四旋翼自主飞行器探测跟踪系统(C 题 本科组)--2017 年全国大学生电子设计竞赛试题
Posted 行走的皮卡丘
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了四旋翼自主飞行器探测跟踪系统(C 题 本科组)--2017 年全国大学生电子设计竞赛试题相关的知识,希望对你有一定的参考价值。
四旋翼自主飞行器探测跟踪系统(C 题 本科组)–2017 年全国大学生电子设计竞赛试题
一、任务
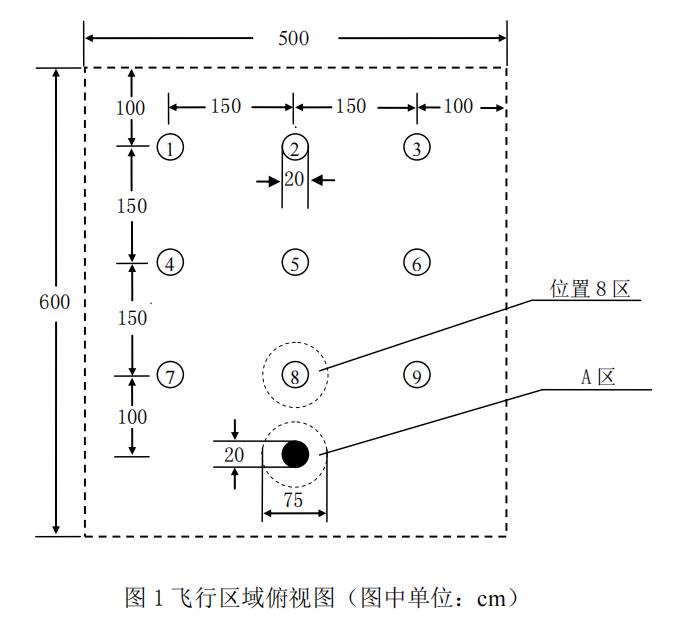
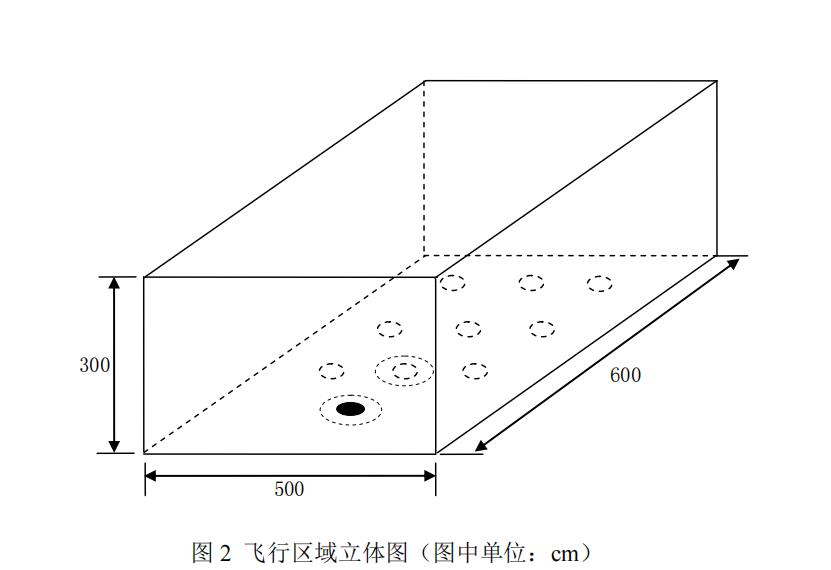
设计并制作四旋翼自主飞行器探测跟踪系统,包括设计制作一架四旋翼自主飞行器,飞行器上安装一向下的激光笔;制作一辆可遥控小车作为信标。飞行器
飞行和小车运行区域俯视图和立体图分别如图 1 和图 2 所示。
二、要求
2.1、基本要求
(1)四旋翼自主飞行器(以下简称飞行器)摆放在图 1 所示的 A 区,一键式启动飞行器,起飞并在不低于 1m 高度悬停, 5s 后在 A 区降落并停机。悬停期间激光笔应照射到 A 区内。
(2)手持飞行器靠近小车,当两者距离在 0.5~1.5m 范围内时,飞行器和小车发出明显声光指示。
(3)小车摆放在位置 8。飞行器摆放在 A 区,一键式启动飞行器,飞至小 车上方且悬停 5s 后择地降落并停机;悬停期间激光笔应照射到位置 8区内且至少照射到小车一次,飞行时间不大于 30s。
2.2、 发挥部分
(1)小车摆放在位置 8。飞行器摆放在 A 区,一键式启动飞行器,飞至小车上方后,用遥控器使小车到达位置 2 后停车,期间飞行器跟随小车飞行;小车静止 5s 后飞行器择地降落并停机。飞行时间不大于 30s。
(2)小车摆放在位置 8。飞行器摆放在 A 区,一键式启动飞行器。用遥控器使小车依次途经位置 1~9 中的 4 个指定位置,飞行器在距小车0.5~1.5m 范围内全程跟随;小车静止 5s 后飞行器择地降落并停机。飞行时间不大于 90s。
(3)其他
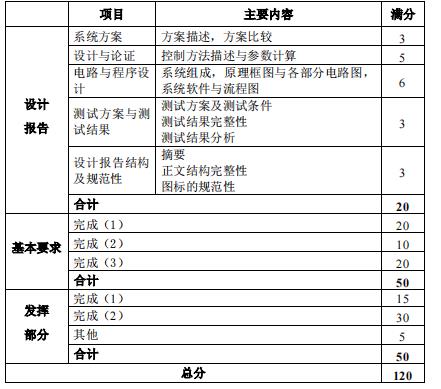
三、评分标准
四、说明
-
1.参赛队所用飞行器应遵守中国民用航空局的管理规定(《民用无人驾驶航空器实名制登记管理规定》,编号:AP-45-AA-2017-03)。
-
2.飞行器桨叶旋转速度高,有危险!请务必注意自己及他人的人身安全。
-
3.除小车、飞行器的飞行控制板、单一摄像功能模块外,其他功能的实现必须使用组委会统一下发的 2017全国大学生电子设计竞赛RX23T开发套件中RX23T MCU板(芯片型号 R5F523T5ADFM,板上有NUEDC标识)。RX23T MCU 板应安装于明显位置,可插拔,“NUEDC”标识易观察,以便检查。
-
4.四旋翼飞行器可自制或外购,带防撞圈,外形尺寸(含防撞圈)限定为:长度≤50cm,宽度≤50cm。飞行器机身必须标注赛区代码。
-
5.遥控小车可自制或外购,外形尺寸限定为:长度≤20cm,宽度≤15cm。小车车身必须标注赛区代码。
-
6.飞行区域地面为白色;A 区由直径 20cm 黑色实心圆和直径 75cm 的同心圆组成。位置 1~9 由直径 20cm 的圆形及数字 1~9 组成。位置 8 区是C –4/ 4 指位置 8 的直径 75cm 同心圆。圆及数字线宽小于 0.1cm。飞行区域不得额外设置任何标识、引导线或其他装置。
-
7.飞行过程中飞行器不得接触小车。
-
8.测试全程只允许更换电池一次。
-
9.飞行器不得遥控,飞行过程中不得人为干预。小车由一名参赛队员使用一个遥控器控制。小车与飞行器不得有任何有线连接。小车遥控器可用成品。
-
10.飞行器飞行期间,触及地面或保护网后自行恢复飞行的,酌情扣分;触地触网后 5s 内不能自行恢复飞行视为失败,失败前完成的部分仍计分。
-
11.一键式启动是指飞行器摆放在 A 区后,只允许按一个键启动。如有飞行模式设置应在飞行器摆放在 A 区前完成。
-
12.基本要求(3)和发挥部分(1)、(2)中择地降落是指飞行器稳定降落于场地任意地点,避免与小车碰撞。
-
13.基本要求(3)和发挥部分(1)、(2)飞行时间超时扣分。
-
14.发挥部分(1)、(2)中飞行器跟随小车是指飞行器飞行路径应与小车运行路径一致,出现偏离酌情扣分。飞行器飞行路径以激光笔照射地面位置为准,照射到小车车身或小车运行路径视为跟随。
-
15.发挥部分(2)中指定位置由参赛队员在测试现场抽签决定。
-
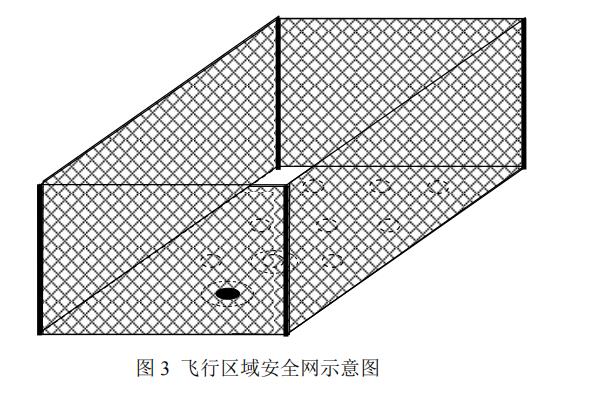
16.为保证安全,可沿飞行区域四周架设安全网(长 600cm,宽 500cm,高300cm),顶部无需架设。若安全网采用排球网、羽毛球网时可由顶向下悬挂不必触地,不得影响视线。安装示意图如图 3 所示。
以上是关于四旋翼自主飞行器探测跟踪系统(C 题 本科组)--2017 年全国大学生电子设计竞赛试题的主要内容,如果未能解决你的问题,请参考以下文章
多旋翼自主飞行器(C 题 本科组)-- 2015 年全国大学生电子设计竞赛试题
飞行器基于matlab四旋翼无人机几何跟踪控制含Matlab源码 2270期