nrf24L01的通讯控制 基于L298N驱动的麦克纳姆轮的小车
Posted 王若依
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了nrf24L01的通讯控制 基于L298N驱动的麦克纳姆轮的小车相关的知识,希望对你有一定的参考价值。
NRF24L01的通讯调配
前言
其实前两篇博客已经将完整的麦克纳姆的小车组装和代码部分已经做好。不过小车带线控制确实很难受。于是用射频来控制,直接用电脑来操控,将上位机的代码转到射频终端来写。不过是有线转无线,看起来虽然简单,但是通讯的调试确实并不想象中的那么简单。类似于之前的红外遥控模块,无非是检测出来按键对应的编码,然后串口判断接受的编码,最终实现了控制的功能。但是,红外遥控的连续性不高,在灵活遥控小车方面明显显得十分吃力。而射频nrf14l01是一个不错的选择,但是在网上的相关资料确实不多,用起来方便,但是调配确实是一个难题。终于,试了N多个串口助手,最后找了一个上位机软件给调试成功了。
材料准备
1.两块需要配置的nrf240l01
2.USB转TTL模块(在使用串口助手的时候,注意TX和RX是交叉相连的)

调试
用一个上位机位机软件将两块通讯模块的地址相互调配,作为专属的接收器和服务器。同时要求两个模块处于相同的频率,通过串口来实现模块之间的相互的传输。
链接:https://pan.baidu.com/s/1AGb8Ewv2Qsm8fIHm7SRI8g
提取码:mwq5

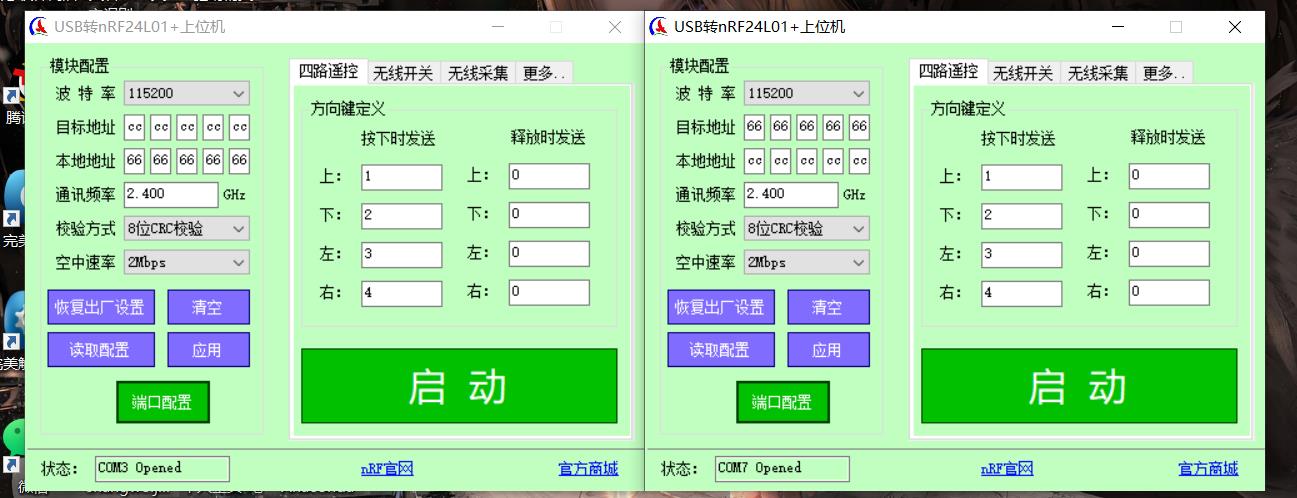
打开之后,点开界面,点击打开串口,将波特率调到统一的115200。然后点击模块配置,将其中得一个端口(博主的两个端口分别是CMO3和COM7)目标地址设置为与另一个端口的本地地址相对应。启动,开始将两个串口调到统一的频率。
链接:https://pan.baidu.com/s/1_eU42gcxSP6LM4Na_12S4A
提取码:yzcv
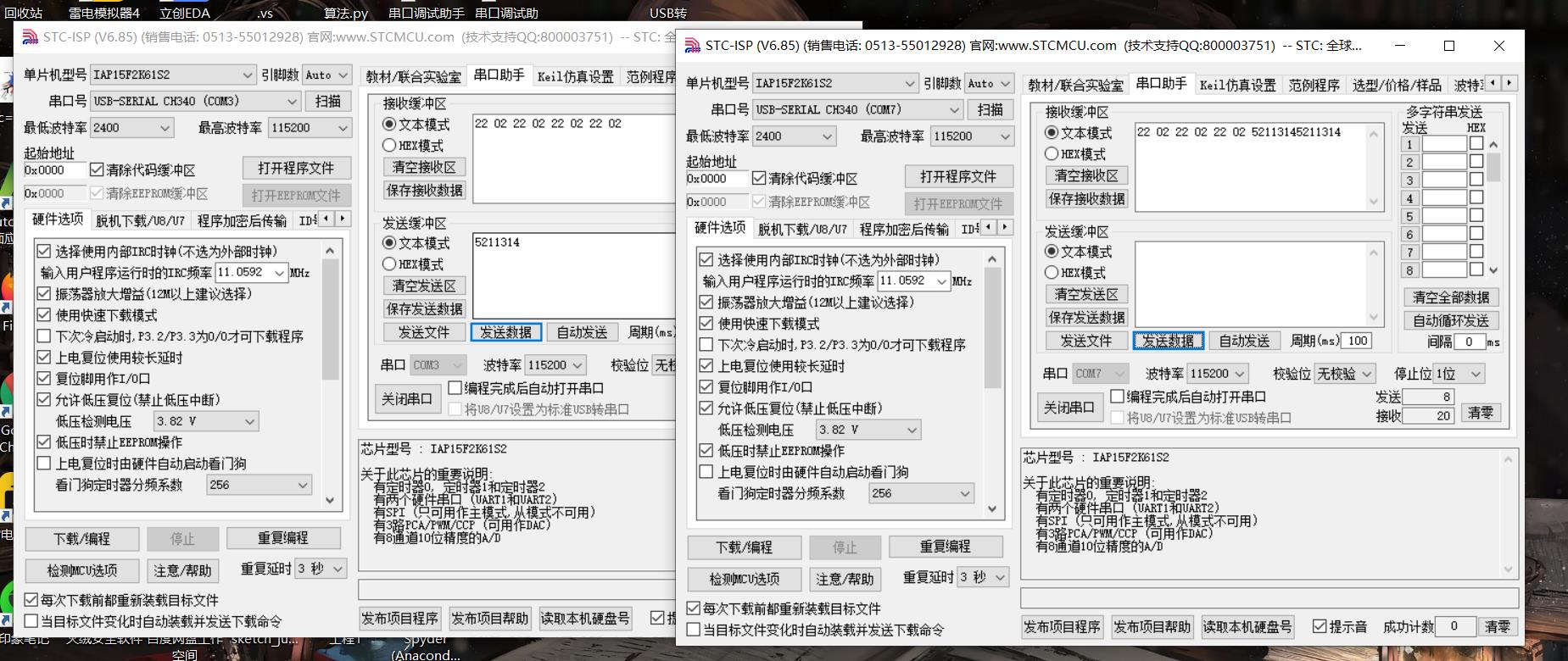 最后可以开两个STC串口助手,可以进行两个的串口的相互接受和发送文件。
最后可以开两个STC串口助手,可以进行两个的串口的相互接受和发送文件。
这说明串口已经调通,现在可以通过自定义协议来实现通过无线射频来操控和小车了。
以上是关于nrf24L01的通讯控制 基于L298N驱动的麦克纳姆轮的小车的主要内容,如果未能解决你的问题,请参考以下文章