工业视觉引导基础及项目评估流程
Posted 苏州程序大白
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了工业视觉引导基础及项目评估流程相关的知识,希望对你有一定的参考价值。
工业视觉引导基础及项目评估流程
1、引导类型
• 抓取通过图像模板位置,机械手/模组的模板位置,当前产品位置计算。
• 放置固定点通过定点拍照产品位置,机械手/模组的位置,目标放置位计算。
• 产品对位一个产品固定,另一产品由机械手/模组带着移动,相机分别得到两组产品的位置,计算对位的坐标。
• 点轨迹相机拍照(固定/移动)获得产品的基准,通过实际轨迹与基准坐标之间的关系映射出实际产品的点位置。
2、相机架设方式
• 固定相机固定/移动到某一固定点位拍照。
• 移动执行机构(负责完成引导定位动作)的机械手/模组,非执行机构的模组。
3、配合运动机构
• 四轴机械手。
• 六轴机械手。
• XYR模组。
• XXY/XYY平台
先算角度再移动X。
• 蜘蛛手机器人。
• 龙门式XY平台。
4、相机拍照方式
• 静态。
• 飞拍产品运动中拍照后,到达某一固定位置实现定位抓取/对位考虑相机的拖影以及相机的触发方式。
5、标定方式
• 二维码棋盘格坐标系关联。
• 九点标定+旋转中心计算(两点/多点拟合圆)/旋转中心计算+九点标定。
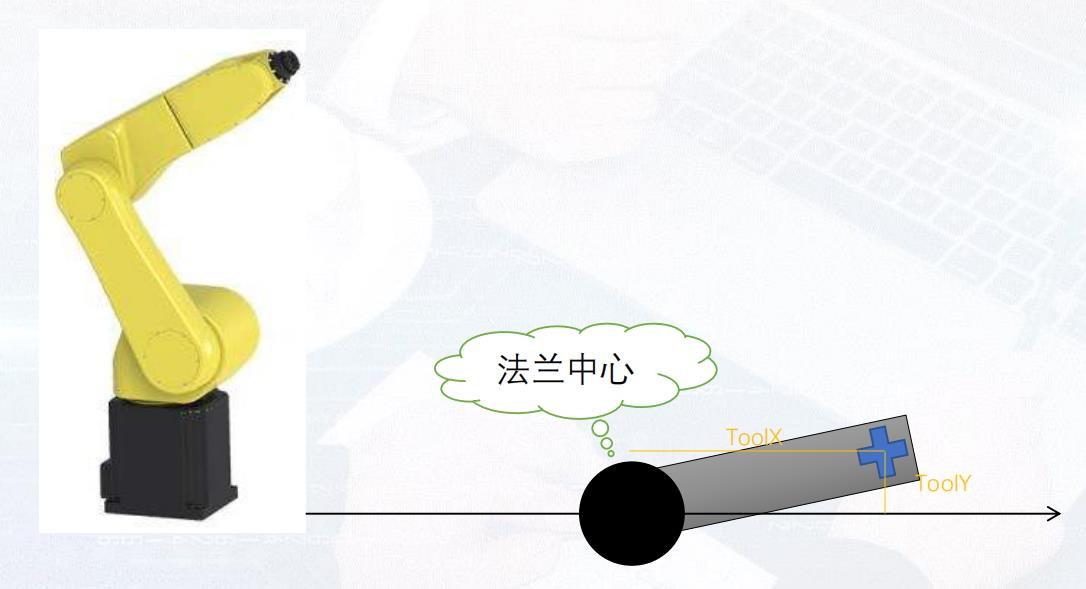
6、旋转中心(这个之前的文章讲过,你们可以看这个文章)
• 有角度计算
• 无角度计算
6、旋转中心(不明白的可以看这个文章)
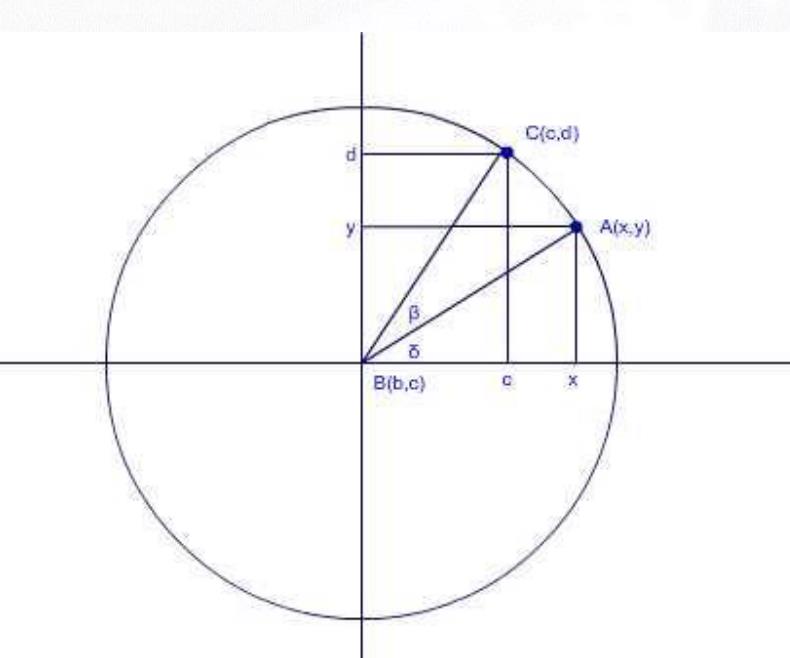
c=rcos(δ+β)=rcos(δ)cos(β)-r*sin(δ)sin(β)=xcos(β)-ysin(β)
d=rsin(δ+β)=rsin(δ)cos(β)+r*cos(δ)sin(β)=ycos(β)+xsin(β)
7.0引导项目评估-硬件选择
• 确定产品信息(产品大小,产品种类,产品公差)。
• 拍照特征(视野大小)。
• 选择相机(相机个数、拍照方式)、镜头(工作距离)、光源。
7.1、引导项目评估-精度分析
• 相机精度
• 运动机构精度(模组/机械手)
• 平台精度(机构安装)
• 产品公差
• 标定精度
7.2、引导项目评估-标定方式
• 配合的运动机构类型
• 相机的安装方式(固定、移动)
• 多相机标定(单独标定/联合标定)
• 标定治具(机构需要设计什么样的治具方便标定)
7.3、引导项目评估-计算方法
• 抓取图像模板、机械手模板、实时产品坐标
• 对位两个产品的坐标• 放置实时产品坐标、机械手模板放置位置
• 轨迹需求点与拍照计算点的相对坐标关系
我做过的项目都按照这种流程运行,如果你们有更好的流程。可以分享下。相互学习下。谢谢大家!!!
关注苏州程序大白,持续更新技术分享。谢谢大家支持
以上是关于工业视觉引导基础及项目评估流程的主要内容,如果未能解决你的问题,请参考以下文章