讯控制 基于L298N驱动的麦克纳姆轮的小车
nrf24L01的通讯控制 基于L298N驱动的麦克纳姆轮的小车
nrf24L01的通讯控制 基于L298N驱动的麦克纳姆轮的小车