simulink官方电机控制示例汇总
Posted 小麦大叔
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了simulink官方电机控制示例汇总相关的知识,希望对你有一定的参考价值。
当前matlab版本为2020a
打开方式:
- 打开
matlab - 主界面打开
help - 在
Category分类下打开Simscape Electrical - 在
Applications下打开Electric Drives
最后可以看到如下图所示界面:

文章目录
- 1 异步电机直接转矩控制
- 2 异步电机空间矢量调制直接转矩控制
- 3 异步电机标量控制
- 4 无刷直流电机电流迟滞控制
- 5 直流无刷电机位置控制
- 6 直流无刷电机速度控制
- 7 混合励磁同步电机转矩控制
- 8 混合励磁同步电机速度控制
- 9 内置式永磁同步电机转矩控制
- 10 内置式永磁同步电机基于转矩的负载控制
- 11 内置式永磁同步电机速度控制
- 12 永磁同步电机弱磁控制
- 13 永磁同步电机位置控制
- 14 同步电机转矩控制
- 15 同步电机速度控制
- 16 开关磁阻电机电流控制
- 17 开关磁阻电机速度控制
- 18 同步电机状态空间控制
- 19 同步磁阻电机转矩控制
- 20 同步磁阻电机速度控制
- 21 有感三相异步电机驱动
- 22 无感三相异步电机驱动
- 23 三相永磁同步电机驱动
- 24 三相永磁同步牵引驱动
- 25 三相同步电机控制
- 26 三相同步电机驱动
- 结论
1 异步电机直接转矩控制
Asynchronous Machine Direct Torque Control
这个例子展示了如何控制异步机(ASM)使用直接转矩控制方法。 基于pi的速度控制器提供扭矩参考。 直接转矩控制器产生逆变器脉冲。
2 异步电机空间矢量调制直接转矩控制
Asynchronous Machine Direct Torque Control with Space Vector Modulator
这个例子展示了如何控制异步电机(ASM)使用直接转矩控制方法与空间矢量调制器。 基于pi的速度控制器提供扭矩参考。 直接转矩控制器产生空间矢量调制器所需的参考电压。 直流电压源通过控制的平均值电压源转换器提供给ASM。
3 异步电机标量控制
Asynchronous Machine Scalar Control
这个例子展示了如何在异步机(ASM)驱动器使用标量V/f控制方法来控制转子转速。
转换器将参考速度转换为参考电气频率。 控制器通过标量V/f控制保持恒定的电压频率比,从参考频率产生参考电压。
4 无刷直流电机电流迟滞控制
BLDC Hysteresis Current Control
这个例子展示在一个基于电驱动器使用滞后控制器的无刷直流电机中如何控制电流。
直流电压源通过一个控制的三相逆变器供给无刷直流电源。 向电机控制器提供电流要求的斜坡。 负载转矩是二次依赖于转子转速。 控制子系统实现了基于迟滞的电流控制策略。
scope子系统包含允许您查看模拟结果的范围。
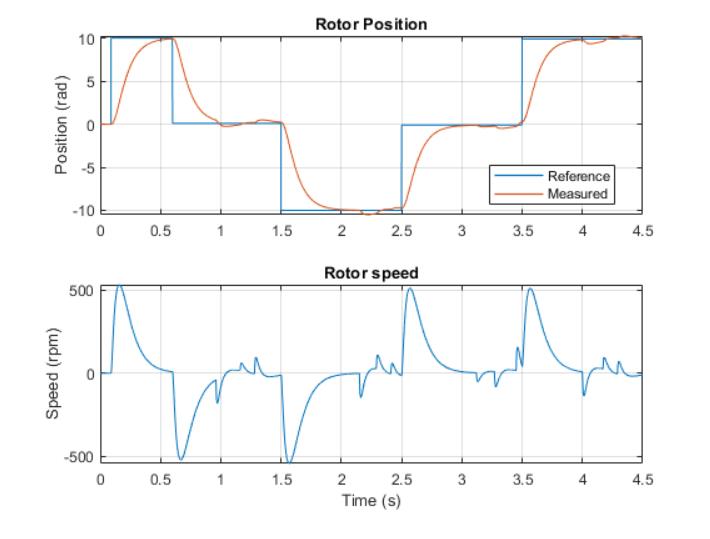
5 直流无刷电机位置控制
这个例子展示了如何控制无刷直流电机驱动的转子角度。
理想的扭矩源提供负载。
控制子系统采用基于PI的串级控制结构,包括三个控制环:
- 一个外部位置控制环;
- 一个速度控制环;
- 一个内部电流控制环;
无刷直流电机由三相逆变器供电。
逆变器的门信号是从霍尔信号中获得的。 模拟使用步骤引用。 scope子系统包含允许您查看模拟结果的范围。
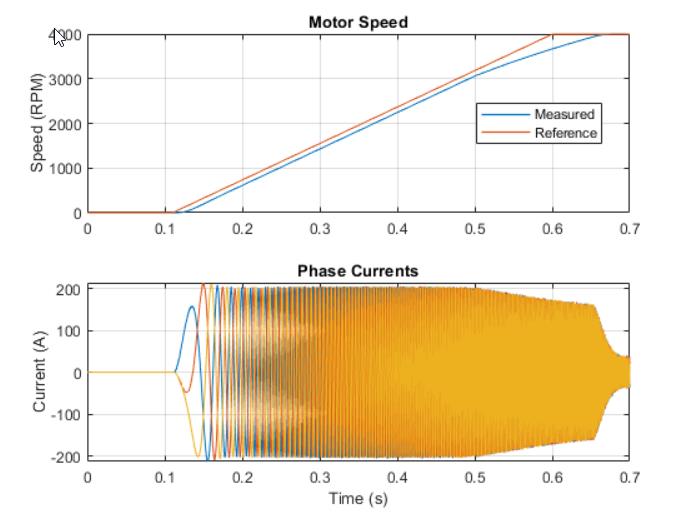
6 直流无刷电机速度控制
BLDC Speed Control
这个例子展示了如何在无刷直流电机驱动控制转子转速。
理想的扭矩源提供负载。
控制子系统采用基于PI的串级控制结构;
- 外部有速度控制环;
- 内部有直流链路电压控制环
直流环节电压通过DC-DC buck变换器(直流转直流降压变换器)进行调整。
无刷直流电机由三相逆变器供电。 逆变器的门信号是从霍尔信号中获得的。 模拟使用速度步长。 scope子系统包含允许您查看模拟结果的范围。
7 混合励磁同步电机转矩控制
HESM Torque Control
HESM即为
hybrid excitation synchronous machine
这个例子展示了基于电牵引驱动如何控制转矩混合励磁同步电机(HESM)。
永磁体和一个激励绕组激励HESM。
高压电池供给SM通过一个控制三相变换器定子绕组和通过一个控制四象限斩波器转子绕组。
理想的角速度源提供了负载。
控制子系统使用开环方法来控制转矩和闭环方法来控制电流。
在每一个采样瞬间,扭矩请求被转换为相关的电流参考。 当前的控制是基于pi的。 仿真在电机和发电机模式下使用了几个转矩步骤。 Visualization子系统包含允许您查看模拟结果的范围。
8 混合励磁同步电机速度控制
HESM Velocity Control
这个例子展示了如何控制转子角速度在混合激励同步电机(HESM)的电牵引驱动。
永磁体和一个激励绕组激励HESM。
高压电池通过一个用于定子绕组的受控三相变换器和一个用于转子绕组的受控四象限斩波器供给HESM。
理想的扭矩源提供负载。 控制子系统包括基于多速率pi的串级控制结构。
该控制结构有一个外部角速度控制环和三个内部电流控制环。 Visualization子系统包含允许您查看模拟结果的范围。
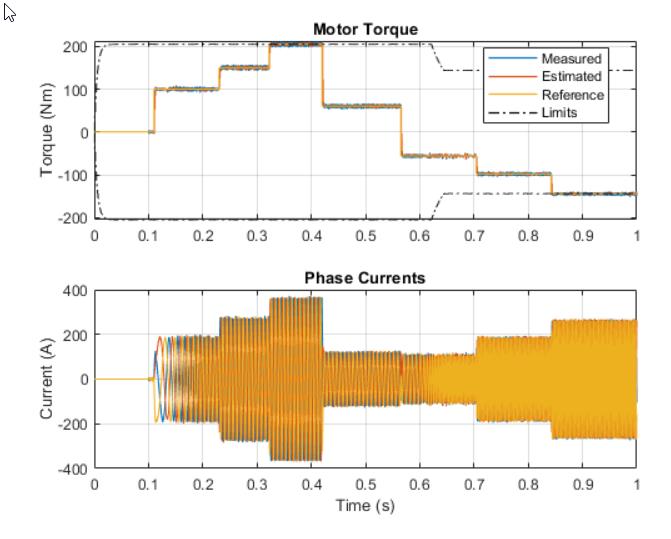
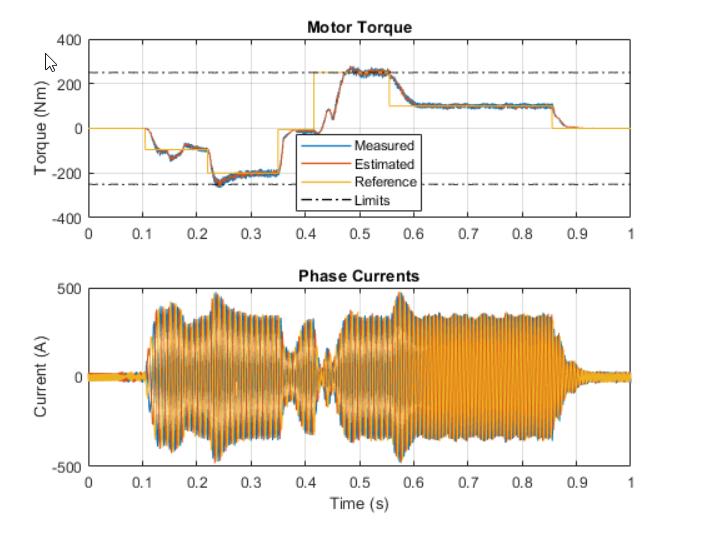
9 内置式永磁同步电机转矩控制
IPMSM Torque Control
IPMSM即为内置式永磁同步电机
这个例子展示了如何控制扭矩在一个内置式永磁同步电机(IPMSM)的基础上汽车电牵引驱动。
高压电池通过一个控制的三相变换器供给IPMSM。
根据负载的不同,IPMSM可以以电动机和发电两种方式运行。 理想的角速度源提供了负载。
控制子系统采用开环方法控制IPMSM的转矩,采用闭环方法控制电流。
在每一个采样瞬间,扭矩请求被转换为相关的电流参考。
当前控制是基于pi的,并使用比用于扭矩控制的速率更快的采样速率。
仿真在电机和发电机模式下使用了几个转矩步骤。 任务调度是在statflow®中设计的。 scope子系统包含允许您查看模拟结果的范围。
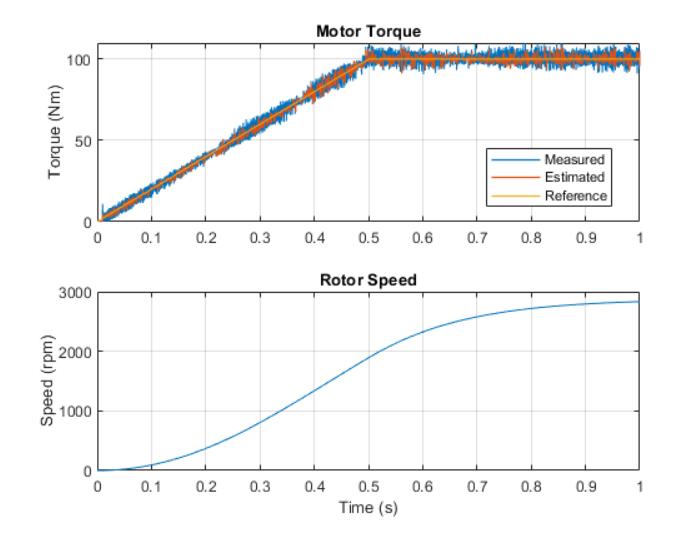
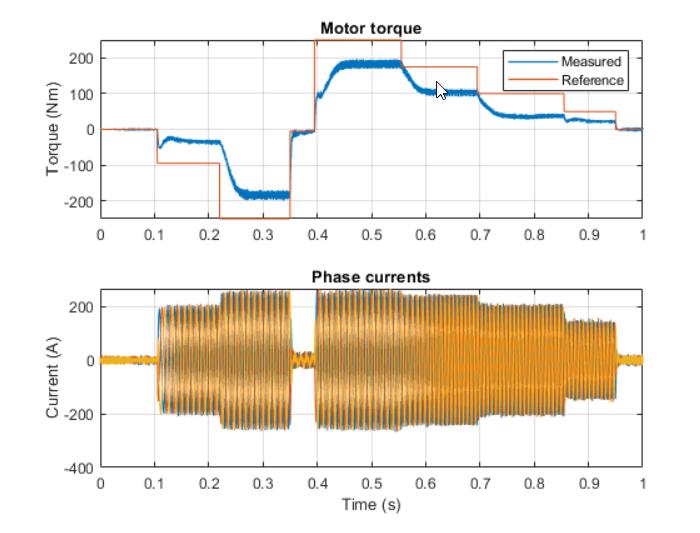
10 内置式永磁同步电机基于转矩的负载控制
IPMSM Torque-Based Load Control
这个例子展示了如何控制转矩在一个内部永磁同步电机(IPMSM)的基础上驱动。
高压电池供给IPMSM通过一个控制三相逆变器。 向电机控制器提供一个要求扭矩的斜坡。
负载转矩是二次依赖于转子转速。
控制子系统采用开环方法控制IPMSM的转矩,采用闭环方法控制电流。
在每一个采样瞬间,扭矩请求被转换为相关的电流参考。
当前控制是基于pi的,并使用比用于扭矩控制的速率更快的采样速率。 任务调度是在statflow®中设计的。 scope子系统包含允许您查看模拟结果的范围。
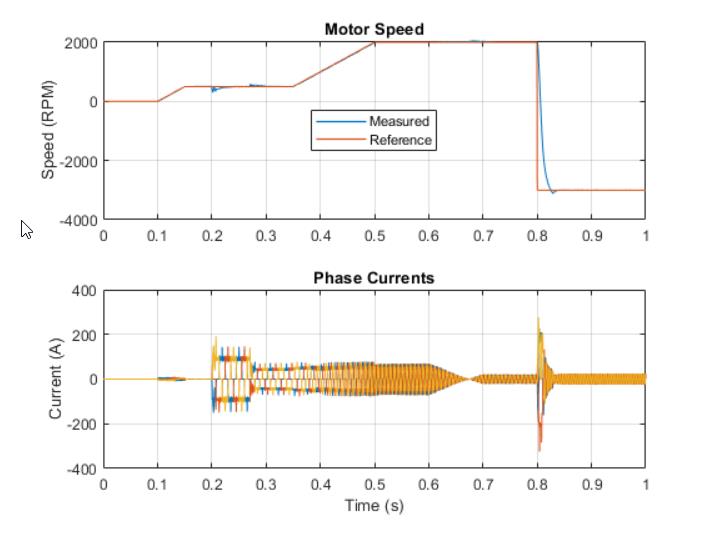
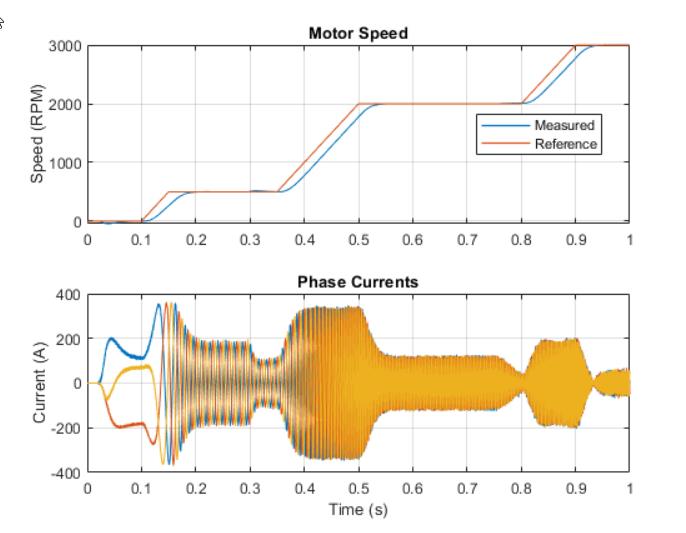
11 内置式永磁同步电机速度控制
这个例子展示了如何控制转子角速度内永磁体同步电机(IPMSM)基于汽车电牵引驱动。
高压电池通过一个可控的三相变频器供给IPMSM。
根据负载的不同,IPMSM可以以电动机和发电两种方式运行。
理想的扭矩源提供负载。
scope子系统包含允许您查看模拟结果的范围。
控制子系统包括基于多速率pi的串级控制结构,该结构具有一个外部角速度控制环和两个内部电流控制环。
Control子系统中的任务调度是作为statflow®状态机实现的。
在1秒的仿真中,角速度需求为0 rpm, 500 rpm, 2000 rpm,然后3000 rpm。 超过1630rpm, IPMSM进入磁场弱化模式。
12 永磁同步电机弱磁控制
PMSM Field-Weakening Control
这个例子展示了如何控制转子角速度高于名义速度在永磁同步电机(PMSM)基于电牵引驱动。
高压电池通过一个控制的三相变换器给PMSM供电。
控制子系统包括基于多速率pi的串级控制结构,该结构具有一个外部角速度控制环和两个内部电流控制环。
速度控制器产生一个转矩参考。 零d轴控制器将此转矩参考转换为当前参考。
磁场弱化控制器调整电流参考,以满足电压约束高于名义速度。
statflow®状态机在控制子系统中实现任务调度。 在0.7秒的模拟中,角速度需求从0到4000转/分。 在1630转/分以上,永磁同步电机进入磁场弱化模式。 scope子系统包含允许您查看模拟结果的范围。
13 永磁同步电机位置控制
PMSM Position Control
这个例子展示了如何控制转子的位置在一个基于永磁同步电机的电气驱动。
理想的扭矩源提供负载。
控制子系统采用级联控制结构,具有两个控制环,一个外环用于位置和速度控制,一个内环用于电流控制。
最优状态反馈线性二次型调节器控制位置和速度。
一个Luenberger观察者估计负载。
内部电流控制回路采用PI控制器实现。 永磁同步电机是由三相逆变器控制。 模拟使用步骤引用。 scope子系统包含允许您查看模拟结果的范围。
14 同步电机转矩控制
SM Torque Control
这个例子展示了如何控制扭矩的同步电机(SM)基于电牵引驱动。
高压电池供给SM通过一个控制三相变换器定子绕组和一个控制四象限斩波器转子绕组。
理想的角速度源提供了负载。
控制子系统使用开环方法来控制转矩和闭环方法来控制电流。
在每一个采样瞬间,扭矩请求被转换为相关的电流参考。
当前的控制是基于pi的。 仿真在电机和发电机模式下使用了几个转矩步骤。
任务调度是作为statflow®状态机实现的。 Visualization子系统包含允许您查看模拟结果的范围。
15 同步电机速度控制
SM Velocity Control
这个例子展示了如何控制转子角速度的同步电机(SM)基于电牵引驱动。
高压电池供给SM通过一个控制三相变换器定子绕组和一个控制四象限斩波器转子绕组。
理想的扭矩源提供负载。
控制子系统包括基于多速率pi的串级控制结构,该结构具有一个外部角速度控制环和三个内部电流控制环。
Control子系统中的任务调度是作为statflow®状态机实现的。 Visualization子系统包含允许您查看模拟结果的范围。
16 开关磁阻电机电流控制
Switched Reluctance Machine Current Control
这个例子展示了如何在开关磁阻电机(SRM)的基础上控制电流的幅度。
直流电压源通过一个控制的三臂电桥供给SRM。 理想的角速度源提供了负载。
变频器的通断角保持恒定。 基于pi的电流控制器调节电流的幅度。
17 开关磁阻电机速度控制
Switched Reluctance Machine Speed Control
这个例子展示了如何控制转子转速在开关磁阻电机(SRM)的基础上的电气驱动。
直流电压源通过一个控制的三臂电桥供给SRM。 变频器的通断角保持恒定。
18 同步电机状态空间控制
同步机状态空间控制
这个例子展示了如何控制电流在同步机(SM)的牵引驱动器使用状态空间控制。
高压电池供给SM通过一个控制三相变换器定子绕组和通过一个控制二象限斩波器转子绕组。
理想的角速度源提供了负载。
SM运行低于基本速度。
在每个样本瞬间,转矩请求被转换为相关的电流参考使用零d轴控制方法。
状态反馈控制器控制转子参考系中的电流。
Luenberger观测器得到速度相关的前馈预控制项。
仿真在电机和发电机模式下使用了几个转矩步骤。 任务调度是作为statflow®状态机实现的。 scope子系统包含允许您查看模拟结果的范围。
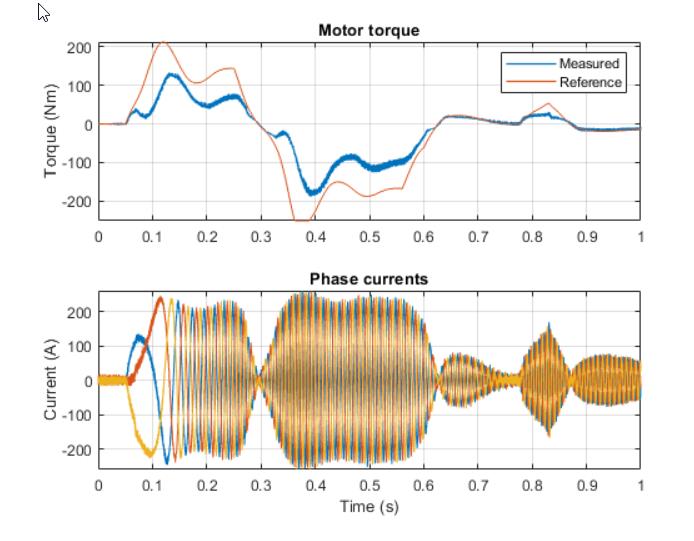
19 同步磁阻电机转矩控制
Synchronous Reluctance Machine Torque Control
这个例子展示了如何在一个同步磁阻电机(SynRM)的基础上的电气驱动控制转矩。
一个高压电池通过一个可控的三相转换器给SynRM供电。
理想的角速度源提供了负载。
控制子系统使用开环方法来控制转矩和闭环方法来控制电流。
在每个采样瞬间,使用每安培最大转矩策略(maximum torque per Ampere/MPTA)将转矩请求转换为相关的电流参考。
当前的控制是基于pi的。 仿真中使用了电机和发电机模式下的转矩步骤。 Visualization子系统包含允许您查看模拟结果的范围。
20 同步磁阻电机速度控制
Synchronous Reluctance Machine Velocity Control
这个例子展示了如何控制转子角速度在同步磁阻电机(SynRM)的基础上的电气驱动。
一个高压电池通过一个可控的三相转换器给SynRM供电。
理想的扭矩源提供负载。
控制子系统包括基于多速率pi的串级控制结构。
该控制结构具有一个外部角速度控制环和两个内部电流控制环。 Visualization子系统包含允许您查看模拟结果的范围。
21 有感三相异步电机驱动
Three-Phase Asynchronous Drive with Sensor Control
这个例子展示了如何控制和分析异步机(ASM)的运行使用传感器转子磁场定向控制。
该模型显示了主电路,以及包含控制、测量和范围的三个附加子系统。
控制子系统包含两个控制器:一个用于网侧变换器(AC/DC),一个用于机侧变换器(DC/AC)。
scope子系统包含两个时间范围:一个用于栅极转换器,一个用于ASM。 当模型被执行时,频谱分析仪打开并显示a相电源电流的频率数据。
22 无感三相异步电机驱动
Three-Phase Asynchronous Drive with Sensorless Control
这个例子展示了如何控制和分析异步机(ASM)的运行使用无传感器转子磁场定向控制。
该模型显示了主电路,以及包含控制、测量和范围的三个附加子系统。
控制子系统包含两个控制器:一个用于网侧变换器(AC/DC),一个用于机侧变换器(DC/AC)。
scope子系统包含两个时间范围:一个用于栅极转换器,一个用于ASM。 当模型被执行时,频谱分析仪打开并显示a相电源电流的频率数据。
23 三相永磁同步电机驱动
Three-Phase PMSM Drive
这个例子展示了用于典型混合动力汽车的永磁同步电机(PMSM)和逆变器的尺寸。
这里的逆变器是直接连接到车用蓄电池上的,但通常中间也有一个DC-DC转换器级。
该模型可用于永磁同步电机控制器的设计,选择结构和增益以达到预期的性能。
为了检查IGBT接通和关断的时间,IGBT器件可以直接被更详细的N-Channel IGBT块替代。
对于整车建模,伺服电机块可以用基于能量的模型抽象永磁同步电机、逆变器和控制器。
当使用变步长求解器时,Gmin电阻提供了一个非常小的对地电导,改善了模型的数值特性。
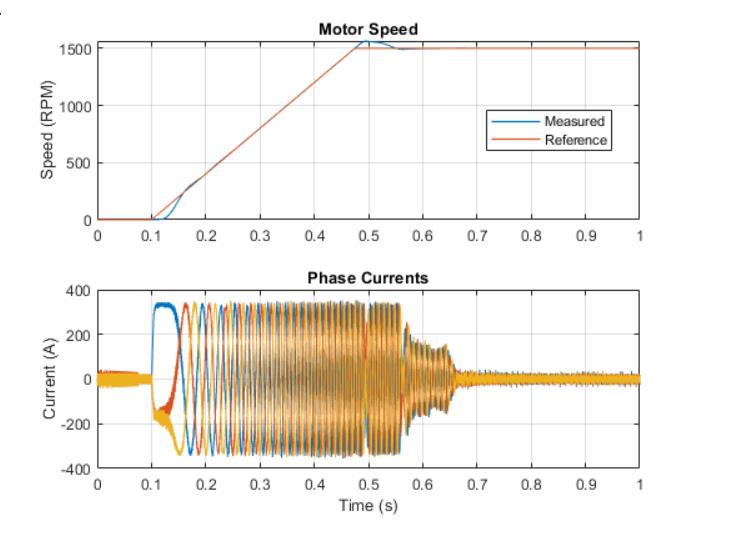
24 三相永磁同步牵引驱动
Three-Phase PMSM Traction Drive
这个例子展示了如何控制转子转速在永磁同步电机(PMSM)的基础上电牵引驱动。
高压电池通过一个可控的三相变频器供给fem参数化的PMSM块。
一个旋转摩擦块提供了负载。
位置和速度信息是通过高保真分解器获得的。
永磁同步电机控制器子系统包括一个串级控制结构,该结构具有一个外部速度控制环和两个内部电流控制环。 在0.3秒的模拟中,转子转速需求从0到1000转/分。

25 三相同步电机控制
Three-Phase Synchronous Machine Control
这个例子展示了如何控制和初始化同步电机(SM)。
测试电路显示SM作为一个发电机工作。 终端电压由AVR控制,速度由调速器控制。
要查看SM机器基础值和初始条件,右键单击同步机圆转子(标准)块,选择“电气”,然后选择“显示基础值”,“显示相关基础值”,或“显示相关初始条件”。 整个模型初始化为周期稳态启动,提供250mw / 15mvar负荷。
26 三相同步电机驱动
Three-Phase Synchronous Machine Drive
这个例子显示了如何控制转子转速在同步电机(SM)的基础上的电气驱动。
高压电池供给SM通过一个控制三相变换器定子绕组和通过一个控制二象限斩波器转子绕组。
利用该模型设计SM控制器,选择结构和增益以达到预期的性能。
scope子系统包含允许您查看模拟结果的范围。
结论
通常情况下,PMSM和BLDC的在实际中的应用更加广泛,可以重点关注这两种电机的仿真。
以上是关于simulink官方电机控制示例汇总的主要内容,如果未能解决你的问题,请参考以下文章