ROS学习笔记-rosbag数据记录包的使用-机器人自动建图
Posted 殇堼
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS学习笔记-rosbag数据记录包的使用-机器人自动建图相关的知识,希望对你有一定的参考价值。
1.建图并记录
以基于gmapping算法所建地图为例
三个终端分别启动以下文件:
roslaunch mbot_gazebo mbot_laser_nav_gazebo.launch
roslaunch mbot_navigation gmapping_demo.launch
roslaunch mbot_teleop mbot_teleop.launch
新终端:
cd bagfiles
rosbag record -a
键盘控制机器人建图,完成后,终止rosbag record -a所在终端。
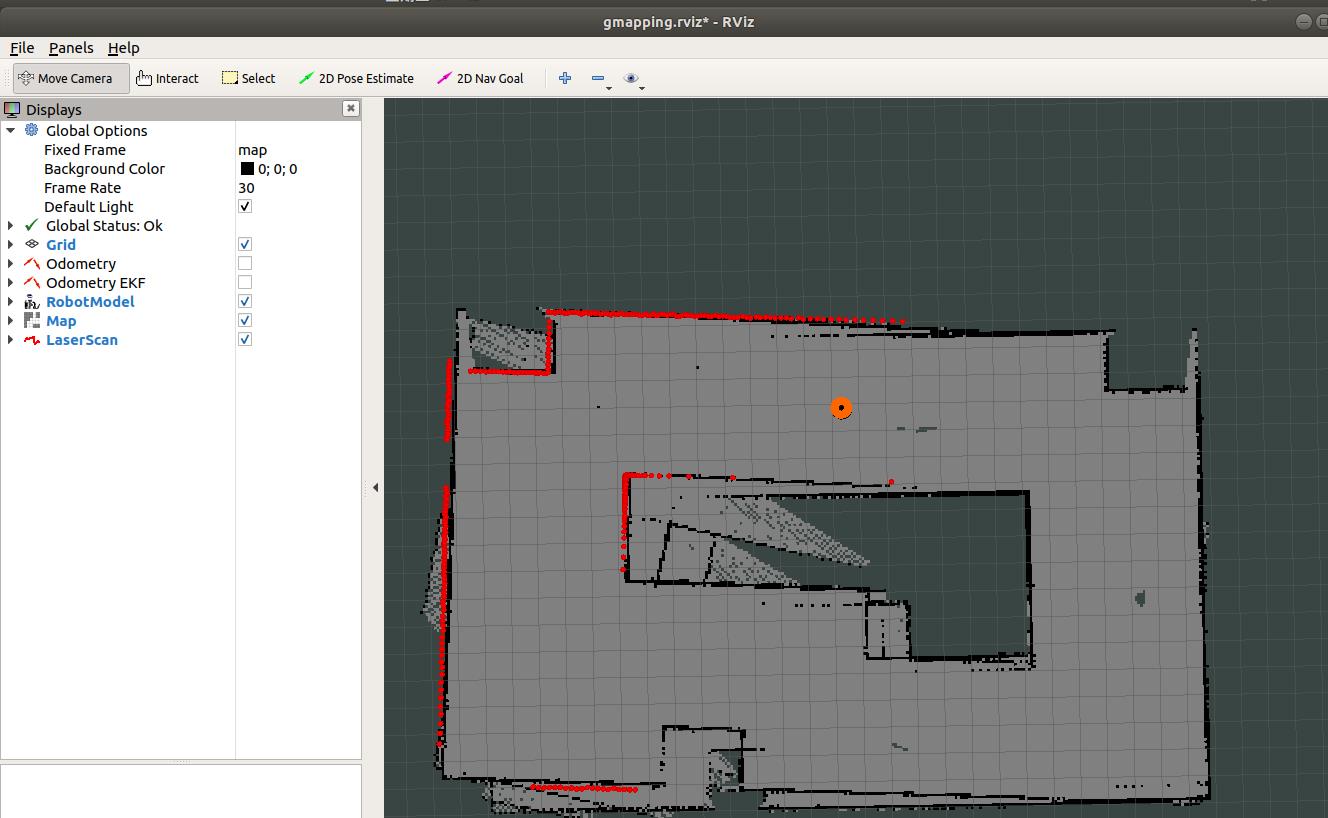
所建地图如下
2.回放建图
关闭以下三个终端后重新启动前两个终端:
roslaunch mbot_gazebo mbot_laser_nav_gazebo.launch
roslaunch mbot_navigation gmapping_demo.launch
roslaunch mbot_teleop mbot_teleop.launch
新终端:
cd bagfiles
rosbag play 文件名
事实证明,自动建图遵循轨迹数据,而栅格地图是重新生成的。
如果在回放过程中启动键盘控制节点,并控制机器人运动,实践证明将会干扰机器人回放所制定的轨迹。
以下是自动回放所建地图,跟实际地图不一致。
以上是关于ROS学习笔记-rosbag数据记录包的使用-机器人自动建图的主要内容,如果未能解决你的问题,请参考以下文章
ROS学习笔记-rosbag数据记录包的使用-记录和回放小海龟历程