合作式智能运输系统-车用通信系统应用层及应用数据交互标准 第一阶段2020
Posted 爱是与世界平行
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了合作式智能运输系统-车用通信系统应用层及应用数据交互标准 第一阶段2020相关的知识,希望对你有一定的参考价值。
团体标准 合作式智能运输系统 车用通信系统应用层及应用数据交互标准(第一阶段)
T/CASE 53-2020 代替T/CASE 53-2017
1 范围
本文件规定了合作式智能运输系统车用通信系统应用层的术语和定义,以及数据集和数据交互标准及接口规范等内容。
本文件适用于基于各种通信方式的车用通信系统应用场景开发、验证及商用。
2 规范性引用文件
下列文件中的内容通过文中的规范性引用而构成本文件必不可少的条款。其中,注日期的引用文件,仅该日期对应的版本适用于本文件:不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB 5768一2009 道路交通标志与标线
GB/T 16262.1一2006 信息技术抽象语法记法一 (ASN.1) 第1部分:基本记法规范
GB/T 16262.2一2006 信息技术抽象语法记法一(ASN.1) 第2部分:信息客体规范
GB/T 16262.3一2006 信息技术抽象语法记法一(ASN.1) 第3部分:约束规范
GB/T 16262.4-2006 信息技术抽象语法记法一(ASN.1)》 第4部分:ASN.1规范的参数化
GB/T 16263.2一2006 信息技术ASN.1编码规则 第2部分:紧缩编码规则(PER)规范
GB25280一2016 道路交通信号控制机
YD/T 3709一2020 基于LTE的车联网无线通信技术消息层技术要求
ETSI TS 102 637 智能交通系统 车辆通信系统 基本应用集(Intelligent Transportation Systems(ITS):Vehicular Communications:Basic Set of Applications)
SAE J2735 专用短程通信消息集字典(Dedicated Short Range Communications(DSRC)Message Set Dictionary)
SAEJ2945/1 V2V车载安全通信系统性能需求(0n-Board System Requirements for V2 V Safety Communications)
3 术语和定义
3.1 定义
下列术语和定义适用于本文件。
3.1.1 合作式智能运输系统cooperative intel ligent transportation systems,(C-ITS)
合作式智能运输系统是通过人、车、路信息交互,实现车辆和基础设施之间、车辆与车辆之间、车辆与人之间的智能协同与配合的一种智能运输系统。
3.1.2 系统延迟 system delay
从远车或路侧单元等设备发送通信数据后,到主车接收该数据并通过网络层进行信息处理后传递给应用层的时间。本文件中特指应用层端到端的延迟时间。
3.1.3 主车host vehicle,HW
装有车载单元且运行应用程序的目标车辆。
3.1.4 远车remote vehicle,R
与主车配合能定时广播V2X消息的背景车辆。
3.1.5 车载单元on-board unit,0BU
安装在车辆上的可实现V2X通信,支持V2X应用的硬件单元。
3.1.6 路侧单元road side unit,RSU
安装在路边的可实现V2X通信,支持V2X应用的硬件单元。
3.1.7 V2X
车载单元与其他设备通信,包括但不限于车载单元之间通信(V2V),车载单元与路侧单元通信(V2I),车载单元与行人设备通信(V2P),车载单元与网络之间通信(V2N)。
3.2 缩略语
下列缩略语适用于本文件。
4G:第四代移动通信技术(the4 th Generation mobile communication technology)
5G:第五代移动通信技术(the5 th Generation mobile communication technology)
ABS:制动防抱死系统(Anti-lock Braking System)
ADS:应用数据交换服务(Application Data-Exchange Service)
API:应用程序编程接口(Application Programming Interface)
ASN.l:抽象语法记法(Abstract Syntax Notation One)
AVW:异常车辆提醒(Abnormal Vehicle Warning)
BSM:基本安全消息(Basic Safety Message)
BSW:盲区预警(Blind Spot Warning)
CAV:防撞距离(Collision Avoidance Range)
CLW:车辆失控预警(Control Lost Warning)
CSAE:中国汽车工程学会(Society of Automotive Engineers of China)
C-ITS:中国智能交通产业联盟(China ITS Industry Alliance)
DE:数据元素(Data Element)
DF:数据帧(Data Frame)
DME:专用短程通信管理实体(DSRC Management Entity)
DNPW:逆向超车预警(Do Not Pass Warning)
DSM:专用短程通信短消息(DSRC Short Message)
DSRC:专用短程通信(Dedicated Short Range Communications)
DTI:到交叉口的距离(Distance-to-Intersection)
EBW:紧急制动预警(Emergency Brake Warning)
ESP:车身电子稳定系统(Electronic Stability Program)
ETC:电子不停车收费系统(Electronic Tol1 Collection)
ETSI:欧洲电信标准化协会(European Telecommunications Standards Institute)
EVW:紧急车辆提醒(Emergency Vehicle Warning)
FCW:前向碰撞预警(Forward Collision Warning)
GB:中国国家标准(Guo Biao(Nation Standard))
GLOSA:绿波车速引导(Green Light Optimal Speed Advisory)
GNSS:全球导航卫星系统(Global Navigation Satellite System)
GPS:全球定位系统(Global Positioning System)
HLN:道路危险状况预警(Hazardous Location Warning.)
HMI:人机交互界面(Human Machine Interface)
HV:主车(Host Vehicle)
ICW:交叉路口碰撞预警(Intersection Collision Warning)
ID:标识(Identification)
IS0:国际标准化组织(International Standards0 rganization)
ITS:智能交通系统(Intelligent Transportation Systems)
IVS:车内标牌(In-Vehicle Signage)
LCW:变道预警(Lane Change Warning)
LDW:车道偏离预警(Lane Departure Warning)
LTA:左转辅助(Left Turn Assistant)
LTE-V2X:基于LTE的车联网无线通信技术(LTE Vehicle to Everything)
NHTSA:美国高速公路安全管理局(National Highway Traffic Safety Administration)
OBU:车载单元(On-Board Unit)
P2P:点对点(Point to Point)
RSA:路侧单元发布的交通事件消息(Road Side Alert)
RSM:路侧单元消息(Road Side Message)
RSU:路侧单元(Road Side Unit)
RV:远车(Remote Vehicle)
SAE:美国汽车工程师学会(Society of Automotive Engineers)
SLW:限速预警(Speed Limit Warning)
SPAT:信号灯消息(Signal Phase and Timing Message)
SPI:服务提供者接口(Service Provider Interface)
SVW:闯红灯预警(Signal Violation Warning)
TC:目标分类(Target Classification)
TCS:牵引力控制系统(Traction Control System)
TJW:前方拥堵提醒(Traffic Jam Warning)
TTC:碰撞预计时间(Time-to-Collision)
TTI:到达交叉口预计时间(Time-to-Intersection)
UPER:非对齐压缩编码规则(Unaligned Packet Encoding Rules)
V2I:车载单元与路侧单元通信(Vehicle to Infrastructure)
V2P:车载单元与行人设备通信(Vehicle to Pedestrians)
V2V:车载单元之间通信(Vehicle to Vehicle)
V2X:车载单元与其他设备通信(Vehicle to Everything)
VIN:车辆识别码(Vehicle ID Number)
VNFP:汽车近场支付(Vehicle Near-Field Payment)
VRUCW:弱势交通参与者碰撞预警(Vulnerable Road User Collision Warning)
4 合作式智能运输系统车用通信系统
4.1 系统介绍
合作式智能运输系统车用通信系统,旨在通过智能运输系统各子系统之间的信息交互,实现道路安全、通行效率、信息服务等各类应用。为此,不同厂商车辆之间,以及这些车辆与其所能到达的区域范围内的道路基础设施之间,必须实现互联互通。本文件的目的,是通过定义信息交互的消息集、数据帧与数据元素,来实现车用通信系统在应用层的互联互通。

图1以车用通信系统中的车载单元(0BU)为例说明该系统的架构。车载设备通常包括了以下子系统:无线电通信子系统:接收和发送空中信号。一个车载设备里可以装配一个或者多个无线电通信子系统:
——定位系统:该子系统通常包含全球导航卫星系统(GNSS,Global Navigation Satellite System)接收器,用以提供车辆的位置、方向、速度和时间等信息。该子系统可以通过车速信号、惯性测量单元、差分定位系统等技术来实现增强定位:
——车载设备处理单元:运行程序以生成需要发送的空中信号,以及处理接收的空中信号;
——天线:实现射频信号的接收和发送。
车载设备通过接口与应用电子控制单元相连,应用电子控制单元中运行程序实现车用通信系统的应用,并通过人机交互界面(HMI,Human Machine Interface)来实现对驾驶员的提醒,包括图像、声音、振动等方式。在某些场合,应用电子控制单元和车载设备处理单元在一个物理设备中实现。
4.2 标准范围
参考国际标准化组织(IS0)制定的通信系统七层参考模型,及美国、欧洲正在制定的车用通信系统相关标准的系统架构,车用通信系统通常可以分为系统应用、应用层、传输层、网络层、数据链路层和物理层。
本文件关注应用层及应用层与上下相邻两层的数据交互接口(如图2)。
应用层协议主要包括消息集和消息集内的数据帧与数据元素,以及消息的数据结构和编码方式。
本文件通过对道路安全、通行效率和信息服务等基础应用的分析,定义在实现各种应用时,车辆与其他车辆、道路交通设施及其他交通参与者之间的信息交互内容、交互协议与接口等。
本文件并不指定底层的通信技术,可以用于各种不同的传输层、网络层和数据链路层、物理层。
本文件通过向上制定与系统应用对接的应用编程接口(API),可以让不同的应用开发者独立开发能实现互联互通的应用,而无需担心使用何种通信方式或者通信设备,同时通过向下制定与不同通信设备对接的服务提供接口(SPI),以实现车用通信系统与不同通信方式或者通信设备的兼容,并满足通信技术不断更新的需求。

5 车用通信系统基础应用
5.1 需求分析
本文件选择涵盖安全、效率、信息服务三大类的17个典型应用作为一期应用。选择过程详见附录A。
表1为本文件选择的17个一期应用列表。

5.2 应用定义及基本要求
5.2.1总则
本节从应用定义、主要场景、系统基本原理、通信方式、基本性能要求和数据交互需求六个方面对17个一期应用分别进行描述,并根据各应用对通信频率和时延的不同需求,对应用进行分类(见附录B)。
5.2.2 前向碰撞预警
5.2.2.1 应用定义和预期效果
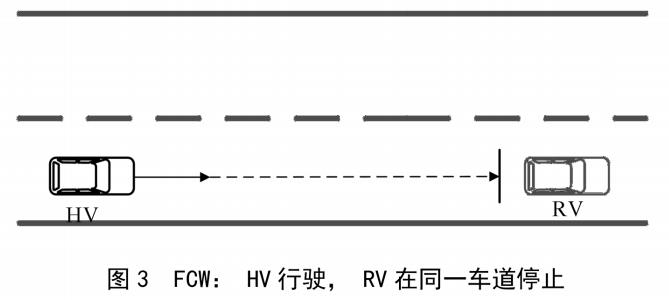
前向碰撞预警(FCW:Forward Collision Warning)是指,主车(HV)在车道上行驶,与在正前方同一车道的远车(RV)存在追尾碰撞危险时,FCW应用将对HV驾驶员进行预警。本应用适用于普通道路或高速公路等车辆追尾碰撞危险的预警。
FCW应用辅助驾驶员避免或减轻前向碰撞,提高道路行驶安全。
5.2.2.2 主要场景
FCW包括如下主要场景:
a)HV行驶,RV在HV同一车道正前方停止(图3):
1)HV正常行驶,RV在位于HV同一车道的正前方停止;
2)HV和RV需具备短程无线通信能力;
3)HV行驶过程中在即将与RV发生碰撞时,FCW应用对HV驾驶员发出预警,提醒驾驶员与位于正前方的车辆RV存在碰撞危险;
4)预警时机需确保HⅣ驾驶员收到预警后,能有足够时间采取措施,避免与RV发生追尾碰撞。
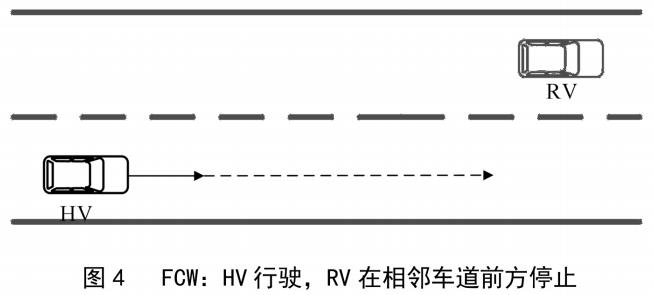
b)HV行驶,RV在HV相邻车道前方停止(图4):
1)HV正常行驶,RV在位于HV相邻车道的前方停止;
2)HV和RV需具备短程无线通信能力:
3)HV行驶过程中不会与RV发生碰撞,HV驾驶员不会收到FCW预警信息。
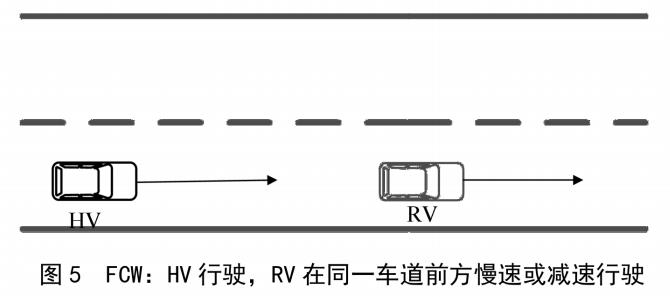
c)HV行驶,RV在HV同一车道正前方慢速或减速行驶(图5):
1)HV正常行驶,RV位于HV同一车道的正前方慢速或减速行驶;
2)HV和RV需具备短程无线通信能力:
3)HV行驶过程中在即将与RV发生碰撞时,FCW应用对HV驾驶员发出预警,提醒驾驶员与位于正前方的车辆RV存在碰撞危险;
4)预警时机需确保V驾驶员收到预警后,能有足够时间采取措施,避免与RV发生追尾碰撞。
d)HV行驶,HV视线受阻,RV-1在HV同一车道正前方停止(图6):
1)HV跟随RV-2正常行驶,RV-1在同一车道上RV-2的正前方停止,HV的视线被RV-2所遮挡:
2)HV和RV-1需具备短程无线通信能力,RV-2是否具备短程无线通信能力不影响应用场景的有效性;
3)RV-2为了避开RV-1进行变道行驶;
4)HV行驶过程中在即将与RV-1发生碰撞时,FCW应用对HV驾驶员发出预警,提醒驾驶员与位于正前方的RV-1存在碰撞危险;
5)预警时机需确保HV驾驶员收到预警后,能有足够时间采取措施,避免与RV-1发生追尾碰撞。

5.2.2.3 系统基本原理
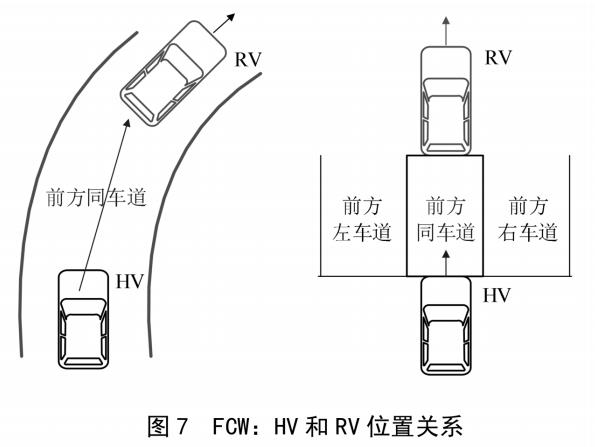
HV行驶过程中,若与同一车道前方RV存在碰撞危险时,FCW应用对HV驾驶员进行预警。触发FCW功能的HV和RV位置关系如图7,其中HV和RV在同一车道,RV在HV的前方。该应用在直线车道或者弯道车道均有效。
FCW基本工作原理如下:
——分析接收到的RV消息,筛选出位于同一车道前方(前方同车道)区域的RV:
——进一步筛选处于一定距离范围内的V作为潜在威胁车辆:
——计算每一个潜在威胁车辆碰撞时间(TTC:time-to-col1 ision)或防撞距离(collisionavoidance range),筛选出与HV存在碰撞危险的威胁车辆;
——若有多个威胁车辆,则筛选出最紧急的威胁车辆;
——系统通过HMI对HV驾驶员进行相应的碰撞预警。
5.2.2.4 通信方式
HV和RV需具备短程无线通信能力,车辆信息通过短程无线通信在HV和RV之间传递(V2V)。
5.2.2.5 基本性能要求
FCW基本性能要求如下(指标依据参见附录C):
一一主车车速范围(0~130)km/h:
一一通信距离≥300m;
一一数据更新频率典型值10Hz;
一一系统延迟≤100ms;
——定位精度≤1.5m。
5.2.2.6 数据交互需求
FCW数据交互需求如表2。
表2 FCW数据交互需求(远车数据)
| 数据 | 单位 | 备注 |
|---|---|---|
| 时刻 | ms | — |
| 位置(经纬度) | deg | — |
| 位置(海拔) | m | — |
| 车头方向角 | deg | — |
| 车体尺寸(长、宽) | m | — |
| 速度 | m/s | — |
| 三轴加速度 | m/s2 | — |
| 横摆角速度 | deg/s | — |
5.2.3 交叉路口碰撞预警
5.2.3.1 应用定义和预期效果
交叉路口碰撞预警(ICW:Intersection Collision Warning)是指,主车(HV)驶向交叉路口,与侧向行驶的远车(RV)存在碰撞危险时,ICW应用将对HV驾驶员进行预警。本应用适用于城市及郊区普通道路及公路的交叉路口、环道的入口、高速路入口等交叉路口的碰撞危险的预警。
ICW应用辅助驾驶员避免或减轻侧向碰撞,提高交叉路口通行安全。
5.2.3.2主要场景
ICW包括如下主要场景:
a)HV在路口起步(图8):
1)HV停止在路口,RV-1从HV左侧或右侧驶向路口,HV的视线可能被出现在路口的RV-2所遮挡;
2)HV和RV-1需具备短程无线通信能力,RV-2是否具备短程无线通信能力不影响应用场景的有效性;
3)HV启动并准备进入路口时,ICW应用对HV驾驶员发出预警,提醒驾驶员与侧向来车RV-1存在碰撞危险;
预警时机需确保HV驾驶员收到预警后,能有足够时间采取措施,避免与RV-1发生碰撞。

b)HV和RV同时驶向路口(图9):
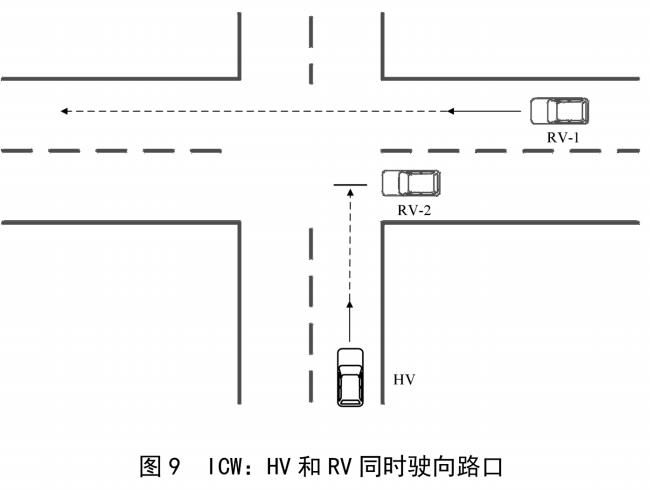
1)HV驶向路口,同时RV-1从V左侧或右侧驶向路口,V的视线可能被出现在路口的RV-2所遮挡;
2)HV和RV-1需具备短程无线通信能力,RV-2是否具备短程无线通信能力不影响应用场景的有效性;
3)当HV驶近路口时,ICW应用对HV驾驶员发出预警,提醒驾驶员与侧向来车RV-1存在碰撞危险:
4)预警时机需确保HV驾员收到预警后,能有足够时间采取措施,避免与RV-1发生碰撞。
5.2.3.3系统基本原理
HV驶向交叉路口,若与任意一辆驶向同一路口的RV存在碰撞危险时,ICW应用对HV驾驶员进行预警。
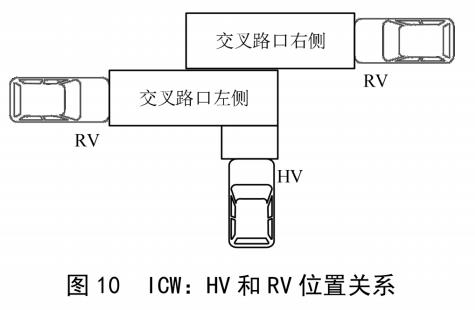
触发ICW功能的HV和RV位置关系如图10,其中HV和RV行驶方向不限于垂直交叉(90°),可为一定范围内的多角度交叉。
ICW基本工作原理如下:
一一分析接收到的RV消息,筛选出位于交叉路口左侧(Intersecting Left)或交叉路口右侧(Intersecting Right)区域的RV。RV消息可能是由RV发出或从路侧单元获取;
——进一步筛选处于一定距离范围内的RV作为潜在威胁车辆;
——计算每一个潜在威胁车辆到达路口的时间(TTI:time-to-intersection)和到达路口的距离(DTI:distance–to-intersection),筛选出与HV存在碰撞危险的威胁车辆;
——若有多个威胁车辆,则筛选出最紧急的威胁车辆;
——系统通过HMI对HV驾驶员进行相应的碰撞预警。
5.2.3.4通信能力
HV和RV需具备短程无线通信能力,车辆信息通过短程无线通信在HV和RV之间传递(V2V);利用具备短程无线通信能力的路侧设备直接探测碰撞危险或远车信息,发送给主车(V2I)。
5.2.3.5基本性能要求
ICW基本性能要求如下:
一一主车车速范围(0~70)km/h:
——通信距离≥150m:
——数据更新频率典型值10Hz;
——系统延迟≤100ms;
——定位精度≤1.5m。
5.2.3.6数据交互需求
ICW数据交互需求如表3。
表3 ICW数据交互需求(远车数据)
| 数据 | 单位 | 备注 |
|---|---|---|
| 时刻 | ms | — |
| 位置(经纬度) | deg | — |
| 位置(海拔) | m | — |
| 车头方向角 | deg | — |
| 车体尺寸(长、宽) | m | — |
| 速度 | m/s | — |
| 三轴加速度 | m/s2 | — |
| 横摆角速度 | deg/s | — |
5.2.4左转辅助
5.2.4.1应用定义和预期效果
左转辅助(LTA:Left Turn Assist)是指,主车(HV)在交叉路口左转,与对向驶来的远车(RV)存在碰撞危险时,LTA应用将对HV驾驶员进行预警。本应用适用于城市及郊区普通道路及公路的交叉路口。
LTA应用辅助驾驶员避免或减轻侧向碰撞,提高交叉路口通行安全。
5.2.4.2主要场景

LTA的主要场景为,HV在交叉路口左转,RV从对面驶向路口(图11)。具体描述如下:
一一HV和RV同时从相对的方向驶向交叉路口;
一一HV和RV需具备短程无线通信能力;
——HV启动并准备进入路口左转时,若系统检测到与对向来车RV存在碰撞危险,LTA应用对HV驾驶员发出预警;
——预警时机需确保HV驾驶员收到预警后,能有足够时间采取措施,避免与RV发生碰撞。
5.2.4.3系统基本原理
HV驶向交叉路口左转行驶时,若与对向行驶车辆RV存在碰撞危险,LTA应用对HV驾驶员进行预警。
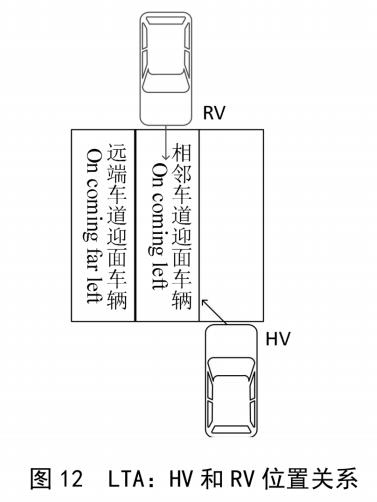
触发LTA功能的HV和RV位置关系如图12.
LTA基本工作原理如下:
——分析接收到的RV消息,筛选出位于HV相邻车道迎面车辆(oncoming left)和远端车道迎面车辆(oncoming far left)区域的RV;
一一进一步筛选处于一定距离范围内的V作为潜在威胁车辆:
一一计算每一个潜在威胁车辆到达路口的时间(TTI:time-to-intersection)和到达路口的距离(DTI:distance–to-intersection),筛选出与HV存在碰撞危险的威胁车辆;
——若有多个威胁车辆,则筛选出最紧急的威肋胁车辆;
——系统通过HMI对HV驾驶员进行相应的碰撞预警。
5.2.4.4通信方式
HV和RV需具备短程无线通信能力,车辆信息通过短程无线通信在HV和RV之间传递(V2V);利用具备短程无线通信能力的路侧设备直接探测碰撞危险或远车信息,发送给主车(V2I)。
5.2.4.5基本性能要求
LTA基本性能要求如下:
——主车车速范围(070)km/h;
——通信距离≥150m;
——数据更新频率典型值10Hz;
——系统延迟≤100ms;
——定位精度≤1.5m。
5.2.4.6 数据交互需求
LTA数据交互需求如表4。
表4 LTA数据交互需求(远车数据)
| 数据 | 单位 | 备注 |
|---|---|---|
| 时刻 | ms | — |
| 位置(经纬度) | deg | — |
| 位置(海拔) | m | — |
| 车头方向角 | deg | — |
| 车体尺寸(长、宽) | m | — |
| 速度 | m/s | — |
| 三轴加速度 | m/s2 | — |
| 横摆角速度 | deg/s | — |
| 转向信号 | — | 左转向灯是否激活 |
5.2.5盲区预警/变道预警
5.2.5.1应用定义和预期效果
盲区预警/变道预警(BSw/LCW:Blind Spot Warning/Lane Change Warning)是指,当主车(HV)的相邻车道上有同向行驶的远车(RV)出现在HV盲区时,BSW应用对HV驾驶员进行提醒;当主车(HV)准备实施变道操作时(例如激活转向灯等),若此时相邻车道上有同向行驶的远车(RV)处于或即将进入HV盲区,LCW应用对HV驾驶员进行预警。本应用适用于普通道路或高速公路等车辆变道可能存在碰撞危险的预警。
BSW/LCW应用避免车辆变道时,与相邻车道上的车辆发生侧向碰撞,提高变道安全。
5.2.5.2 主要场景
BSW/LCW包括如下主要场景:
a)RV在HV盲区内(图13):
1)HV在本车道内行驶,RV在HV相邻车道内同向行驶,且RV处于HV盲区内:
2)BSW应用提醒HV驾驶员其盲区内存在车辆RV;
3)若此时检测到HV驾驶员有向RV所在车道变道的意图(例如激活转向灯或者根据方向盘转角综合判断),则LCW应用对HV驾驶员发出预警;
4)预警时机需确保HV驾驶员收到预警后,能有足够时间采取措施,避免与相邻车道上的RV发生碰撞。

b)RV即将进入HV盲区(图14):
1)HV在本车道内行驶,远车RV在相邻车道上与HV同向行驶,且即将进入HV的盲区:
2)BSW应用提醒HV驾驶员即将有车辆进入其盲区;
3)若此时检测到HV驾驶员有向RV所在车道变道的意图(例如激活转向灯),则LCW应用对HV驾驶员发出预警;
4)预警时机需确保HV驾驶员收到预警后,能有足够时间采取措施,避免与相邻车道上的RV发生碰撞。
5.2.5.3系统基本原理
当HV意图换道时,若检测到相邻车道上与HV同向行驶的车辆RV处于或即将进入HV盲区,BSW/LCW应用对HV驾驶员进行预警。触发BSW/LCW功能的HV和RV位置关系如图15。BSW/LCW应用适用于直道和弯道情形。

BSW/LCW基本工作原理如下:
——从接收到的RV消息中,筛选出位于HV左后相邻车道和右后相邻车道的RV作为潜在威胁车辆:
——判断潜在威胁车辆是否处于或即将进入HV盲区:
——如果潜在威胁车辆处于或即将进入HV盲区,首先对HV驾驶员进行BSW提醒;
——如果潜在威肋车辆处于或即将进入HV盲区,而Ⅳ此时有变道操作,则对HV驾驶员进行LCW报警:
——系统通过HMI对HV驾驶员进行提醒或报警。
5.2.5.4通信方式
HV和RV需具备短程无线通信能力,车辆信息通过短程无线通信在HV和RV之间传递(V2V)。
5.2.5.5基本性能要求
BSW/LCW基本性能要求如下:
——主车车速范围(0~130)km/h;
——通信距离≥150m;
——数据更新频率典型值10Hz;
——系统延迟≤100ms:
——定位精度≤1.5m。
5.2.5.6数据交互需求
BSW/LCW数据交互需求如表5。
表5 BSW/LCW:数据交互需求(远车数据)
| 数据 | 单位 | 备注 |
|---|---|---|
| 时刻 | ms | — |
| 位置(经纬度) | deg | — |
| 位置(海拔) | m | — |
| 车头方向角 | deg | — |
| 车体尺寸(长、宽) | m | — |
| 速度 | m/s | — |
| 三轴加速度 | m/s2 | — |
| 横摆角速度 | deg/s | — |
| 转向信号 | — | 转向灯是否激活 |
| 方向盘转角 | deg | — |
5.2.6逆向超车预警
5.2.6.1应用定义和预期效果
逆向超车预警(DNPW:Do Not Pass Warning)是指,主车(HV)行驶在道路上,因为借用逆向车道超车,与逆向车道上的逆向行驶远车(RV)存在碰撞危险时,DNPW应用对HV驾驶员进行预警。本应用适用于城市及郊区普通道路及公路超车变道碰撞危险的预警。
DPW应用辅助驾驶员避免或减轻超车过程中产生的碰撞,提高逆向超车通行安全。
5.2.6.2主要场景
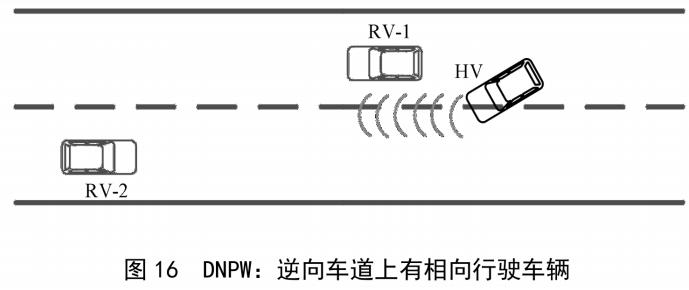
DNPW的主要场景为,HV逆向变道超车(图16)。具体描述如下:
——HV跟随RV-1行驶,HV准备超车,RV-2从相邻逆向车道上逆向行驶而来,HV的视线可能被RV-1遮挡;
——HV和RV-1、RV-2需具备短程无线通信能力;
——当HV打开变道转向灯并准备进入逆行车道时,DNPW应用对HV驾驶员发出预警,提醒驾驶员与逆向来车RV-2存在碰撞危险;
——预警时机需确保V驾驶员收到预警后,能有足够时间采取措施,避免与RV-2发生碰撞。
5.2.6.3系统基本原理
HV正常行驶过程中,打开转向灯准备变道时,若与相邻逆向车道上的远车RV-2存在碰撞危险,DNPW应用对HV驾驶员进行预警。触发DNPW功能的HV和远车RV-1、RV-2位置关系如图17。

DNPW基本工作原理如下:
——分析接收到的RV消息,筛选出位于HV左前方相邻逆向车道逆向行驶的RV:
——进一步筛选处于一定距离范围内的RV作为潜在威车辆:
——计算每一个潜在威胁车辆到达碰撞点的时间(TTC:time-to-col1 ision)和碰撞距离(DTC:distance-to-collision),筛选出与HV存在碰撞危险的威胁车辆;
——若有多个威肋车辆,则筛选出最紧急的威胁车辆;
——若发现HV主动进行变道超车动作,与逆向车道上的车辆碰撞条件成立,系统则通过MI对V驾驶员进行相应的碰撞预警。
5.2.6.4通信方式
HV和RV需具备短程无线通信能力,车辆信息通过短程无线通信在HV和RV之间传递(V2V)。
5.2.6.5基本性能要求
DNPW基本性能要求如下:
一一主车车速范围(0~70)km/h;
——通信距离≥300m;
——数据更新频率典型值10Hz;
——系统延迟≤100ms;
——定位精度≤1.5m。
5.2.6.6数据交互需求
DNPW数据交互需求如表6。
表6 DNPW数据交互需求(远车数据)
| 数据 | 单位 | 备注 |
|---|---|---|
| 时刻 | ms | — |
| 位置(经纬度) | deg | — |
| 位置(海拔) | m | — |
| 车头方向角 | deg | — |
| 车体尺寸(长、宽) | m | — |
| 速度 | m/s | — |
| 三轴加速度 | m/s2 | — |
| 横摆角速度 | deg/s | — |
5.2.7紧急制动预警
5.2.7.1应用定义和预期效果
紧急制动预警(EBW:Emergency Brake Warning)是指,主车(HV)行驶在道路上,与前方行驶的远车(RV)存在一定距离,当前方RV进行紧急制动时,会将这一信息通过短程无线通信广播出来。HV检测到RV的紧急制动状态,若判断该RV事件与HV相关,则对HV驾驶员进行预警。本应用适用于城市郊区普通道路及高速公路可能发生制动追尾碰撞危险的预警。
EBW应用辅助驾驶员避免或减轻车辆追尾碰撞,提高道路行驶通行安全。
5.2.7.2主要场景
EBW包括如下主要场景:
a)同车道(或相邻车道)HV前方紧邻RV发生紧急制动(图18):
1)HV行驶在道路上,RV发生紧急制动事件;
2)HV和RV需具备短程无线通信能力;
3)EBW应用对HV驾驶员发出预警,提醒驾驶员前方紧急制动操作存在碰撞危险;
4)预警时机需确保HV驾驶员收到预警后,能有足够时间采取措施,避免与RV发生追尾碰撞。

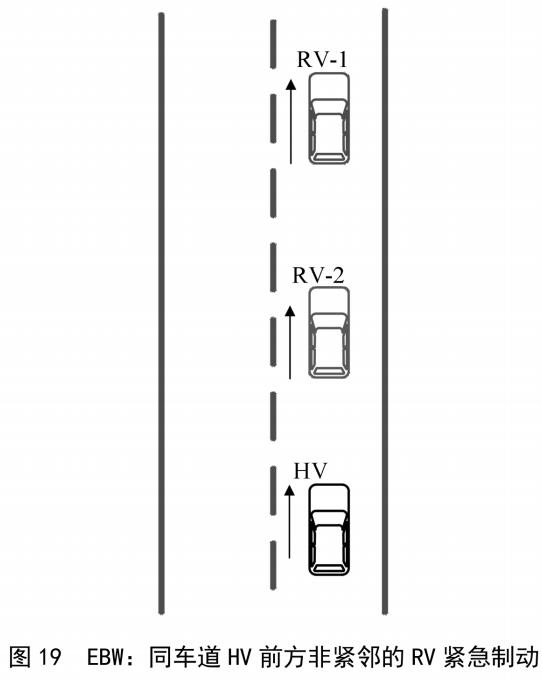
b)同车道(或相邻车道)HV前方非紧邻RV发生紧急制动(图19):
1)HV行驶在道路上,其前方非紧邻的RV-1发生紧急制动事件,HV的视线被紧邻的RV-2所遮挡;
2)HV和RV-1、RV-2需具备短程无线通信能力;
3)EBW应用对HV驾驶员发出预警,提醒驾驶员前方紧急制动操作存在碰撞危险;
4)预警时机需确保HV驾驶员收到预警后,能有足够时间采取措施,避免与RV-2和RV-1发生追尾碰撞。
5.2.7.3系统基本原理
相同或者相邻车道上,RV出现紧急制动事件并对外广播,当EBW通过行驶方向、距离、位置、速度等信息,判断该事件对HV具有潜在危险时,则对HV驾驶员进行预警。触发EBW功能的HV和RV位置关系如图20。
EBW基本工作原理如下:
一一RV出现紧急制动事件时,将这一信息对外进行广播:
一一HV接收到的RV信息时,判断其是否包含紧急制动事件;
一一V将出现紧急制动事件的RV分类为前方相同车道和前方相邻车道;
——HV进一步根据车速、位置等信息判断该RV是否与HV相关,若存在潜在碰撞危险则对HV驾驶员进行提醒。
5.2.7.4通信方式
HV和RV需具备短程无线通信能力,车辆信息通过短程无线通信在HV和RV之间传递(V2V)。
5.2.7.5基本性能要求
EBW基本性能要求如下:
——主车车速范围(0130)km/h;
——通信距离≥150m:
一一数据更新频率典型值10Hz;
一一系统延迟≤100ms:
——定位精度≤1.5m。
5.2.7.6数据交互需求
EBW数据交互需求如表7。
表7 EBW数据交互需求(远车数据)
| 数据 | 单位 | 备注 |
|---|---|---|
| 时刻 | ms | — |
| 位置(经纬度) | deg | — |
| 位置(海拔) | m | — |
| 车头方向角 | deg | — |
| 车体尺寸(长、宽) | m | — |
| 速度 | m/s | — |
| 纵向加速度 | m/s2 | — |
| 紧急制动状态 | — | 是否激活 |
5.2.8异常车辆提醒
5.2.8.1应用定义和预期效果
异常车辆提醒(AVW:Abnormal Vehicle Warning.)是指,当远车(RV)在行驶中打开故障报警灯时,对外广播消息中显示当前“故障报警灯开启”,主车(HV)根据收到的消息内容,识别出其属于异常车辆;或者HV根据RV广播的消息,判断RV车速为静止或慢速(显著低于周围其他车辆),识别出其属于异常车辆。当识别出的异常车辆可能影响本车行驶路线时,AVW应用提醒V驾驶员注意。本应用适用于城市及郊区普通道路及公路的交叉路口、环道的入口、高速路入口等环境中的异常车辆提醒。
AVW应用辅助驾驶员及时发现前方异常车辆,从而避免或减轻碰撞,提高通行安全。
5.2.8.2主要场景
AVW包括如下主要场景:
a)异常车辆开启故障报警灯(图21):
1)HV在道路上正常行驶,RV在HV前方相同或相邻车道内;
2)HV和RV需具备短程无线通信能力;
3)RV开启故障报警灯,并在对外广播的消息中携带“故障报警灯开启”信息,AVW应用对HV驾驶员发出预警,提醒驾驶员前方有异常车辆:
4)预警时机需确保HV驾驶员收到预警后,能由足够时间采取措施,避免与RV发生碰撞。

b)异常车辆未开启故障报警灯(图22):
1)HV在道路上正常行驶,RV在HV前方相同或相邻车道内;
2)HV和RV需具备短程无线通信能力;
3)RV为静止或者慢速车辆,在对外广播的消息中携带自身位置、速度、航向角等信息,HV根据这些信息判断RV为静止车辆或慢速车辆(车速显著低于周围其他车辆)。AVW应用对HV驾驶员发出预警,提醒驾驶员前方有异常车辆行驶;
4)预警时机需确保HV驾驶员收到预警后,能有足够时间采取措施,避免与RV发生碰撞。

5.2.8.3系统基本原理
HV在道路上行驶,若收到前方RV发出的“故障报警灯开启”信息,或者分析RV发送消息中的速度、位置、航向角等信息,并结合其他RV车辆的车速信息,识别该RV车辆处于静止/慢速行驶的异常状态,若判断其与HV存在碰撞危险,则及时报警;若有多个威胁车辆,则筛选出最紧急的威胁车辆。触发AVW功能的HV和RV位置关系如图23。

5.2.8.4通信方式
HV和RV需具备短程无线通信能力,车辆信息通过短程无线通信在HV和RV之间传递(V2V)。
5.2.8.5基本性能要求
AVW基本性能要求如下:
一一主车车速范围(0~130)km/h:
——通信距离≥150m;
——数据更新频率典型值10Hz;
——系统延迟≤100ms;
一一定位精度≤1.5m。
5.2.8.6 数据交互需求
AVW数据交互需求如表8。
表8 AVW数据交互需求(远车数据)
| 数据 | 单位 | 备注 |
|---|---|---|
| 时刻 | ms | — |
| 位置(经纬度) | deg | — |
| 位置(海拔) | m | — |
| 车头方向角 | deg | — |
| 速度 | m/s | — |
| 异常状态信息 | — | 远车"故障报警灯开启"信息、车辆静止或慢速行驶判断等 |
5.2.9车辆失控预警
5.2.9.1应用定义和预期效果
车辆失控预警(CLW:Control Loss Warning)是指,当远车(RV)出现制动防抱死系统(ABS)、车身稳定性系统(ESP)、牵引力控制系统(TCS)、车道偏移预警系统(LDW)功能触发时,RV对外广播此类状态信息,若主车(HV)根据收到的消息识别出该车属于车辆失控,且可能影响自身行驶路线时,则CLW应用对HV驾驶员进行提醒。本应用适用于城市、郊区普通道路及高速公路可能发生车辆失控碰撞危险的预警。
CLW基于通信的终端,可以将车辆内部电控系统的功能触发/失控等信息,及时对外广播,便于周边车辆迅速采取避让等处置措施,避免由于某一车辆失控导致与周边车辆碰撞事故发生。
5.2.9.2主要场景描述
CLW包括如下主要场景:
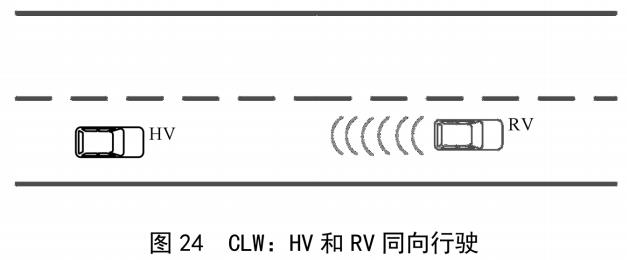
a)HV和RV同向行驶(图24)
1)HV和RV均具备短程无线通信能力;
2)HV和RV同向行驶,HV在RV的后方:
3)RV制动防抱死系统(ABS)、车身稳定性系统(ESP)、牵引力控制系统(TCS)、车道偏移预警系统(LDW)功能触发;
4)RV广播车辆失控状态信息,HV接收信息,CLW应用对HV驾驶员发出预警,提醒驾驶员注意;
5)预警时机需确保HV驾驶员收到预警后,能有足够时间采取措施,避免与RV发生碰撞。
b)HV和RV相向行驶(图25):
1)HV和RV均具备短程无线通信能力;
2)HV和RV相向行驶,距离逐渐接近:
3)RV制动防抱死系统(ABS)、车身稳定性系统(ESP)、牵引力控制系统(TCS)、车道偏移预警系统(LDW)功能触发;
4)RV广播车辆失控状态信息,HV接收信息,CLW应用对HV驾驶员发出预警,提醒驾驶员注意;
5)预警时机需确保V驾驶员收到预警后,能有足够时间采取措施,避免与RV发生碰撞。
5.2.9.3系统基本原理
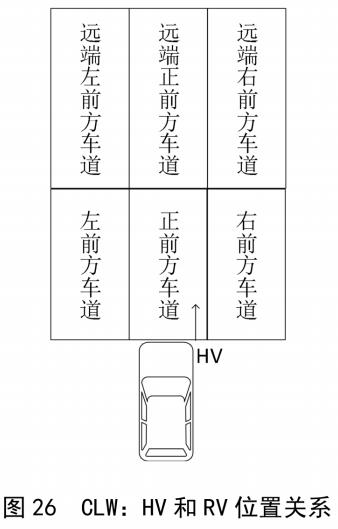
HV和RV同向行驶(不限于在同一车道内),若RV出现车辆失控预警且与后方HV存在碰撞危险时,CLW应用对HV驾驶员进行预警。HV和RV在相邻车道相向行驶,若RV在与HV会车前出现车辆失控,且与相向行驶的HV存在碰撞危险时,CLW应用对HV驾驶员进行预警。触发CLW功能的HV和RV的位置关系如图26(RV可位于HV前方车道的六个区域内)。
CLW基本工作原理如下:
——HV分析接收到的RV消息;
——计算出HV与RV的相对距离和发生碰撞的时间:
——系统通过MI对HV驾驶员进行相应的碰撞预警。
5.2.9.4通信方式
HV和RV需具备短程无线通信能力,车辆信息通过短程无线通信在HV和RV之间传递(V2V)。
5.2.9.5基本性能要求
CLW基本性能要求如下:
一一主车车速范围(0~130)km/h;
一一通信距离≥300m;
——数据更新频率典型值10Hz;
一一系统延迟≤100ms;
——定位精度≤1.5m。
5.2.9.6数据交互需求
CLW数据交互需求如表9。
表9 CLW数据交互需求(远车数据)
| 数据 | 单位 | 备注 |
|---|---|---|
| 时刻 | ms | — |
| 位置(经纬度) | deg | — |
| 位置(海拔) | m | — |
| 速度 | m/s | — |
| 加速度 | m/s2 | — |
| ABS状态 | — | Valid/invalid |
| ESP状态 | — | Valid/invalid |
| TCS状态 | — | Valid/invalid |
| LDW状态(左右) | — | Valid/invalid |
| 其他失控状态 | — | — |
| 车头方向角 | deg | — |
| 车体尺寸(长、宽) | m | — |
5.2.10道路危险状况提示
5.2.10.1应用定义和预期效果
道路危险状况提示(HLW:Hazardous Location Warning)是指,主车(HV)行驶到潜在危险状况(如桥下存在较深积水、路面有深坑、道路湿滑、前方急转弯等)路段,存在发生事故风险时,HLW应用对V驾驶员进行预警。本应用适用于城市道路、郊区道路和高速公路等容易发生危险状况的路段或者临时性存在道路危险状况的路段。
HLW应用将道路危险状况及时通知周围车辆,便于驾驶员提前进行处置,提高车辆对危险路况的感知能力,降低驶入该危险区域的车辆发生事故的风险。
5.2.10.2主要场景
当道路存在危险状况时,附近路侧单元(SU)或临时路侧设备对外广播道路危险状况提示信息,包括:位置、危险类型、危险描述等,行经该路段的V根据信息及时采取避让措施,避免发生事故(图27)。

5.2.10.3系统基本原理
HLW基本工作原理如下:
一一具备短程无线通信能力的路侧单元(RSU)周期性对外广播道路危险状况提示信息:
一一HV依据自身位置信息和道路危险状况提示信息,计算与道路危险区域的距离;
一一HV依据当前速度计算到达道路危险区域的时间:
一一系统通过MI对驾驶员进行及时的预警。
5.2.10.4通信方式
HV和RSU需具备短程无线通信能力,RSU将道路危险状况信息发送给HV(V2I)。
5.2.10.5基本性能要求
HLW基本性能要求如下:
一一主车车速范围(0130)km/h:
——通信距离≥300m;
一一数据更新频率典型值5Hz;
——系统延迟≤100ms;
——定位精度≤1.5m。
5.2.10.6数据交互需求
HLW数据交互需求如表10。
表10 HLW数据交互需求(路侧数据)
| 数据 | 单位 | 备注 |
|---|---|---|
| 时刻 | ms | — |
| 道路危险位置(经纬度) | deg | — |
| 道路危险位置(海拔) | m | — |
| 道路危险状况类型 | — | INTEGER |
| 道路危险状态描述 | — | STRING |
5.2.11 限速预警
5.2.11.1应用定义和预期效果
限速预警(SLW:Speed Limit Warning)是指,主车(HV)行驶过程中,在超出限定速度的情况下,SLW应用对HV驾驶员进行预警,提醒驾驶员减速行驶。本应用适用于普通道路及高速公路等有限速的道路。
SLW应用辅助驾驶员避免超速行驶,消除安全隐患,减少事故的发生。
5.2.11.2主要场景
HV和路侧单元(RSU)需具备短程无线通信能力。HV行驶时,RSU周期性发送特定路段的限速信息。
当HV判断自己在RSU指示的特定路段,且车速超过RSU的速度限制时,SLW应用对HV驾驶员发出预警,提醒驾驶员减速行驶。
5.2.11.3系统基本原理
SLW基本工作原理如下:
——HV分析接收到的RSU消息。提取限速路段信息和具体限速大小:
——根据车辆本身的定位和行驶方向,将自身定位到特定路段上:
——如果HV检测到自己处在限速路段区域内,则判断自身是否在限速范围内:
——如果不满足限速,则触发SLW报警。系统通过HMI对HV驾驶员进行相应的限速预警,提醒驾驶员减速。
5.2.11.4通信方式
HV和路侧单元(RSU)需具备短程无线通信能力,信息通过短程无线通信在路侧单元和HV之间传递(V2I)。
5.2.11.5基本性能要求
SLW基本性能要求如下:
一一主车车速范围(0~130)km/h:
——通信距离≥300m;
——数据更新频率典型值1Hz;
一一系统延迟≤100ms:
——定位精度≤1.5m
5.2.11.6数据交互需求
SLW数据交互需求如表11。
| 数据 | 单位 | 备注 |
|---|---|---|
| 时刻 | ms | — |
| RSU经纬度 | deg | — |
| RSU海拔 | m | — |
| 限速区域范围 | — | — |
| 速度限制 | m/s | — |
5.2.12 闯红灯预警
5.2.12.1应用定义和预期效果
闯红灯预警(RLVW:Red Light Violation Warning)是指,主车(HV)经过有信号控制的交叉口(车道),车辆存在不按信号灯规定或指示行驶的风险时,RLW应用对驾驶员进行预警。本应用适用于城市及郊区道路及公路的交叉路口、环道的出入口和可控车道、高速路入口和隧道等有信号控制的车道。
闯红灯过程见图28。
RLVW应用辅助驾驶员安全通过信号灯路口,提高信号灯路口的通行安全。

5.2.12.2主要场景
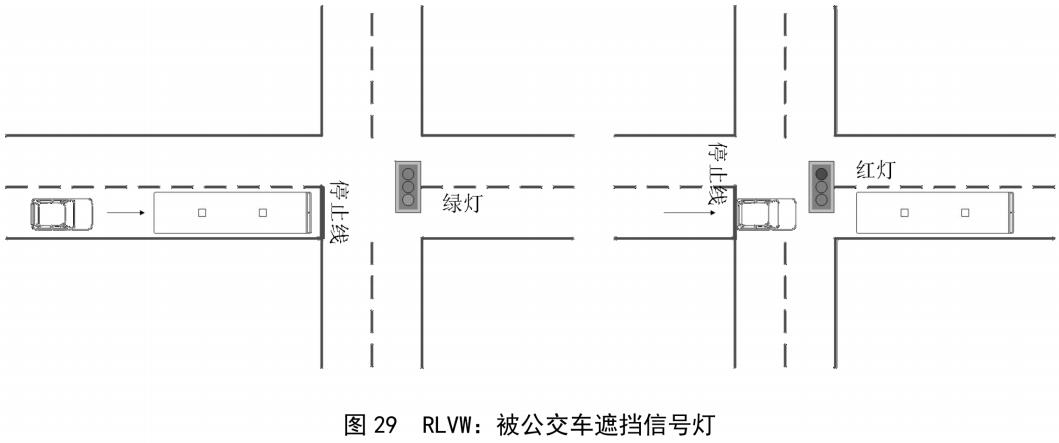
当前方有大车遮挡视线(图29)或恶劣天气影响视线,或由于其他原因,使HV无法对当前红灯或即刻到来的红灯做出正确判断时,RLW检测HV当前所处位置和速度等,通过计算预测车头经过路口停止线时信号灯的状态,并向驾驶员进行预警。
5.2.12.3系统基本原理
当V驶向具有信号控制的交叉路口(车道),遇信号灯即将变红或正处在红灯状态,但车辆未能停止在停止线内而继续前行时,RLVW应用将对该车驾驶员进行预警。触发RLVW功能的HV与路口设置位置关系如图30。

RLVW基本工作原理如下:
一一具有短程、远程通信能力的路侧单元(RSU)定时发送路口地理信息和信号灯实时状态信息:
一一HV依据本身GSS地理信息,确定当前受管控信号的相位,并计算其与停止线的距离;
一一HV依据当前速度和其他交通参数预估到达路口的时间;
一一LVW将这些信息与接收到的红灯切换时刻及红灯保留时长信息进行对比分析,决定是否预警。
5.2.12.4通信方式
具备短程、远程无线通信能力的路侧设备,将有关交叉口(车道)信息广播给具有短程通信能力的车辆(V2I)。
5.2.12.5基本性能要求
RLVW基本性能要求如下:
——主车车速范围(0~70)km/h;
——通信距离≥150m;
——数据更新频率典型值5Hz;
——系统延迟≤100ms;
——定位精度≤1.5m。
5.2.12.6数据交互需求
RLVW数据交互需求如表12。
表12 RLVW数据交互需求(路侧数据)
| 数据 | 单位 | 备注 |
|---|---|---|
| 时刻 | ms | — |
| 路口ID | — | — |
| 入口ID | — | — |
| 车道宽度 | m | — |
| 车道中心线位置 | — | — |
| 停车线位置 | — | — |
| 车道属性 | — | 左、直、右和掉头 |
| 车道所属相位 | — | — |
| 当前灯态 | — | 针对该车道每一个车道属性(允许行驶方向)的信号灯状态 |
| 红灯变绿剩余时间/绿灯变红剩余时间 | s | 可预测一个周期或两个周期 |
| 红绿灯配时是否自适应控制 | — | 自适应控制时,绿灯剩余时间会改变(周期内或下一个周期) |
5.2.13弱势交通参与者碰撞预警
5.2.13.1应用定义和预期效果
弱势交通参与者碰撞预警(VRUCW:Vulnerable Road User Collision Warning)是指,HV在行驶中,与周边行人(P,Pedestrian.。含义拓展为广义上的弱势交通参与者,包括行人、自行车、电动自行车等,以下描述以行人为例)存在碰撞危险时,VUCW应用将对车辆驾驶员进行预警,也可对行人进行预警。本应用适用于城市及郊区普通道路及公路的碰撞危险预警。
VRUCW)应用辅助驾驶员避免或减轻与侧向行人§碰撞危险,提高车辆及行人通行安全。
5.2.13.2主要场景
VRUCW包括如下主要场景:
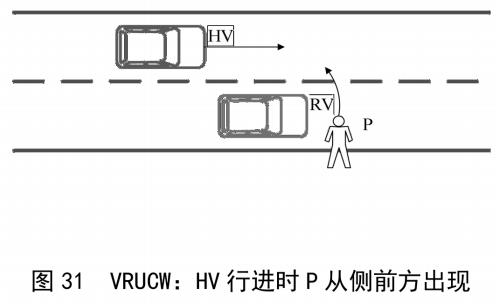
a)HV行进时行人§从侧前方出现(图31):
1)HV在行进时,P从侧前方出现,HV的视线可能被出现在路边的RV所遮挡:
2)HV和P需具备短程无线通信能力,RV是否具备短程无线通信能力不影响应用场景的有效性;
3)HV接近P时,如果检测到可能发生碰撞的危险,VUCW应用对HV驾驶员发出预警,同时也可对P发出预警,提醒驾驶员与侧向P存在碰撞危险:
4)预警时机需确保HⅣ驾驶员收到预警后,能有足够时间采取措施,避免与P发生碰撞。
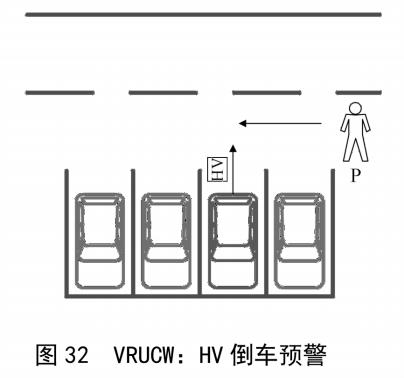
b)HV倒车预警(图32):
1)HV在倒车时,P从HV侧后方出现,HV的视线可能被两侧车辆遮挡,也可能由于是盲区等原因,使得HV的驾驶员不能及时发现:
2)HV和P需具备短程无线通信能力,周边RV是否具备该能力不影响预警效果;
3)HV接近P时,如果检测到可能存在碰撞的危险,VRUCW应用对HV驾驶员发出预警,也可以同时对P发出预警,提醒驾驶员这一危险:
4)预警时机需确保HⅣ驾驶员收到预警后,能有足够时间采取措施,避免与P发生碰撞。
c)通过路侧设备(I)检测行人并对车辆预警:
在场景)、b)的基础上,如果P不具备通信能力,路侧设备(I)可通过摄像头、微波雷达等传感器检测周边行人§,并广播行人§的相关信息,VRUCW)应用对可能发生碰撞的车辆驾驶员发出预警。
5.2.13.3 基本工作原理
VRUCW基本工作原理如下:
——HV分析接收到的行人§消息,筛选出与车辆行驶方向上可能发生冲突的行人;
——进一步筛选处于一定距离或者时间范围内的行人作为潜在威胁行人:
——计算与每一个(或者成组)行人的碰撞时间TTC(time-to-collision),筛选出存在碰撞威胁的行人:
——若存在多个威胁行人(或行人组),则筛选出最紧急的威胁行人(或行人组);
——系统对HV驾驶员进行相应的碰撞预警。
5.2.13.4通信方式
HV和P需具备短程无线通信能力,车辆信息通过短程无线通信在HV和P之间传递(V2P);或利用路侧感知系统对行人信息进行感知,通过路侧设备发给车辆(V2I)。
5.2.13.5 基本性能要求
VRUCW:基本性能要求如下:
一一主车车速范围(0~70)km/h;
——通信距离≥150m:
——信号更新频率典型值5Hz;
——系统延迟≤100ms;
一一定位精度≤1.5m。
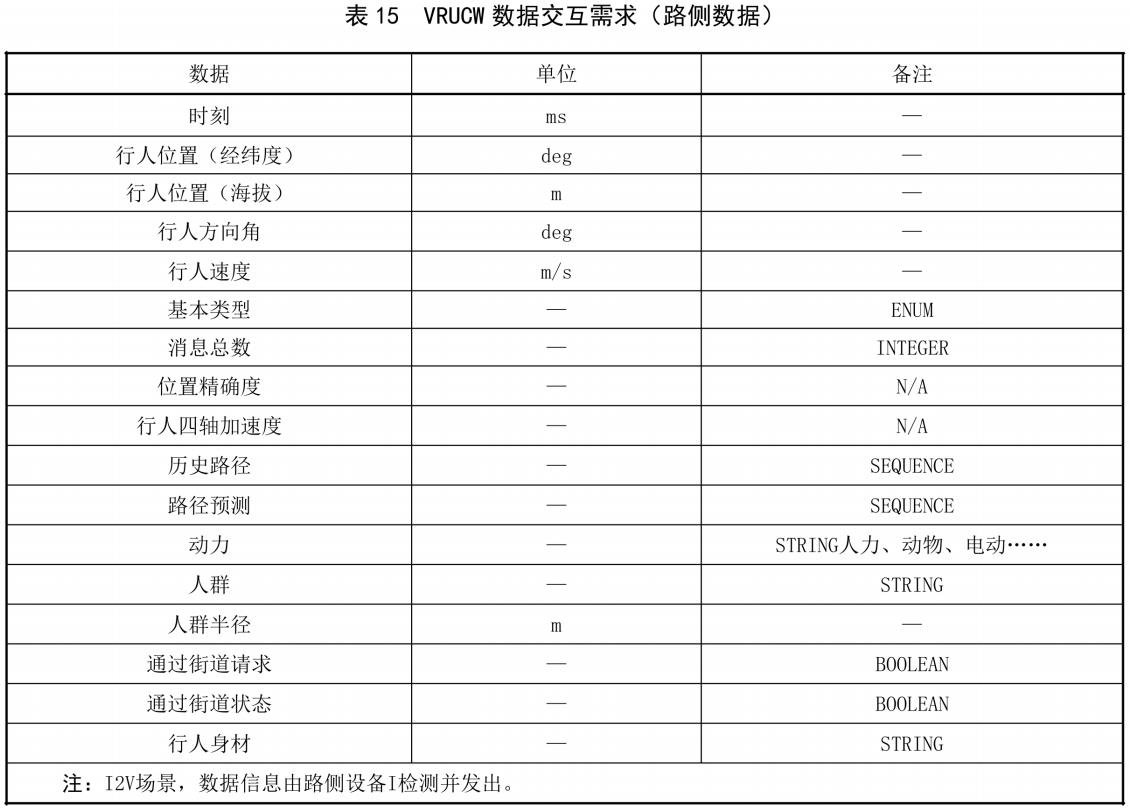
5.2.13.6数据交互需求
VRUCW数据交互需求如表13、表14、表15。



5.2.14绿波车速引导
5.2.14.1应用定义和预期效果
绿波车速引导(GLOSA:Green Light Optimal Speed Advisory)是指,当装载车载单元(OBU)的HV驶向信号灯控制交叉路口,收到由路侧单元(RSU)发送的道路数据及信号灯实时状态数据时,GLOSA应用将给予驾驶员一个建议车速区间,以使车辆能够经济地、舒适地(不需要停车等待)通过信号路口。
本应用适用于城市及郊区普通道路信号灯控制路口。
GLOSA应用能辅助驾驶应用,提高车辆通过交叉路口的经济性和舒适性,提升交通系统效率。
5.2.14.2主要场景
GL0SA主要场景见图33。具体描述如下:
——HV从远处接近信号灯控制路口;
——路侧通信设备发出局部道路数据信息及从路口信号机处获得的信号灯数据信息和实时状态信息;
——GL0SA应用根据上述信息,给出HV前方信号灯的实时状态,并结合HV的定位和行驶状态信息,计算出通过路口的引导车速区间。

5.2.14.3基本工作原理
GL0SA基本工作原理如下:
一一HV根据收到的道路数据,以及本车的定位和运行数据,判定本车在路网中所处的位置和运行方向;
——判断车辆前方路口是否有信号灯,提取信号灯对应相位的实时状态:若有信号灯信息,则可直接显示给驾驶员:
——GL0SA应用根据本车的位置,以及信号灯对应相位的实时状态,计算本车能够在本次或下次绿灯期间不停车通过路口所需的最高行驶速度和最低行驶速度,并进行提示。
5.2.14.4通信方式
具备短程无线通信能力的路侧设备,将道路数据与信号灯实时状态数据,发送给HⅣ(V2I)。
5.2.14.5基本性能要求
GL0SA为效率类V2X应用,适用于市区或郊区有信号控制路口的路网,该应用对定位精度和数据的实时性要求相较安全类应用为低。
GLOSA基本性能要求如下:
——车辆速度范围(0~70)km/h;
一一通信距离≥150m;
一一道路数据集更新频率典型值1Hz;
一一信号灯数据集更新频率典型值5Hz;
——系统延迟≤200ms;
——定位精度≤1.5m。
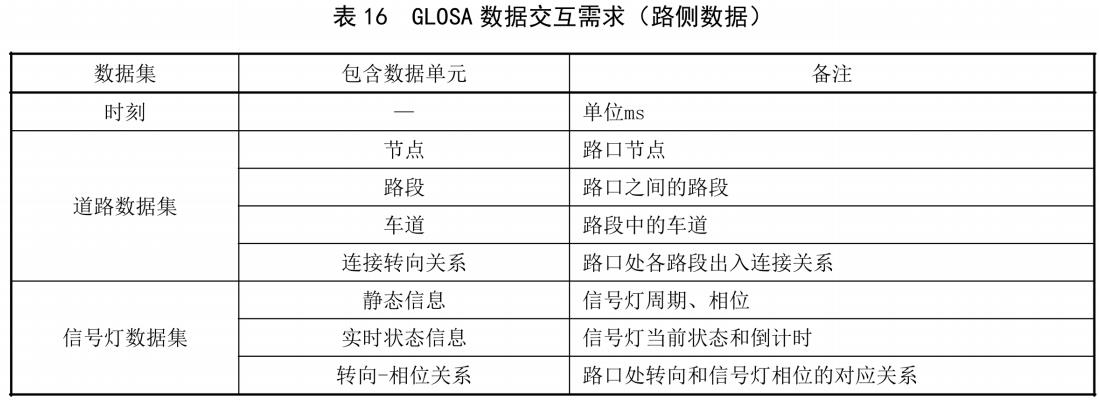
5.2.14.6数据交互需求
GL0SA数据交互需求如表16。
5.2.15车内标牌
5.2.15.1应用定义和预期效果
车内标牌(IVS:In-Vehicle Signage)是指,当装载车载单元(OBU)的HV收到由路侧单元(RSU)发送的道路数据以及交通标牌信息,IVS应用将给予驾驶员相应的交通标牌提示,保证车辆的安全
以上是关于合作式智能运输系统-车用通信系统应用层及应用数据交互标准 第一阶段2020的主要内容,如果未能解决你的问题,请参考以下文章