时间序列的建模新思路:清华李飞飞团队等提出强记忆力E3D-LSTM网络
Posted AI科技大本营
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了时间序列的建模新思路:清华李飞飞团队等提出强记忆力E3D-LSTM网络相关的知识,希望对你有一定的参考价值。
作者 | Yunbo Wang,、Lu Jiang、 Ming-Hsuan Yang、Li-Jia Li、Mingsheng Long、Li Fei-Fei
出品 | AI科技大本营(ID:rgznai100)
【导读】如何对时间序列进行时空建模及特征抽取,是RGB视频预测分类,动作识别,姿态估计等相关领域的研究热点。清华大学、Google AI 和斯坦福大学李飞飞团队提出了一种具有强记忆力的E3D-LSTM网络,用3D卷积代替2D卷积作为LSTM网络的基础计算操作,并加入自注意力机制,使网络能同时兼顾长时和短时信息依赖以及局部时空特征抽取。这为视频预测、动作分类等相关问题提供了新思路,是一项非常具有启发性的工作。
https://openreview.net/pdf?id=B1lKS2AqtX
现实生活中许多数据都同时具有时间特征和空间特征
,例如人体的运动轨迹,连续帧的视频等,每个时间点都对应一组数据,而数据往往又具有一定的空间特征。因此要在这样的时间序列数据上开展分类,预测等工作,就必须在时间(temporal)和空间(spatial)上对其进行建模和特征抽取。
常用的时间建模工具
是循环神经网络(RNN)相关模型(LSTM等),由于其特有的门结构设计,对时间序列特征具有强大的抽取能力,因此被广泛应用于预测问题并取得了良好的成果,但是RNN并不能很好的学习到原始特征的高阶表示,这不利于对空间信息的提取。空间建模则当属卷积神经网络(CNN),其具有强大的空间特征抽取能力,其中3D-CNN又能将卷积核可控范围扩大到时域上,相对于2D卷积灵活性更高,能学习到更多的运动信息(motion信息),相对于RNN则更有利于学习到信息的高级表示(层数越深,信息越高级),是目前动作识别领域的流行方法。当然3D卷积的时间特征抽取能力并不能和RNN媲美。
得益于3D卷积和RNN在各自领域的成功,如何进一步将二者结合起来使用也成为了研究热点,常见的简单方法是将二者串联堆叠或者并联结合(在图卷积网络出现之前,动作识别领域的最优方法就是将CNN和RNN并联),但测试发现这么做并不能带来太大的提升,这是因为二者的工作机制差距太大,简单的结合并不能很好的实现优势互补。本文提出用3D卷积代替原始LSTM中的门更新操作,使LSTM不仅能在时间层面,也能在空间层面上进行短期依赖的表象特征和运动特征的抽取,从而在更深的机制层面实现两种网络的结合。此外,在LSTM中引入自注意力(self-attention)机制,进一步强化了LSTM的长时记忆能力,使其对长距离信息作用具有更好的感知力。作者将这种网络称为Eidetic 3D LSTM(E3D-LSTM),Eidetic意思是具有逼真记忆,强调网络的强记忆能力。
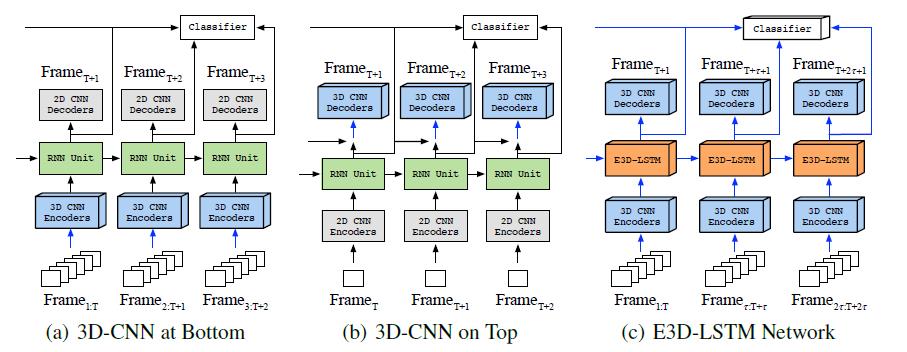
图中每个颜色的模块都代表了多层相应的网络。图(a)和图(b)是两种3D卷积和LSTM结合的基线方法,3D卷积和LSTM线性叠加,主要起到了编码(解码器)的作用,并没有和RNN有机制上的结合。图(a)中3D卷积作为编码器,输入是一段视频帧,图(b)中作为解码器,得到每个单元的最终输出。这两个方法中的绿色模块使用的是时空长短时记忆网络(ST-LSTM)[1],这种LSTM独立的维护两个记忆状态M和C,但由于记忆状态C的遗忘门过于响应具有短期依赖的特征,因此容易忽略长时依赖信息,因此E3D-LSTM在ST-LSTM的基础添加了自注意力机制和3D卷积操作,在一定程度上解决了这个问题。具体单元结构下一节介绍。
图(c)是E3D-LSTM网络的结构,3D卷积作为编码-解码器(蓝色模块),同时和LSTM结合(橙色模块)。E3D-LSTM既可用于分类任务,也可用于预测任务。分类时将所有LSTM单元的输出结合,预测时则利用3D卷积解码器的输出作为预测值。
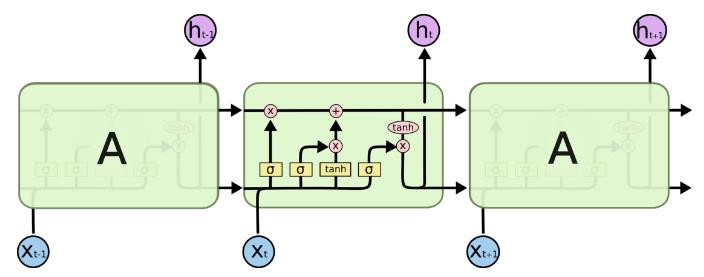
首先简要介绍一下标准LSTM结构,和RNN相比LSTM增加了更复杂的门结构(图中黄色模块),主要解决RNN中存在的梯度消失问题,从而提高网络对长时依赖(long-term dependency)的记忆感知能力。LSTM有两个输入门
 ,一个输出门
,一个输出门
 和遗忘门
和遗忘门
 。
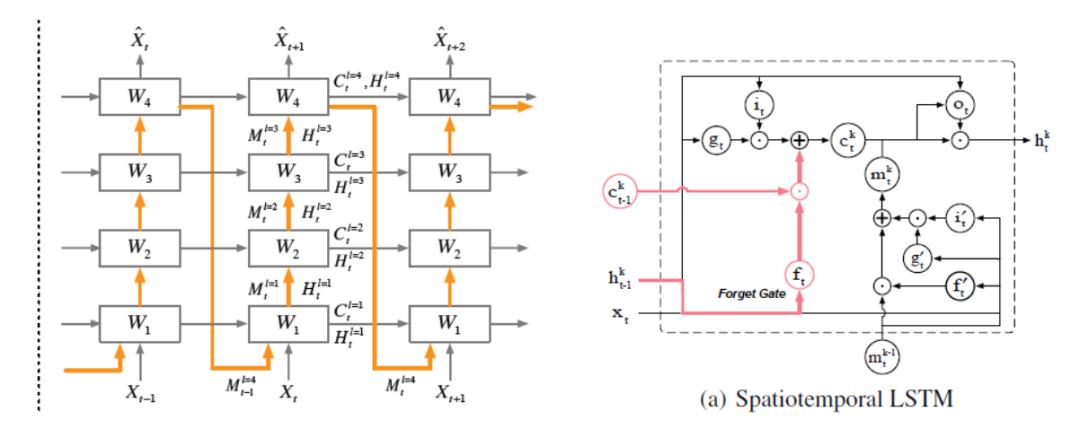
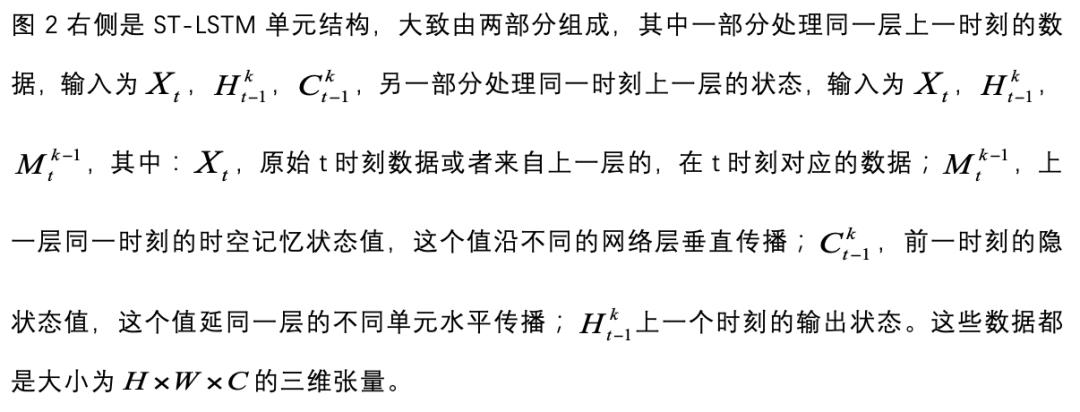
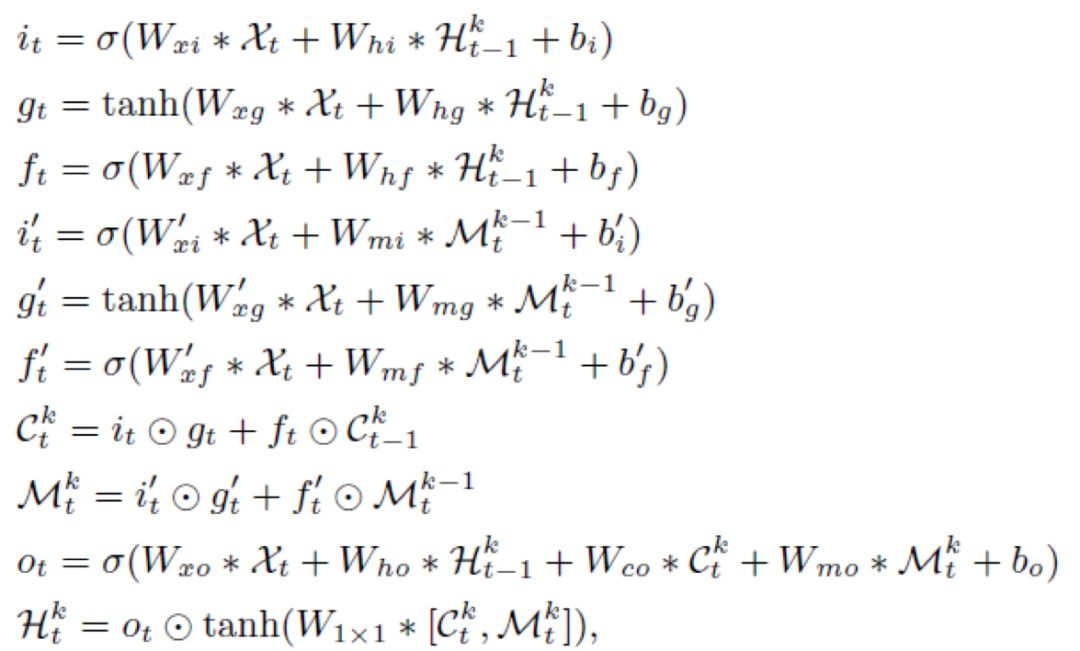
和标准LSTM相比,ST-LSTM还增加了不同层间对应位置的cell连接,如图2左侧,水平灰色连接线表示标准LSTM的单元连接,竖直黄色连接线表示层间同一时刻的单元连接,通过张量M传播,注意当l=1时,
。
和标准LSTM相比,ST-LSTM还增加了不同层间对应位置的cell连接,如图2左侧,水平灰色连接线表示标准LSTM的单元连接,竖直黄色连接线表示层间同一时刻的单元连接,通过张量M传播,注意当l=1时,
 (作者认为t时刻的顶层信息对t+1时刻的底层信息影响很大),这样记忆信息就能同时在层内和层间传播。
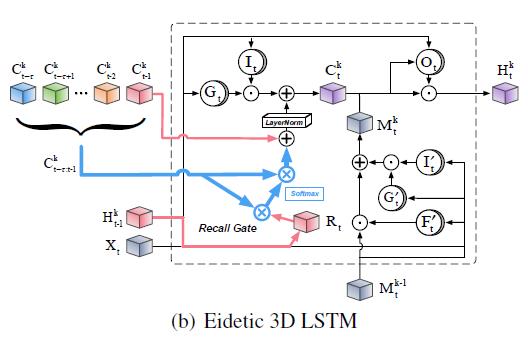
图3 是本文提出的E3D-LSTM模型的单元结构,
(作者认为t时刻的顶层信息对t+1时刻的底层信息影响很大),这样记忆信息就能同时在层内和层间传播。
图3 是本文提出的E3D-LSTM模型的单元结构,
 是一个维度为
是一个维度为
 的五维张量,代表之前
的五维张量,代表之前
 个时间步的所有隐状态。
个时间步的所有隐状态。
 表示召回门(代替遗忘门),和ST-LSTM相比,主要有以下改进:
1、输入数据是
表示召回门(代替遗忘门),和ST-LSTM相比,主要有以下改进:
1、输入数据是
 的四维张量,对应时刻
的四维张量,对应时刻
 的连续帧序列,因此现在每个单元时间步都对应一段视频,而不是单帧视频。
2、针对帧序列数据额外添加了一个召回门(recall gate)以及相关结构,用于实现长时依赖学习,也就是自注意力机制。这部分对应网络名称中的Eidetic。
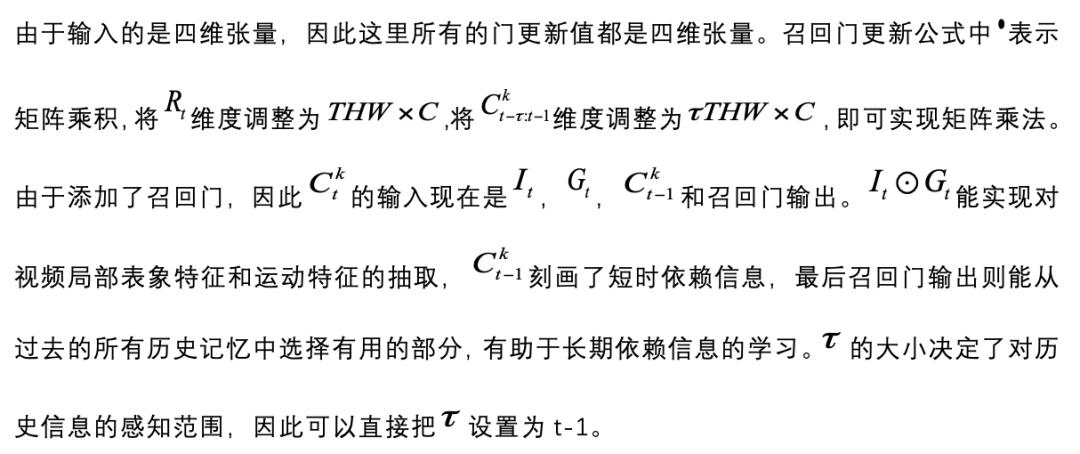
3、由于输入数据变成了四维张量,因此在更新公式中采用3D卷积操作而不是2D卷积。
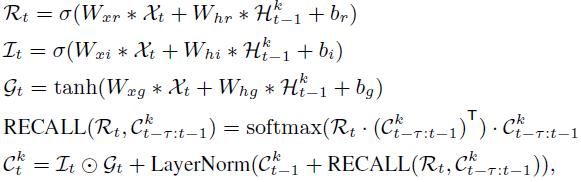
大部分门结构的更新公式和ST-LSTM相同,额外添加了召回门更新公式:
的连续帧序列,因此现在每个单元时间步都对应一段视频,而不是单帧视频。
2、针对帧序列数据额外添加了一个召回门(recall gate)以及相关结构,用于实现长时依赖学习,也就是自注意力机制。这部分对应网络名称中的Eidetic。
3、由于输入数据变成了四维张量,因此在更新公式中采用3D卷积操作而不是2D卷积。
大部分门结构的更新公式和ST-LSTM相同,额外添加了召回门更新公式:
上面介绍的机制用于同一层不同时间步连接,作者将这种机制也用在了不同层同一时间步的连接,但效果并不好,这是因为不同层在同一时刻学习到的信息并没有太好的依赖性。
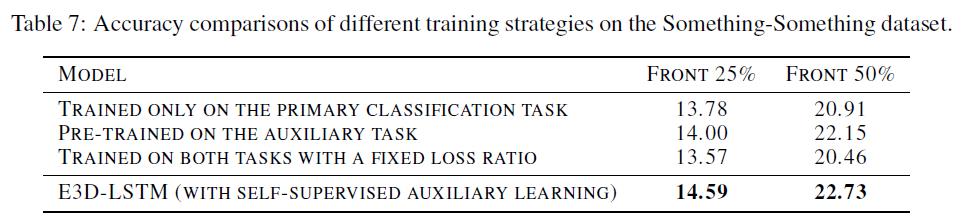
在许多监督学习任务,例如视频动作识别中,没有足够的监督信息和标注信息来帮助训练一个令人满意的RNN,因此可以将视频预测作为一个辅助的表征学习方法,来帮助网络更好的理解视频特征,并提高时间域上的监督性。
具体的,让视频预测和动作识别任务共享相同的主干网络(图1),只不过损失函数不同,在视频预测任务中,目标函数为:
带上标的X表示预测值,不带上标的表示真值,F表示Frobenius归一化。
其中Y和
 是预测值和帧值,这样通过将预测任务的损失函数嵌入到识别任务中,以及主干网络的共享,能在一定程度上帮助识别任务学习到更多的时序信息。为了保证过渡平滑,额外添加了一个权重因子
是预测值和帧值,这样通过将预测任务的损失函数嵌入到识别任务中,以及主干网络的共享,能在一定程度上帮助识别任务学习到更多的时序信息。为了保证过渡平滑,额外添加了一个权重因子
 ,
会随着迭代次数的增加而线性衰减:
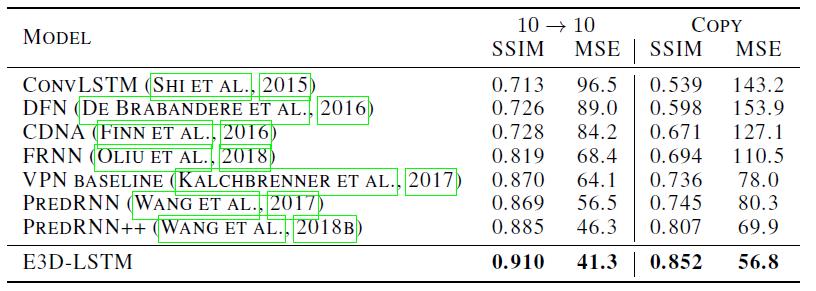
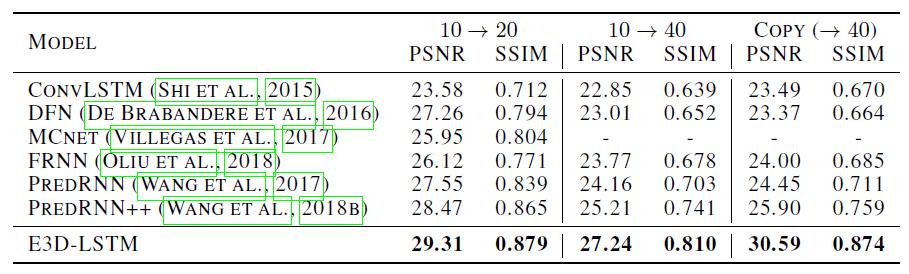
视频预测任务,在Moving MINIST数据集上的结果:
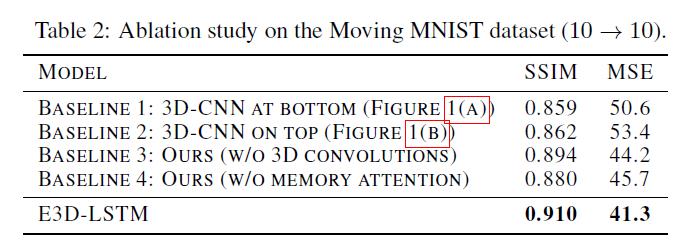
为了验证E3D-LSTM中不同模块对性能的影响,作者还在该数据集上进行了烧蚀研究:
,
会随着迭代次数的增加而线性衰减:
视频预测任务,在Moving MINIST数据集上的结果:
为了验证E3D-LSTM中不同模块对性能的影响,作者还在该数据集上进行了烧蚀研究:
可以看到不管是添加3D卷积还是自注意力机制,网络性能相对于基线方法都有提升。
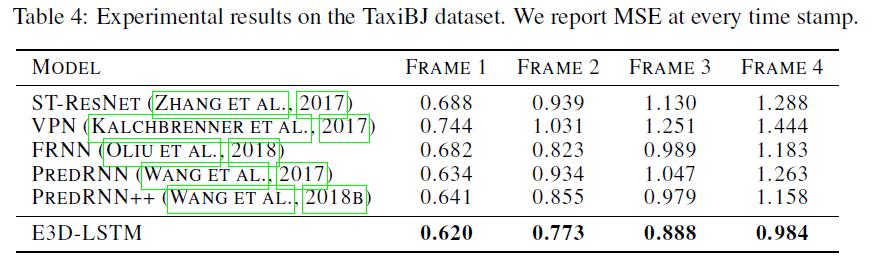
接下来在一个实际视频预测任务:交通流预测中,与其他方法进行了对比:
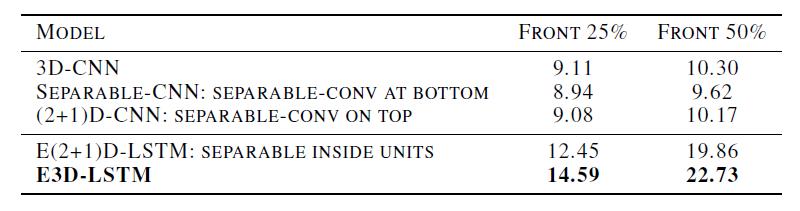
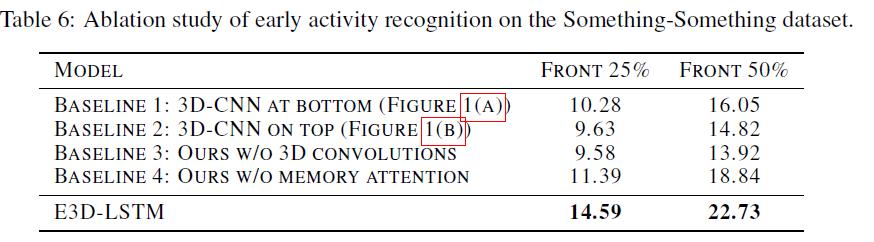
动作识别任务,在Something-Something数据集上进行了测试:
本文对ST-LSTM进行了改进,将流行的3D卷积操作作为其基本张量操作,同时添加了自注意力模块,进一步强化了网络对长距离依赖信息的刻画能力,不仅能用于预测任务,还能通过辅助学习的方法拓展到其他任务上,是非常具有启发性的工作。
[1] Yunbo Wang, Mingsheng Long, Jianmin Wang, Zhifeng Gao, and S Yu Philip. Predrnn: Recurrent neural networks for predictive learning using spatiotemporal lstms. In NIPS, 2017.
(*本文为 AI科技大本营原创文章,转载请联系微信 1092722531)
扫码添加小助手,回复:大会,加入福利群,参与抽奖送礼!

AI ProCon 2019 邀请到了亚马逊首席科学家@李沐,在大会的前一天(9.5)亲授「深度学习实训营」
,通过动手实操,帮助开发者全面了解深度学习的基础知识和开发技巧。还有
9大技术论坛、60+主题分享,百余家企业、千余名开发者共同相约 2019 AI ProCon!
5折优惠票抢购中!
推荐阅读
以上是关于时间序列的建模新思路:清华李飞飞团队等提出强记忆力E3D-LSTM网络的主要内容,如果未能解决你的问题,请参考以下文章
李飞飞团队提出零样本泛化的技术,性能超越SOTA!
李飞飞团队提出零样本泛化的技术,性能超越SOTA!
刚刚,2021 ACM Fellow放榜!李飞飞谢涛刘铁岩等13名华人学者当选
对话阿里云李飞飞:数据库迎来开源新时代 | 《新程序员》
对话阿里云李飞飞:数据库迎来开源新时代 | 《新程序员》
李飞飞团队将ViT用在机器人身上,规划推理最高提速512倍,还cue了何恺明的MAE...