合作式智能运输系统 车用通信系统 应用层及应用数据交互标准
Posted 爱是与世界平行
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了合作式智能运输系统 车用通信系统 应用层及应用数据交互标准相关的知识,希望对你有一定的参考价值。
整理中国汽车工程学会标准,《合作式智能运输系统 车用通信系统 应用层及应用数据交互标准》 T/CASE 53-2017
主要是为了整理一阶段的场景,为了研究各个场景的定义及要求实现等。
PDF固然好,格式不乱,但是,嗯,还是喜欢自己整理为Markdown,随时学习随时修改。
本标准规定了合作式智能运输系统车用通信系统应用层的术语和定义,以及数据集和数据交互标准及接口规范等内容。
本标准适用于基于各种通信方式的车用通信系统应用场景开发、验证及商用。
1 前向碰撞预警
1.1 应用定义和预期效果
前向碰撞预警(FCW: Forward Collision Warning)是指,主车(HV)在车道上行驶,与在正前方同一车道的远车(RV)存在追尾碰撞危险时,FCW 应用将对 HV 驾驶员进行预警。本应用适用于普通道路或高速公路等车辆追尾碰撞危险的预警。
FCW 应用辅助驾驶员避免或减轻前向碰撞,提高道路行驶安全。
1.2 主要场景
FCW 包括如下主要场景:
a)HV 行驶,RV 在 HV 同一车道正前方停止(图 3):
1)HV 正常行驶,RV 在位于 HV 同一车道的正前方停止;
2)HV 和 RV 需具备短程无线通信能力;
3)HV 行驶过程中在即将与 RV 发生碰撞时,FCW 应用对 HV 驾驶员发出预警,提醒驾驶员与位于正前方的车辆 RV 存在碰撞危险;
4)预警时机需确保 HV 驾驶员收到预警后,能有足够时间采取措施,避免与 RV 发生追尾碰撞。

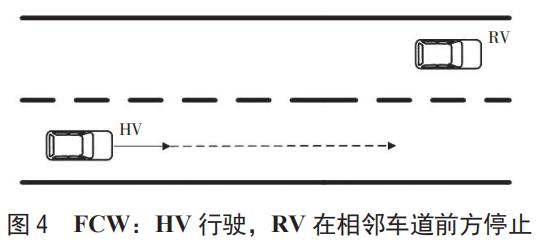
b)HV 行驶,RV 在 HV 相邻车道前方停止(图 4):
1)HV 正常行驶,RV 在位于 HV 相邻车道的前方停止;
2)HV 和 RV 需具备短程无线通信能力;
3)HV 行驶过程中不会与 RV 发生碰撞,HV 驾驶员不会收到 FCW 预警信息。
c)HV 行驶,RV 在 HV 同一车道正前方慢速或减速行驶(图 5):
1)HV 正常行驶,RV 位于 HV 同一车道的正前方慢速或减速行驶;
2)HV 和 RV 需具备短程无线通信能力;
3)HV 行驶过程中在即将与 RV 发生碰撞时,FCW 应用对 HV 驾驶员发出预警,提醒驾驶员与位于正前方的车辆 RV 存在碰撞危险;
4)预警时机需确保 HV 驾驶员收到预警后,能有足够时间采取措施,避免与 RV 发生追尾碰撞。

d)HV 行驶,HV 视线受阻,RV-1 在 HV 同一车道正前方停止(图 6):
1)HV 跟随 RV-2 正常行驶,RV-1 在同一车道上 RV-2 的正前方停止,HV 的视线被 RV-2所遮挡;
2)HV 和 RV-1 需具备短程无线通信能力,RV-2 是否具备短程无线通信能力不影响应用场景的有效性;
3)RV-2 为了避开 RV-1 进行变道行驶;
4)HV 行驶过程中在即将与 RV-1 发生碰撞时,FCW 应用对 HV 驾驶员发出预警,提醒驾驶员与位于正前方的 RV-1 存在碰撞危险;
5)预警时机需确保HV驾驶员收到预警后,能有足够时间采取措施,避免与RV-1发生追尾碰撞。

1.3 系统基本原理
HV 行驶过程中,若与同一车道前方 RV 存在碰撞危险时,FCW 应用对 HV 驾驶员进行预警。
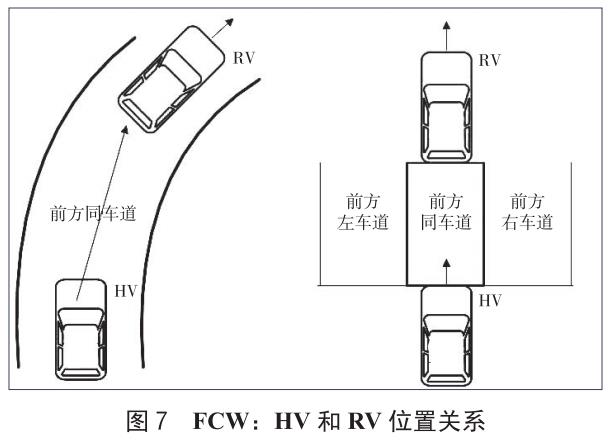
触发 FCW 功能的 HV 和 RV 位置关系如图 7,其中 HV 和 RV 在同一车道,RV 在 HV 的前方。该应用在直线车道或弯道车道均有效。
FCW 基本工作原理如下:
-
分析接收到的 RV 消息,筛选出位于同一车道前方(前方同车道)区域的 RV;
-
进一步筛选处于一定距离范围内的 RV 作为潜在威胁车辆;
-
计 算 每 一 个 潜 在 威 胁 车 辆 碰 撞 时 间(TTC:time-to-collision) 或 防 撞 距 离(collision avoidance range),筛选出与 HV 存在碰撞危险的威胁车辆;
-
若有多个威胁车辆,则筛选出最紧急的威胁车辆;
-
系统通过HMI对HV驾驶员进行相应的碰撞预警。
1.4 通信方式
HV和RV需具备短程无线通信能力,车辆信息通过短程无线通信在HV和RV之间传递(V2V)。
1.5 基本性能要求
FCW基本性能要求如下(指标参见附录C)
- 主车车速范围0~130km/h;
- 通信距离≥300m;
- 数据更新频率≤10Hz;
- 系统延迟≤100ms;
- 定位精度≤1.5m;
1.6 数据交互需求
FCW数据交互需求如表所示。
| 数据 | 单位 | 备注 |
|---|---|---|
| 时刻 | ms | |
| 位置(经纬度) | deg | |
| 位置(海拔) | m | |
| 车头方向角 | deg | |
| 车体尺寸(长、宽) | m | |
| 速度 | m/s | |
| 三轴加速度 | m/s2 | |
| 横摆角速度 | deb/s |
2 交叉路口碰撞预警
2.1 应用定义和预期效果
交叉路口碰撞预警(ICW:Intersection Collision Warning)是指,主车(HV)驶向交叉路口,与侧向行驶的远车(RV)存在碰撞危险时,ICW应用将对HV驾驶员进行预警。本应用适用于城市及郊区普通道路及公路的交叉路口、环道入口、高速路入口等交叉路口碰撞危险的预警。
ICW应用辅助驾驶员避免或诚轻侧向碰撞,提高交叉路口通行安全。
2.2 主要场景
ICW包括如下主要场景:
a)HV在路口起步(图8)
1)HV停止在路口,RV-1从左侧或右侧驶向路口,HV的视线可能被出现在路口的RV-2所 遮挡;
2)HV和RV-1需具备短程无线通信能力,RV-2是否具备短程无线通信能力不影响应用场景的有效性;
3)HV启动并准备进入路口时,ICW应用对HV驾驶员发出预警,提醒驾驶员与侧向来车RV-1存在碰撞危险;
4)预警时机需确保HV驾驶员收到预警后,能有足够时间采取措施,避免与RV-1发生碰撞。

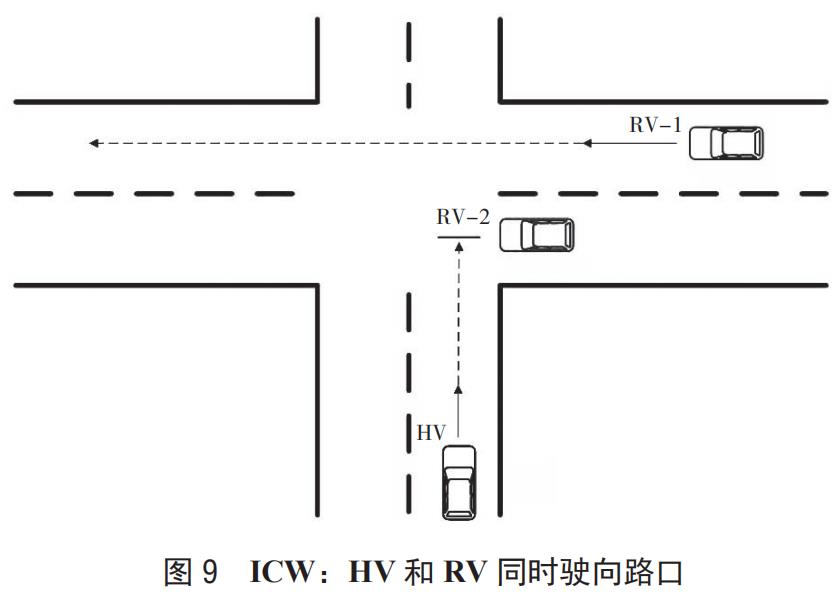
b)HV和RV同时驶向路口(图9)
1)HV驶向路口,同时RV-1从HV左侧或右侧驶向路口,HV的视线可能被出现在路口的RV-2所遮挡;
2)HV和RV-1需具备短程无线通信能力,RV-2是否具备短程无线通信能力不影响应用场景的有效性;
3)当HV驶近路口时,ICW应用对HV驾驶员发出预警,提醒驾驶员与侧向来车RV-1存在碰撞危险;
4)预警时机需确保HV驾驶员收到预警后,能有足够时间采取措施,避免与RV-1发生碰撞。
2.3 系统基本原理
HV驶向交叉路口,若与任意一辆驶向同一路口的RV存在碰撞危险时,CW应用对HV驾驶员进行预警。触发ICW功能的HV和RV位置关系如图10,其中HV和RV行驶方向不限于垂直交叉(90°),可为一定范围内的多角度交叉。

ICW基本工作原理如下:
- 分析接收到的RV消息,筛选出位于交叉路口左侧(intersecting left)或交叉路口右侧(intersecting right)区域的RV。RV消息可能是由RV发出或从路侧单元获取;
- 进一步筛选处于一定距离范围内的RV作为潜在威胁车辆;
- 计算每一个潜在威胁车辆到达路口的时间(TTI;time-to-intersection)和到达路口的距离(DTI;distance-to-intersection),筛选出与HV存在碰撞危险的威胁车辆;
- 若有多个威胁车辆,则筛选出最紧急的威胁车辆;
- 系统通过HMI对HV驾驶员进行相应的碰撞预警。
2.4 通信方式
HV和RV需具备短程无线通信能力,车辆信息通过短程无线通信在HV和RV之间传递(V2V);利用具备短程无线通信能力的路侧设备直接探测碰撞危险或远车信息,发送给主车(V2I)。
2.5 基本性能要求
ICW基本性能要求如下:
- 主车车速范围0~70km/h;
- 通信距离≥150m;
- 数据更新频率≤10Hz;
- 系统延迟≤100ms;
- 定位精度≤5m;
2.6 数据交互需求
ICW数据交互需求(远车数据)如表所示。
| 数据 | 单位 | 备注 |
|---|---|---|
| 时刻 | ms | |
| 位置(经纬度) | deg | |
| 位置(海拔) | m | |
| 车头方向角 | deg | |
| 车体尺寸(长、宽) | m | |
| 速度 | m/s | |
| 三轴加速度 | m/s^2 | |
| 横摆角速度 | deb/s |
3 左转辅助
3.1 应用定义和预期效果
左转辅助(LTA:LefǘTurn Assist)是指,主车(HV)在交叉路口左转,与对向驶来的远车(RV)存在碰撞危险时,LTA应用将对V驾驶员进行预警。本应用适用于城市及郊区普通道路及公路的交叉路口。
LTA应用辅助驾驶员避免或诚轻侧向碰撞,提高交叉路口通行安全。
3.2 主要场景
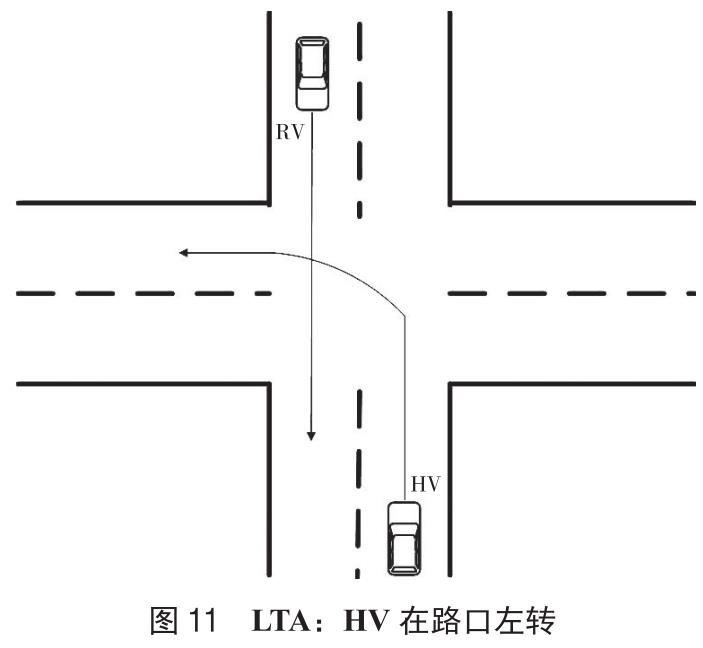
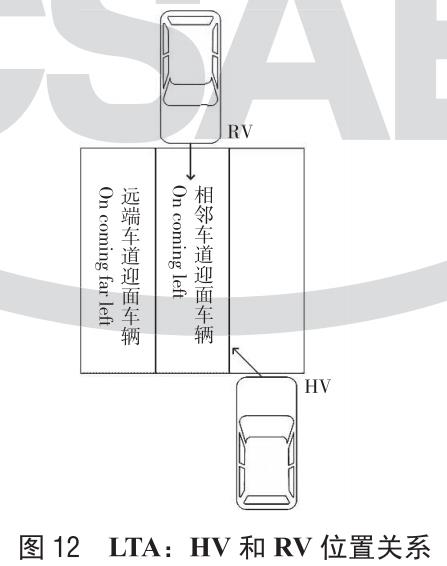
LTA的主要场景为,V在交叉路口左转,RV从对面驶向路口(图11)。具体描述如下:
- HV和RV同时从相对的方向驶向交叉路口;
- HV和RV需具备短程无线通信能力;
- HV启动并准备进入路口左转时,若系统检测到与对向来车RV存在碰撞危险,LTA应用对HV驾驶员发出预警;
- 预警时机需确保HV驾驶员收到预警后,能有足够时间采取措施,避免与V发生碰撞。
3.3 系统基本原理
HV驶向交叉路口左转行驶时,若与对向行驶车辆RV存在碰撞危险,LTA应用对HV驾驶员进行预警,触发LTA功能的HV和RV位置关系如果12。
LTA基本工作原理如下:
- 分析接收到的RV消息,筛选出位于HV相邻车道迎面车辆(oncoming left)和远端车道迎面车辆(oncoming far left)区域的RV;
- 进一步筛选处于一定距离范围内的RV作为潜在威胁车辆;
- 计算每一个潜在威肋车辆到达路口的时间(TTI:time-to-intersection)和到达路口的距离(DTI:distance–to-intersection),筛选出与HV存在碰撞危险的威胁车辆;
- 若有多个威胁车辆,则筛选出最紧急的威胁车辆;
- 系统通过HMI对HV驾驶员进行相应的碰撞预警。
3.4 通信方式
HV和RV需具备短程无线通信能力,车辆信息通过短程无线通信在HV和RV之间传递(V2V);利用具备短程无线通信能力的路侧设备直接探测碰撞危险或远车信息,发送给主车(V2I)。
3.5 基本性能要求
LTA基本性能要求如下:
- 主车车速范围0~70km/h;
- 通信距离≥150m;
- 数据更新频率≤10Hz;
- 系统延迟≤100ms;
- 定位精度≤5m;
3.6 数据交互需求
LTA数据交互需求(远车数据)如表所示。
| 数据 | 单位 | 备注 |
|---|---|---|
| 时刻 | ms | |
| 位置(经纬度) | deg | |
| 位置(海拔) | m | |
| 车头方向角 | deg | |
| 车体尺寸(长、宽) | m | |
| 速度 | m/s | |
| 三轴加速度 | m/s^2 | |
| 横摆角速度 | deb/s | |
| 转向信号 | 左转向灯是否激活 |
4 盲区预警/变道预警
4.1 应用定义和预期效果
盲区预警/变道预警(BSW/LCW:Blind Spot Warning/Lane Change Warning)是指,当主车(HV)的相邻车道上有同向行驶的远车(RV)出现在HV盲区时,BSW应用对HV驾驶员进行提醒;当主车(HV)准备实施变道操作时(例如激活转向灯等),若此时相邻车道上有同向行驶的远车(RV)处于或即将进入HV盲区,LCW应用对HV驾驶员进行预警。本应用适用于普通道路或高速公路等车辆变道可能存在碰撞危险的预警。
BSW/LCW应用避免车辆变道时,与相邻车道上的车辆发生侧向碰撞,提高变道安全。
4.2 主要场景
BSW/LCW包括如下主要场景:
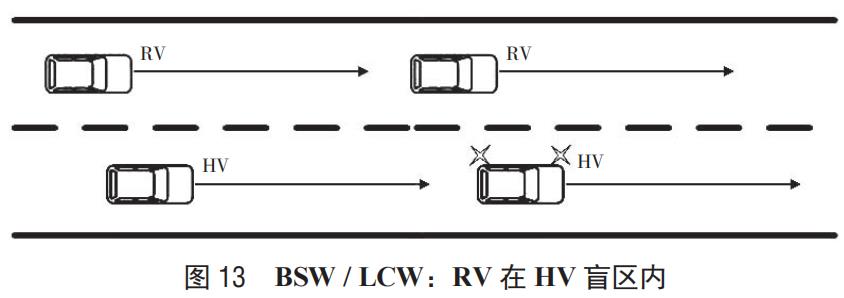
a)RV在HV盲区内(图13):
1)HV在本车道内行驶,RV在HV相邻车道内同向行驶,且RV处于HV盲区内;
2)BSW应用提醒HV驾驶员其盲区内存在车辆RV;
3)若此时检测到HV驾驶员有向RV所在车道变道的意图(例如激活转向灯或者根据方向盘转角综合判断),则LCW应用对HV驾驶员发出预警;
4)预警时机需确保HV驾驶员收到预警后,能有足够时间采取措施,避免与相邻车道上的RV发生碰撞。
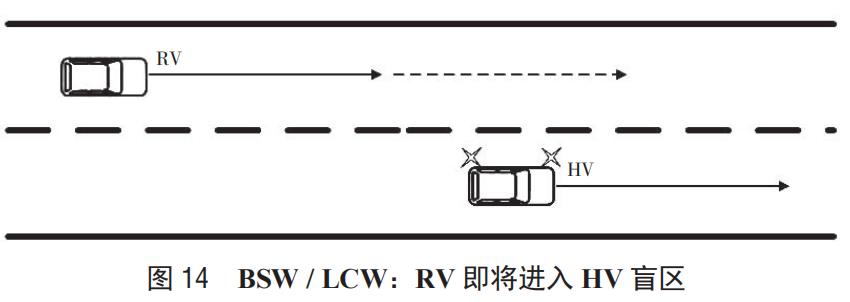
b)RV 即将进入 HV 盲区(图 14)
1)HV 在本车道内行驶,远车 RV 在相邻车道上与 HV 同向行驶,且即将进入 HV 的盲区;
2)BSW 应用提醒 HV 驾驶员即将有车辆进入其盲区;
3)若此时检测到 HV 驾驶员有向 RV 所在车道变道的意图(例如激活转向灯),则 LCW应用对 HV 驾驶员发出预警;
4)预警时机需确保 HV 驾驶员收到预警后,能有足够时间采取措施,避免与相邻车道上的RV 发生碰撞。
4.3 系统基本原理
当 HV 意图换道时,若检测到相邻车道上与 HV 同向行驶的车辆 RV 处于或即将进入 HV 盲区,BSW / LCW 应用对 HV 驾驶员进行预警。触发 BSW / LCW 功能的 HV 和 RV 位置关系如图 15。
BSW / LCW 应用适用于直道和弯道情形。

BSW / LCW 基本工作原理如下:
● 从接收到的 RV 消息中,筛选出位于 HV 左后相邻车道和右后相邻车道的 RV 作为潜在威胁车辆;
● 判断潜在威胁车辆是否处于或即将进入 HV 盲区;
● 如果潜在威胁车辆处于或即将进入 HV 盲区,首先对 HV 驾驶员进行 BSW 提醒;
● 如果潜在威胁车辆处于或即将进入 HV 盲区,而 HV 此时有变道操作,则对 HV 驾驶员进行LCW 报警;
● 系统通过 HMI 对 HV 驾驶员进行提醒或报警。
4.4 通信方式
HV 和 RV 需具备短程无线通信能力,车辆信息通过短程无线通信在 HV 和 RV 之间传递(V2V)。
4.5 基本性能要求
BSW / LCW 基本性能要求如下:
● 主车车速范围 0 ~ 130 km/h;
● 通信距离≥ 150 m;
● 数据更新频率≤ 10 Hz;
● 系统延迟≤ 100 ms;
● 定位精度≤ 1.5 m。
4.6 数据交互需求
BSW / LCW 数据交互需求如表 5。
| 数据 | 单位 | 备注 |
|---|---|---|
| 时刻 | ms | |
| 位置(经纬度) | deg | |
| 位置(海拔) | m | |
| 车头方向角 | deg | |
| 车体尺寸(长、宽) | m | |
| 速度 | m/s | |
| 三轴加速度 | m/s^2 | |
| 横摆角速度 | deb/s | |
| 转向信号 | 左转向灯是否激活 | |
| 方向盘转角 | deg |
6 逆向超车预警
6.1 应用定义和预期效果
逆向超车预警(DNPW:Do Not Pass Warning)是指,主车(HV)行驶在道路上,因为借用逆向车道超车,与逆向车道上的逆向行驶远车(RV)存在碰撞危险时,DNPW应用对HV驾驶员进行预警。本应用适用于城市及郊区普通道路及公路超车变道碰撞危险的预警。
DNPW应用辅助驾驶员避免或减轻超车过程中产生的碰撞,提高逆向超车通行安全。
6.2 主要场景
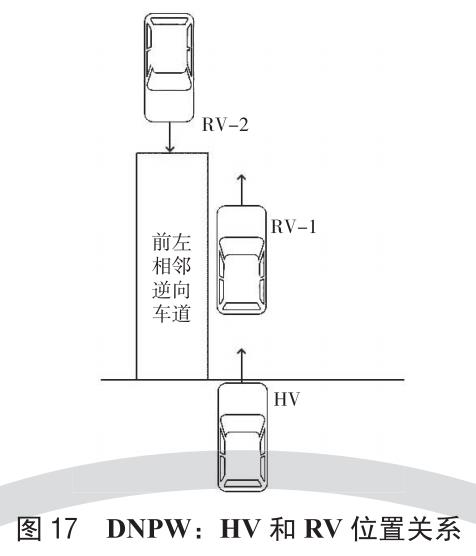
DNPW的主要场景为,HV逆向变道超车(图16)。具体描述如下:
- HV跟随RV-1行驶,HV准备超车,RV-2从相邻逆向车道上逆向行驶而来,HV的视线可能被RV-1遮挡;
- HV和RV-1、RV-2需具备短程无线通信能力;
- 当HV打开变道转向灯并准备进入逆行车道时,DNPW应用对HV驾驶员发出预警,提醒驾驶员与逆向来车RV-2存在碰撞危险;
- 预警时机需确保HV驾驶员收到预警后,能有足够时间采取措施,避免与RV-2发生碰撞。

6.3 系统基本原理
HV正常行驶过程中,打开转向灯准备变道时,若与相邻逆向车道上的远车RV-2存在碰撞危险,DNPW应用对HV驾驶员进行预警。触发DNPW功能的HV和远车RV-1、RV-2位置关系如图17。
DNPW基本工作原理如下:
- 分析接收到的RV消息,筛选出位于HV左前方相邻逆向车道逆向行驶的RV;
- 进一步筛选处于一定距离范围内的RV作为潜在威胁车辆;
- 计算每一个潜在威胁车辆到达碰撞点的时间(TTC:time-to-collision)和碰撞距离(DTC:distance–to-collision),筛选出与HV存在碰撞危险的威胁车辆;
- 若有多个威胁车辆,则筛选出最紧急的威胁车辆;
- 若发现HV主动进行变道超车动作,与逆向车道上的车辆碰撞条件成立,系统则通过HMI对HV驾驶员进行相应的碰撞预警。
6.4 通信方式
HV和RV需具备短程无线通信能力,车辆信息通过短程无线通信在HV和RV之间传递(V2V)。
6.5 基本性能要求
DNPW基本性能要求如下:
● 主车车速范围 0 ~ 70 km/h;
● 通信距离≥ 300 m;
● 数据更新频率≤ 10 Hz;
● 系统延迟≤ 100 ms;
● 定位精度≤ 1.5 m。
6.6 数据交互需求
DNPW数据交互需求(远车数据)如表。
| 数据 | 单位 | 备注 |
|---|---|---|
| 时刻 | ms | |
| 位置(经纬度) | deg | |
| 位置(海拔) | m | |
| 车头方向角 | deg | |
| 车体尺寸(长、宽) | m | |
| 速度 | m/s | |
| 三轴加速度 | m/s^2 | |
| 横摆角速度 | deb/s |
7 紧急制动预警
7.1 应用定义和预期效果
紧急制动预警(EBW:Emergency Brake Warning)是指,主车(HV)行驶在道路上,与前方行驶的远车(RV)存在一定距离,当前方 RV 进行紧急制动时,会将这一信息通过短程无线通信广播出来。HV 检测到 RV 的紧急制动状态,若判断该 RV 事件与 HV 相关,则对 HV 驾驶员进行预警。
本应用适用于城市郊区普通道路及高速公路可能发生制动追尾碰撞危险的预警。
EBW 应用辅助驾驶员避免或减轻车辆追尾碰撞,提高道路行驶通行安全。
7.2 主要场景
EBW 包括如下主要场景:
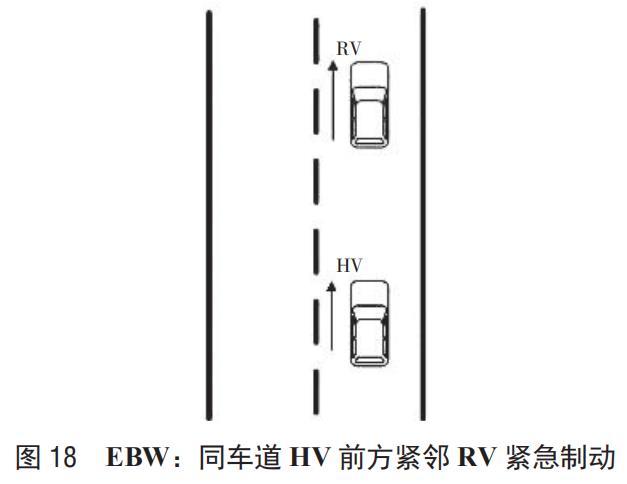
a)同车道(或相邻车道)HV 前方紧邻 RV 发生紧急制动(图 18):
1)HV 行驶在道路上,RV 发生紧急制动事件;
2)HV 和 RV 需具备短程无线通信能力;
3)EBW 应用对 HV 驾驶员发出预警,提醒驾驶员前方紧急制动操作存在碰撞危险;
4)预警时机需确保 HV 驾驶员收到预警后,能有足够时间采取措施,避免与 RV 发生追尾碰撞。
b)同车道(或相邻车道)HV 前方非紧邻 RV 发生紧急制动(图 19):
1)HV 行驶在道路上,其前方非紧邻的 RV-1 发生紧急制动事件,HV 的视线被紧邻的RV-2 所遮挡;
2)HV 和 RV-1、RV-2 需具备 V2X 通信能力;
3)EBW 应用对 HV 驾驶员发出预警,提醒驾驶员前方紧急制动操作存在碰撞危险;
4)预警时机需确保 HV 驾驶员收到预警后,能有足够时间采取措施,避免与 RV-2 和RV-1 发生追尾碰撞。

7.3 系统基本原理
相同或者相邻车道上,RV 发生紧急制动事件并对外广播,当 HV 通过行驶方向、距离、位置、速度等信息,判断该事件对 HV 具有潜在危险时,则对 HV 驾驶员进行预警。触发 EBW 功能的 HV和 RV 位置关系如图 20。

EBW基本工作原理如下:
- RV出现紧急制动事件时,将这一信息对外进行广播;
- HV接收到的RV信息时,判断其是否包含紧急制动事件
- HV将出现紧急制动事件的RV分类为前方相同车道和前方相邻车道;
- HV进一步根据车速、位置等信息判断该RV是否与HV相关,若存在潜在碰撞危险,则对HV驾驶员进行提醒。
7.4 通信方式
HV和RV需具备短程无线通信能力,车辆信息通过短程无线通信在HV和RV之间传递(V2V)。
7.5 基本性能要求
EBW基本性能要求如下:
● 主车车速范围 0 ~ 130 km/h;
● 通信距离≥ 150 m;
● 数据更新频率≤ 10 Hz;
● 系统延迟≤ 100 ms;
● 定位精度≤ 1.5 m。
7.6 数据交互需求
EBW数据交互需求(远车数据)如表。
| 数据 | 单位 | 备注 |
|---|---|---|
| 时刻 | ms | |
| 位置(经纬度) | deg | |
| 位置(海拔) | m | |
| 车头方向角 | deg | |
| 车体尺寸(长、宽) | m | |
| 速度 | m/s | |
| 纵向加速度 | m/s^2 | |
| 紧急制动状态 | 是否激活 |
8 异常车辆提醒
8.1 应用定义和预期效果
异常车辆提醒(AVW:Abnormal Vehicle Warning)是指,当远车(RV)在行驶中打开故障报警灯时,对外广播消息中显示当前“故障报警灯开启”,主车(HV)根据收到的消息内容,识别出其属于异常车辆;或者HV根据RV广播的消息,判断RV车速为静止或慢速(显著低于周围其他车辆),识别出其属于异常车辆。当识别出的异常车辆可能影响本车行驶路线时,AVW应用提醒HV驾驶员注意。本应用适用于城市及郊区普通道路及公路的交叉路口、环道入口、高速路入口等环境中的异常车辆提醒。
AVW应用辅助驾驶员及时发现前方异常车辆,从而避免或减轻碰撞,提高通行安全。
8.2 主要场景
AVW包括如下主要场景:
a)异常车辆开启故障报警灯(图21):
1)HV在道路上正常行驶,RV在HV前方相同或相邻车道内;
2)HV和RV需具备短程无线通信能力;
3)RV开启故障报警灯,并在对外广播的消息中携带“故障报警灯开启”信息,AVW应用对HV驾驶员发出预警,提醒驾驶员前方有异常车辆;
4)预警时机需确保HV驾驶员收到预警后,能由足够时间采取措施,避免与RV发生碰撞。

b)异常车辆未开启故障报警灯(图22):
1)HV在道路上正常行驶,RV在HV前方相同或相邻车道内;
2)HV和RV需具备短程无线通信能力;
3)RV为静止或者慢速车辆,在对外广播的消息中携带自身位置、速度、朝向等的信息,HV根据这些信息判断RV为静止车辆或慢速车辆(车速显著低于周围其他车辆)。
AVW应用对HV驾驶员发出预警,提醒驾驶员前方有异常车辆行驶;
4)预警时机需确保HV驾驶员收到预警后,能有足够时间采取措施,避免与RV发生碰撞。

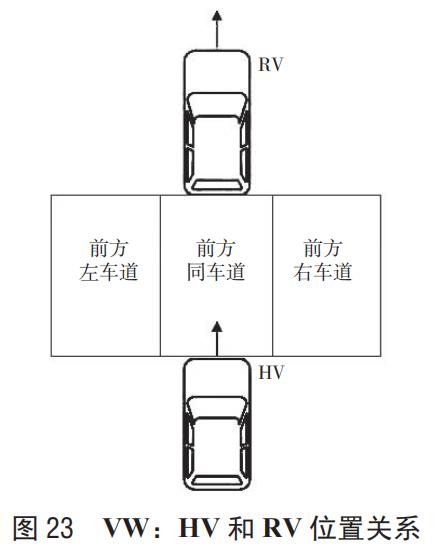
8.3 系统基本原理
HV在道路上行驶,若收到前方RV发出的“故障报警灯开启”信息,或者分析RV发送消息中的速度、位置、朝向等信息,并结合其他RV车辆的车速信息,识别该RV车辆处于静止/慢速行驶的异常状态,若判断其与 HV 存在碰撞危险,则及时报警;若有多个威胁车辆,则筛选出最紧急的威胁车辆。触发 VW 功能的 HV 和 RV 位置关系如图 23。
8.4 通信方式
HV 和 RV 需具备短程无线通信能力,车辆信息通过短程无线通信在 HV 和 RV 之间传递(V2V)。
8.5 基本性能要求
AVW 基本性能要求如下:
● 主车车速范围 0 ~ 130 km/h;
● 通信距离≥ 150 m;
● 数据更新频率≤ 10 Hz;
● 系统延迟≤ 100 ms;
● 定位精度≤ 5 m。
8.6 数据交互需求
AVW 数据交互需求(远车数据)如表 8。
| 数据 | 单位 | 备注 |
|---|---|---|
| 时刻 | ms | |
| 位置(经纬度) | deg | |
| 位置(海拔) | m | |
| 车头方向角 | deg | |
| 速度 | m/s | |
| 异常状态信息 | 远车“故障报警灯开启”信息、车辆静止或慢速行驶判断等 |
9 车辆失控预警
9.1 应用定义和预期效果
车辆失控预警 (CLW:Control Loss Warning)是指,当远车(RV)出现制动防抱死系统(ABS)、车身稳定性系统(ESP)、牵引力控制系统(TCS)、车道偏移预警系统(LDW)功能触发时,RV对外广播此类状态信息,若主车(HV)根据收到的消息识别出该车属于车辆失控,且可能影响自身行驶路线时,则 CLW 应用对 HV 驾驶员进行提醒。本应用适用于城市、郊区普通道路及高速公路可能发生车辆失控碰撞危险的预警。
CLW 基于通信的终端,可以将车辆内部电控系统的功能触发 / 失控等信息,及时对外广播,便于周边车辆迅速采取避让等处置措施,避免由于某一车辆失控导致与周边车辆碰撞事故发生。
9.2 主要场景描述
CLW 包括如下主要场景:
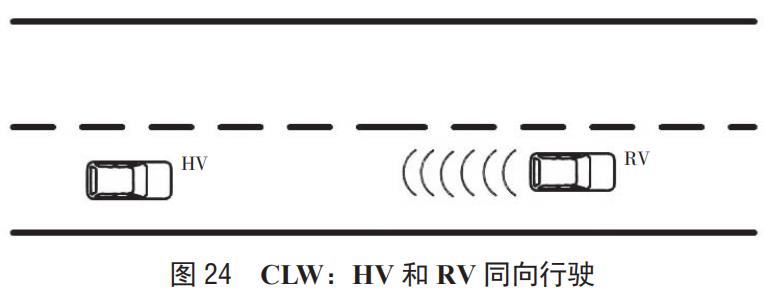
a)HV 和 RV 同向行驶(图 24):
1)HV 和 RV 均具备短程无线通信能力;
2)HV 和 RV 同向行驶,HV 在 RV 的后方;
3)RV 制动防抱死系统(ABS)、车身稳定性系统(ESP)、牵引力控制系统(TCS)、车道偏移预警系统(LDW)功能触发;
4)RV 广播车辆失控状态信息,HV 接收信息,CLW 应用对 HV 驾驶员发出预警,提醒驾驶员注意;
5)预警时机需确保 HV 驾驶员收到预警后,能有足够时间采取措施,避免与 RV 发生碰撞。
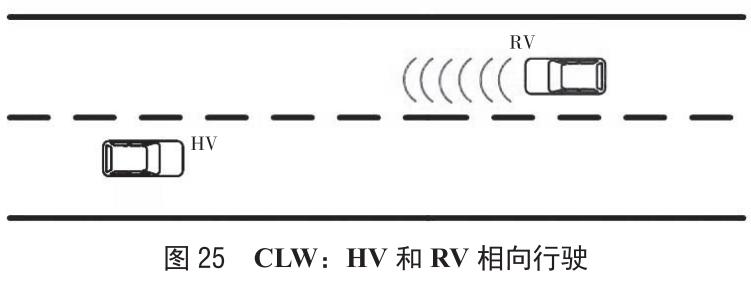
b)HV 和 RV 相向行驶(图 25):
1)HV 和 RV 均具备短程无线通信能力;
2)HV 和 RV 相向行驶,距离逐渐接近;
3)RV 制动防抱死系统(ABS)、车身稳定性系统(ESP)、牵引力控制系统(TCS)、车道偏移预警系统(LDW)功能触发;
4)RV 广播车辆失控状态信息,HV 接收信息,CLW 应用对 HV 驾驶员发出预警,提醒驾驶员注意;
5)预警时机需确保 HV 驾驶员收到预警后,能有足够时间采取措施,避免与 RV 发生碰撞。
9.3 系统基本原理
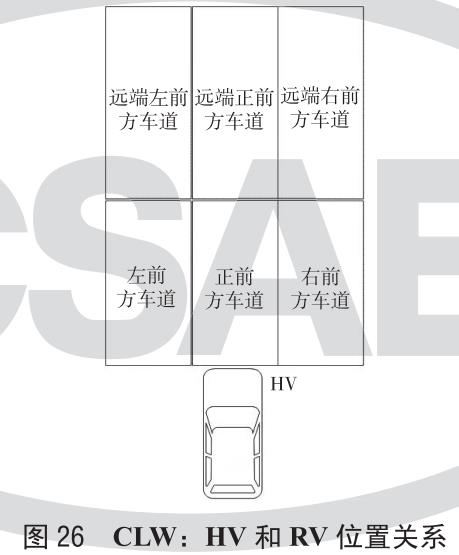
HV和RV同向行驶(不限于在同一车道内),若RV出现车辆失控预警且与后方HV存在碰撞危险时,CLW应用对HV驾驶员进行预警。HV和RV在相邻车道相向行驶,若RV在与HV会
车前出现车辆失控,且与相向行驶的HV存在碰撞危险时,CLW应用对HV驾驶员进行预警。触发CLW功能的HV和RV的位置关系如图26(RV可位于HV前方车道的六个区域内)。
CLW基本工作原理如下:
- HV分析接收到的RV消息;
- 计算出HV与RV的相对距离和发生碰撞的时间;
- 系统通过HMI对HV驾驶员进行相应的碰撞预警
9.4 通信方式
HV和RV需具备短程无线通信能力,车辆信息通过短程无线通信在HV和RV之间传递(V2V)。
9.5 基本性能要求
CLW基本性能要求如下:
-
主车车速范围0~130km/h;
-
通信距离≥ 300 m;
-
数据更新频率≤ 10 Hz;
-
系统延迟≤ 100 ms;
-
定位精度≤ 5 m。
9.6 数据交互需求
AVW数据交互需求(远车数据)如表。
| 数据 | 单位 | 备注 |
|---|---|---|
| 时刻 | ms | |
| 位置(经纬度) | deg | |
| 位置(海拔) | m | |
| 速度 | m/s | |
| 加速度 | m/s^2 | |
| ABS状态 | Valid/invalid | |
| ESP状态 | Valid/invalid | |
| TCS状态 | Valid/invalid | |
| LDW状态(左右) | Valid/invalid | |
| 其他失控状态 | ||
| 车头方向角 | deg | |
| 车体尺寸(长、宽) | m |
10 道路危险状况提示
10.1 应用定义和预期效果
道路危险状况提示(HLW:Hazardous Location Warning)是指,主车(HV)行驶到潜在危险状况(如桥下存在较深积水、路面有深坑、道路湿滑、前方急转弯等)路段,存在发生事故风险时,HLW应用对HV驾驶员进行预警。本应用适用于城市道路、郊区道路和高速公路等容易发生危险状况的路段或者临时性存在道路危险状况的路段。
HLW应用将道路危险状况及时通知周围车辆,便于驾驶员提前进行处置,提高车辆对危险路况的感知能力,降低驶入该危险区域的车辆发生事故的风险。
10.2 主要场景
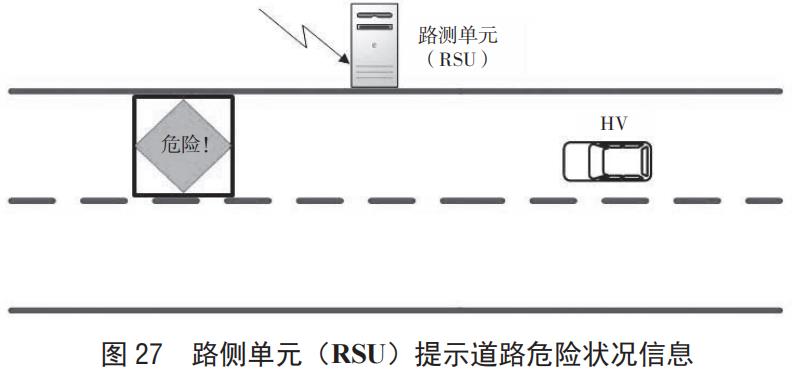
当道路存在危险状况时,附近路侧单元(RSU)或临时路侧设备对外广播道路危险状况提示信息,包括:位置、危险类型、危险描述等,行经该路段的HV根据信息及时采取避让措施,避免发生事故(图27)。
10.3 系统基本原理
HLW 基本工作原理如下:
● 具备短程无线通信能力的路侧单元(RSU)周期性对外广播道路危险状况提示信息;
● HV 依据自身位置信息和道路危险状况提示信息,计算与道路危险区域的距离;
● HV 依据当前速度计算到达道路危险区域的时间;
● 系统通过 HMI 对驾驶员进行及时的预警。
10.4 通信方式
HV 和 RSU 需具备短程无线通信能力,RSU 将道路危险状况信息发送给 HV(V2I)。
10.5 基本性能要求
HLW 基本性能要求如下:
● 主车车速范围 0 ~ 130 km/h;
● 通信距离≥ 300 m;
● 数据更新频率≤ 5 Hz;
● 系统延迟≤ 100 ms;
● 定位精度≤ 5 m。
10.6 数据交互需求
HLW 数据交互需求(路侧数据)如表 10。
| 数据 | 单位 | 备注 |
|---|---|---|
| 时刻 | ms | |
| 道路危险位置(经纬度) | deg | |
| 道路危险位置(海拔) | m | |
| 道路危险状况类型 | INTEGER | |
| 道路危险状况描述 | STRING |
11 限速预警
11.1 应用定义和预期效果
限速预警(SLW:Speed Limit Warning)是指,主车(HV)行驶过程中,在超出限定速度的情况下,SLW 应用对 HV 驾驶员进行预警,提醒驾驶员减速行驶。本应用适用于普通道路及高速公路等有限速的道路。
SLW 应用辅助驾驶员避免超速行驶,消除安全隐患,减少事故的发生。
11.2 主要场景
HV 和路测单元(RSU)需具备短程无线通信能力。HV 行驶时,RSU 周期性发送特定路段的限速信息。当 HV 判断自己在 RSU 指示的特定路段,且车速超过 RSU 的速度限值时,SLW 应用对HV 驾驶员发出预警,提醒驾驶员减速行驶。
11.3 系统基本原理
SLW 基本工作原理如下:
● HV 分析接收到的 RSU 消息。提取限速路段信息和具体限速大小;
● 根据车辆本身的定位和行驶方向,将自身定位到特定路段上;
● 如果 HV 检测到自己处在限速路段区域内,则判断自身是否在限速范围内;
● 如果不满足限速要求,则触发 SLW 报警。系统通过 HMI 对 HV 驾驶员进行相应的限速预警,提醒驾驶员减速。
11.4 通信方式
HV 和路侧单元(RSU)需具备短程无线通信能力,信息通过短程无线通信在路侧单元和 HV之间传递(V2I)。
11.5 基本性能要求
SLW 基本性能要求如下:
● 主车车速范围 0 ~ 130 km/h;
● 通信距离≥ 300 m;
● 数据更新频率≤ 1 Hz;
● 系统延迟≤ 100 ms;
● 定位精度≤ 5 m。
11.6 数据交互需求
HLW 数据交互需求(路侧数据)如表 11。
| 数据 | 单位 | 备注 |
|---|---|---|
| 时刻 | ms | |
| RSU经纬度 | deg | |
| RSU海拔 | m | |
| 限速区域范围 | ||
| 速度限制 | m/s |
12 闯红灯预警
12.1 应用定义和预期效果
闯红灯预警(RLVW:Red Light Violation Warning)是指,主车(HV)经过有信号控制的交叉口(车道),车辆存在不按信号灯规定或指示行驶的风险时,RLVW应用对驾驶员进行预警。本应用适用于城市及郊区道路及公路的交叉路口、环道出人口和可控车道、高速路入口和隧道等有信号控制的车道。闯红灯过程见图28。
RLVW应用辅助驾驶员安全通过信号灯路口,提高信号灯路口的通行安全。

12.2 主要场景
当前方有大车遮挡视线(图29)或恶劣天气影响视线,或由于其他原因,使HV无法对当前红灯或即刻到来的红灯做出正确判断时,RLVW检测HV当前所处位置和速度等,通过计算预测车头经过路口停止线时信号灯的状态,并向驾驶员进行预警。

12.3 系统基本原理
当HV驶向具有信号控制的交叉路口(车道),遇信号灯即将变红或正处在红灯状态,但车辆未能停止在停止线内而继续前行时,RLVW应用将对该车驾驶员进行预警。触发RLVW功能的HV与路口设施位置关系如图30。

RLVW基本工作原理如下:
- 具有短程、远程通信能力的路测单元(RSU)定时发送路口地理信息和信号灯实时状态信息;
- HV依据本身GNSS地理信息,确定当前受管控信号的相位,并计算其与停止线的距离;
- HV依据当前速度和其他交通参数预估到达路口的时间;
- RLVW将这些信息与接收到的红灯切换时刻及红灯保留时长信息进行对比分析,决定是否预警。
12.4 通信方式
具备短程、远程无线通信能力的路侧设备,将有关交叉口(车道)信息广播给具有短程通信能力的车辆(V2I)。
12.5 基本性能要求
RLVW基本性能要求如下:
● 主车车速范围 0 ~ 70 km/h;
● 通信距离≥ 150 m;
● 数据更新频率≤ 5 Hz;
● 系统延迟≤ 100 ms;
● 定位精度≤ 1.5 m。
12.6 数据交互需求
RLVW数据交互需求(路侧数据)如表。
| 数据 | 单位 | 备注 |
|---|---|---|
| 时刻 | ms | |
| 路口ID | deg | |
| 入口ID | m | |
| 车道宽度 | m | |
| 车道中心线位置 | m/s | |
| 车道属性 | 左、直、右和掉头 | |
| 车道所属相位 | ||
| 当前灯态 | 针对该车道每一个车道属性(允许行驶方向)的信号灯状态 | |
| 红变绿剩余时间/绿变红剩余时间 | s | 可预测一个周期或两个周期 |
| 红绿灯配时是否自适应控制 | 自适应控制时,绿灯剩余时间会改变(周期内或下一个周期) |
13 弱势交通参与者碰撞预警
13.1 应用定义和预期效果
弱势交通参与者碰撞预警(VRUCW:Vulnerable Road User Collision Warning)是指,主车(HV)在行驶中,与周边行人(P,Pedestrian。含义拓展为广义上的弱势交通参与者,包括行人、自行车、电动自行车等,以下描述以行人为例)存在碰撞危险时,VRUCW 应用将对车辆驾驶员进行预警,也可对行人进行预警。本应用适用于城市及郊区普通道路及公路的碰撞危险预警。
VRUCW 应用辅助驾驶员避免或减轻与侧向行人(P)碰撞危险,提高车辆及行人通行安全。
13.2 主要场景
VRUCW 包括如下主要场景:
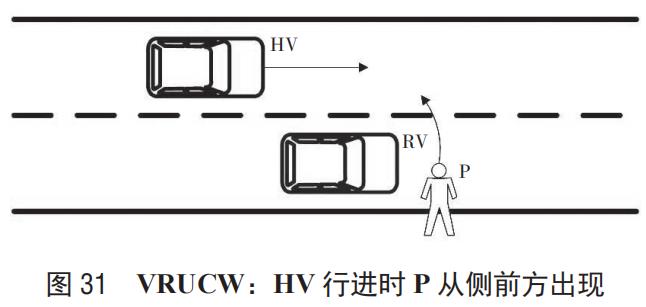
a)HV 行进时行人 P 从侧前方出现(图 31)
1)HV 在行进时,P 从侧前方出现,HV 的视线可能被出现在路边的 RV 所遮挡;
2)HV 和 P 需具备短程无线通信能力,RV 是否具备短程无线通信能力不影响应用场景的有效性;
3)HV 接近 P 时,如果检测到可能发生碰撞的危险,VRUCW 应用对 HV 驾驶员发出预警,同时也可对 P 发出预警,提醒驾驶员与侧向 P 存在碰撞危险;
4)预警时机需确保 HV 驾驶员收到预警后,能有足够时间采取措施,避免与 P 发生碰撞。
b)HV 倒车预警(图 32):
1)HV 在倒车时,P 从 HV 侧后方出现,HV 的视线可能被两侧车辆遮挡,也可能由于是盲区等原因,使得 HV 的驾驶员不能及时发现;
2)HV 和 P 需具备短程无线通信能力,周边 RV 是否具备该能力不影响预警效果;
3)HV 接近 P 时,如果检测到可能存在碰撞的危险,VRUCW 应用对 HV 驾驶员发出预警,也可以同时对 P 发出预警,提醒驾驶员这一危险;
4)预警时机需确保 HV 驾驶员收到预警后,能有足够时间采取措施,避免与 P 发生碰撞。

c)通过路侧设备(I)检测行人并对车辆预警在场景 a)、
b)的基础上,如果 P 不具备通信能力,路侧设备(I)可通过摄像头、微波雷达等传感器检测周边行人(P),并广播行人(P)的相关信息,VRUCW 应用对可能发生碰撞的车辆驾驶员发出预警。
13.3 基本工作原理
VRUCW 基本工作原理如下:
● HV 分析接收到的行人(P)消息,筛选出与车辆行驶方向上可能发生冲突的行人;
● 进一步筛选处于一定距离或者时间范围内的行人作为潜在威胁行人;
● 计算与每一个(或者成组)行人的碰撞时间 TTC(time-to-collision),筛选出存在碰撞威胁的行人;
● 若存在多个威胁行人(或行人组),则筛选出最紧急的威胁行人(或行人组);
● 系统对 HV 驾驶员进行相应的碰撞预警。
13.4 通信方式
HV 和 P 需具备短程无线通信能力,车辆信息通过短程无线通信在 HV 和 P 之间传递(V2P);或利用路侧感知系统对行人信息进行感知,通过路侧设备发给车辆(V2I)。
13.5 基本性能要求
VRUCW 基本性能要求如下:
● 主车车速范围 0 ~ 70 km/h;
● 通信距离≥ 150 m;
● 数据更新频率≤ 5 Hz;
● 系统延迟≤ 100 ms;
● 定位精度≤ 5 m。
13.6 数据交互需求
VRUCW数据交互需求如表。
VRUCW数据交互需求(车辆数据)
| 数据 | 单位 | 备注 |
|---|---|---|
| 时间 | ms | |
| 位置(经纬度) | deg | |
| 位置(海拔) | m | |
| 车头方向角 | deg | |
| 车体尺寸(长、宽) | m | |
| 速度 | m/s | |
| 纵向加速度 | m/s^2 | |
| 横摆角速度 | deg/s | |
| 驾驶行为类型 | ENUM | |
| 重量 | kg | |
| 车辆类型 | ENUM | |
| 历史路径 | SEQUENCE | |
| 路径预测 | SEQUENCE | |
| 事件类型 | INTEGER |
VRUCW数据交互需求(行人数据)
| 数据 | 单位 | 备注 |
|---|---|---|
| 时间 | ms | |
| 位置(经纬度) | deg | |
| 位置(海拔) | m | |
| 行进方向角 | deg | |
| 速度 | m/s | |
| 基本类型 | ENUM。行人、自行车、道路工作者、动物 | |
| 位置精确度 | ||
| 四维加速度 | ||
| 历史路径 | SEQUENCE | |
| 路径预测 | SEQUENCE | |
| 动力 | STRING。人力、动物、电动 | |
| 使用状态 | STRING。打字、听音乐、打电话、阅读 | |
| 人群 | STRING | |
| 人群半径 | m | |
| 职业类型 | ENUM。拖车人员,救火人员,急救人员… | |
| 道路工作人员类型 | STRING。道路施工、指挥交通、设置标志… | |
| 指挥交通工作类型 | STRING。 | |
| 行人被辅助类型 | STRING。视力、听力、行动、认知… | |
| 通过街道请求 | BOOLEAN | |
| 通过街道状态 | BOOLEAN | |
| 用户身材 | STRING | |
| 其他个人信息:比如健康状况等 | 集合 |
注意:V2P场景,数据信息由P主动发出。
VRUCW数据交互需求(路侧数据)
| 数据 | 单位 | 备注 |
|---|---|---|
| 时间 | ms | |
| 行人位置(经纬度) | deg | |
| 行人位置(海拔) | m | |
| 行人行进方向角 | deg | |
| 行人速度 | m/s | |
| 基本类型 | ENUM。行人、自行车、道路工作者、动物 | |
| 消息总数 | INTEGER | |
| 位置精确度 | N/A | |
| 行人四维加速度 | N/A | |
| 历史路径 | SEQUENCE | |
| 路径预测 | SEQUENCE | |
| 动力 | STRING。人力、动物、电动 | |
| 人群 | STRING | |
| 人群半径 | m | |
| 通过街道请求 | BOOLEAN | |
| 通过街道状态 | BOOLEAN | |
| 行人身材 | STRING |
注意:I2V场景,数据信息由路侧设备I检测并发出。
14 绿波车速引导
14.1 应用定义和预期效果
绿波车速引导(GLOSA:Green Light Optimal Speed Advisory)是指,当装载车载单元(OBU)的HV驶向信号灯控制交叉路口,收到由路侧单元(RSU)发送的道路数据及信号灯实时状态数据时,GLOSA 应用将给予驾驶员一个建议车速区间,以使车辆能够经济地、舒适地(不需要停车等待)通过信号路口。本应用适用于城市及郊区普通道路信号灯控制路口。
GLOSA 应用能辅助驾驶应用,提高车辆通过交叉路口的经济性和舒适性,提升交通系统效率。
14.2 主要场景
GLOSA 主要场景见图 33。具体描述如下:
● HV 从远处接近信号灯控制路口;
● 路侧通信设备发出局部道路数据信息及从路口信号机处获得信号灯数据信息和实时状态信息;
● GLOSA 应用根据上述信息,给出 HV 前方信号灯的实时状态,并结合 HV 的定位和行驶状态信息,计算出通过路口的引导车速区间。

14.3 基本工作原理
GLOSA 基本工作原理如下:
● HV 根据收到的道路数据,以及本车的定位和运行数据,判定本车在路网中所处的位置和运行方向;
● 判断车辆前方路口是否有信号灯,提取信号灯对应相位的实时状态;若有信号灯信息,则可直接显示给驾驶员;
● GLOSA 应用根据本车的位置,以及信号灯对应相位的实时状态,计算本车能够在本次或下次绿灯期间不停车通过路口所需的最高行驶速度和最低行驶速度,并进行提示。
14.4 通信方式
具备短程无线通信能力的路侧设备,将道路数据与信号灯实时状态数据,发送给 HV(V2I)。
14.5 基本性能要求
GLOSA 为效率类 V2X 应用,适用于市区或郊区有信号控制路口的路网,该应用对定位精度和数据的实时性要求相较安全类应用为低。
GLOSA 基本性能要求如下:
● 车辆速度范围 0 ~ 70 km/h;
● 通信距离≥ 150 m;
● 道路数据集更新频率≤ 1 Hz;
● 信号灯数据集更新频率≤ 5 Hz;
● 系统延迟≤ 200 ms;
● 定位精度≤ 5 m。
14.6 数据交互需求
GLOSA 数据交互需求(路侧数据)如表 16。
| 数据集 | 包含数据单元 | 备注 |
|---|---|---|
| 时刻 | 单位ms | |
| 道路数据集 | 节点 | 路口节点 |
| 路段 | 路口之间的路段 | |
| 车道 | 路段中的车道 | |
| 连接转向关系 | 路口处各路段出入连接关系 | |
| 信号灯数据集 | 静态信息 | 信号灯周期、相位 |
| 实时状态信息 | 信号灯当前状态和倒计时 | |
| 转向-相位关系 | 路口处转向和信号灯相位的对应关系 |
15 车内标牌
15.1 应用定义和预期效果
车内标牌(IVS:In-Vehicle Signage)是指,当装载车载单元(OBU)的 HV 收到由路侧单元(RSU)发送的道路数据以及交通标牌信息,IVS 应用将给予驾驶员相应的交通标牌提示,保证车辆的安全行驶。本应用适用于任何交通道路场景。
IVS 能提高车辆行驶的安全性。
15.2 主要场景
IVS 的主要场景如图 34。具体描述如下:
● HV 从远处接近相应的路侧单元(RSU)
路侧单元(RSU)发出局部道路数据信息,以及相应的交通标牌信息;
VS应用根据上述信息,结合自车的定位和行驶状态,计算出自车在路网中的位置,并判断前方是否有交通标识牌,如果有,则通过车内标牌对驾驶员进行提示。车内交通标牌会在
消息有效的区域和时间段内亮起。

15.3 基本工作原理
IVS基本工作原理如下:
- HV根据收到的道路数据,以及本车的定位和运行数据,判定本车在路网中所处的位置和运行方向;
- 判断车辆前方道路是否有交通标牌,以及在当前时间段该标牌是否有效。若是,则直接显示给驾驶员。
15.4 通信方式
具备短程无线通信能力的路侧设备,将道路数据与交通标牌信息,发送给HV(V2I)。
15.5 基本性能要求
-
车辆速度范围 0 ~ 70 km/h;
-
通信距离≥ 150 m;
-
道路数据与交通标牌信息更新频率≤ 1Hz;
-
系统延迟≤ 500 ms;
-
定位精度≤ 5 m。
15.6 数据交互需求
IVS数据交互需求(路侧数据)如表。
| 数据集 | 包含数据单元 | 备注 |
|---|---|---|
| 时刻 | 单位ms | |
| 道路数据集 | 节点 | 路口节点 |
| 路段 | 路口之间的路段 | |
| 车道 | 路段中的车道 | |
| 连接转向关系 | 路口处各路段出入连接关系 | |
| 交通标牌信息 | 标牌内容 | 交通标牌所标识的内容 |
| 指示范围 | 交通标牌指示的路段范围 | |
| 有效时间 | 交通标牌的有效时间 |
16 前方拥堵提醒
16.1 应用定义和预期效果
前方拥堵提醒(TJW:Traffic Jam Warning)是指,主车(HV)行驶前方发生交通拥堵状况,路侧单元(RSU)将拥堵路段信息发送给HV,TJW应用将对驾驶员进行提醒。本应用适用于城市及郊区普通道路及高速公路拥堵路段的预警。
TW应用提醒驾驶员前方路段拥堵,有助于驾驶员合理制定行车路线,提高道路通行效率。
16.2 主要场景
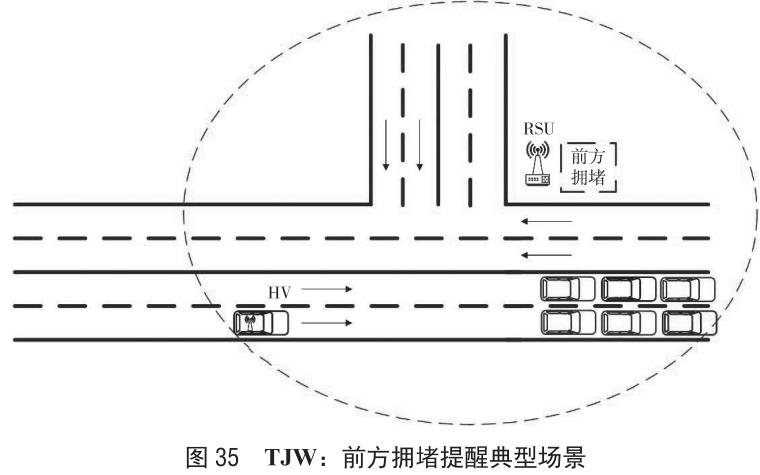
TJW主要场景如图35。具体描述如下:
- HV从远处接近相应的路侧单元(RSU),路侧单元(RSU)周期性广播局部道路拥堵数据信息;
- TW应用根据上述信息,结合本车的定位和行驶状态,计算出本车在路网中的位置,并判断前方是否有拥堵,如果有,则对驾驶员进行前方拥堵的提示。
16.3 系统基本原理
TJW 基本工作原理如下:
● HV 根据收到的道路数据,以及本车的定位和运行数据,判定本车在路网中所处的位置和运行方向;
● 判断车辆前方道路是否有交通拥堵。若有,则直接提醒驾驶员。
16.4 通信方式
具备短程无线通信能力的路侧设备(RSU),将直接探测到的拥堵信息,或将 ITS 系统中的拥堵路段信息,发送给 HV(V2I);利用具备短程无线通信能力的车辆可将前方道路拥堵信息转发给后方车辆(V2V)。
16.5 基本性能要求
TJW 基本性能要求如下:
● 主车车速范围 0 ~ 130 km/h;
● 通信距离≥ 150 m;
● 数据更新频率≤ 1 Hz;
● 系统延迟≤ 500 ms;
● 定位精度≤ 5 m。
16.6 数据交互需求
TJW 数据交互需求如表。
| 数据 | 单位 | 备注 |
|---|---|---|
| 拥堵起止点位置(经纬度) | deg | 路侧设备周期性广播 |
| 拥堵程度 | 分为 5 级:畅通、基本畅通、轻度拥堵、中度拥堵、严重拥堵;路侧设备周期性广播 |
17 紧急车辆提醒
17.1 应用定义和预期效果
紧急车辆提醒(EVW:Emergency Vehicle Warning)是指,主车(HV)行驶中,收到紧急车辆提醒,以对消防车、救护车、警车或其他紧急呼叫车辆等进行让行。
EVW 使 HV 实现对消防车、救护车、警车或其他紧急呼叫车辆的让行。
17.2 主要场景
当紧急车辆接近 HV 时,提示 HV 让行的典型场景如图 36。具体描述如下:
● HV 行驶中,紧急车辆 RV 接近 HV;
● HV 和 RV 需具备短程无线通信能力;
● HV 收到紧急车辆提醒时,对紧急车辆 RV 进行让行。
