第十七届全国大学生智能汽车竞赛讯飞-家庭服务机器人挑战赛全国总决赛规则
Posted 卓晴
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了第十七届全国大学生智能汽车竞赛讯飞-家庭服务机器人挑战赛全国总决赛规则相关的知识,希望对你有一定的参考价值。

一、赛项简介
1.1 赛事背景
伴随着人工智能技术的不断发展与进步,如何让相关技术再有新的突破,从当前的局部智能,迈向更先进的通用智能,这是所有人工智能行业从业者的共同目标。人工智能技术的发展不仅要推动算力、算法和数据的发展,也要推动硬件设施与应用场景的突破;不仅能够服务高精尖的科研场所,也要贴近日常生活的百姓家;不仅能驱动工业发展,也要细致入微融入居家陪护。面对一切的挑战,科大讯飞勇攀高峰,启动了“讯飞超脑 2030计划”,旨在让人工智能懂知识、善学习、能进化,让机器人带着智慧走进千家万户,成为家庭的一员,主人的“贤内助”。正是基于这样的背景,科大讯飞(苏州)科技有限公司将本次比赛的主题定义为“家庭服务”,以人工智能技术驱动智能车,让车能听能看能思考,让 Ta不仅仅只是“车”。此外,我们也希望通过本次比赛的圆满举办,推动机器人(人工智能)相关专业在高校的人才培养体系建设,为上下游的产业生态伙伴储备优秀人才。
1.2 赛事目的
本次比赛旨在通过赛事以及相关的赛前培训培养学生的机器人相关专业基础知识以及团队协作能力。比赛所涉及知识点涵盖了移动机器人领域的 SLAM、组合导航、路径规划等被广泛应用的机器人技术,并且与人工智能领域相关的自然语言处理、深度学习、机器视觉等内容做了融合。
1.3 赛事准备
本次比赛所涉及知识点涵盖了移动机器人领域的 SLAM、组合导航、路径规划等技术,并且与人工智能领域相关的自然语言处理、深度学习、机器视觉等内容做了融合。
选手在参赛前,需掌握移动机器人和人工智能相关基础理论知识,如:Linux、ROS相关工具及操作系统的操作基础。
二、参赛要求及赛程安排
2.1 参赛要求
1、讯飞创意组比赛作为智能车竞赛的创意比赛面向全国全日制在校研究生、本科生和职业院校学生。
2、每支队伍选手不超过 5人(其中最多 1名研究生),指导老师不超过 2人。
3、参赛队以学校为单位进行报名,晋级全国总决赛时,每校限1支队伍。比赛分本科和职业院校两个组别,报名时须明确希望参加的组别。
4、每位学生可同时参加竞速组别和创意组别的比赛,但在三个创意组别内只可报名其中一个。
5、参赛选手报名须保证所提供的个人信息真实、准确、有效,否则取消选手参赛资格。
三、竞赛方案
3.1 竞赛任务简介
本次比赛设定的场景为家庭服务机器人(智能车)在居家环境下,根据主人的要求,完成语音交互、房间标定、信息传递等工作。选手需根据比赛具体要求,开展智能车相关功能的调试,使其在指定场地中完成工作。
3.2 比赛要求
3.2.1 软件环境
本次比赛基于嵌入式计算平台,参赛选手需预装 Ubuntu18.04系统,预装软件包括但不限于 TensorFlow、TensorRT、ROS。
3.2.2 比赛场地
比赛场地平面总尺寸为 6m×6m由单片 30cm×50cm(高×长)的 PP塑料挡板构成,设有智能车启动区、房间识别区、停车区等组成要素,赛场内会随机设置若干个 30cm×50cm障碍板/小型障碍物。
- 机器人启动区(A区):智能车出发位置;
- 房间识别区(B、C、D区):智能车到达并停留区域,根据标识物识别房间类型。
- 任务交付区(E区):智能车完成停车任务及语音播报任务的区域。
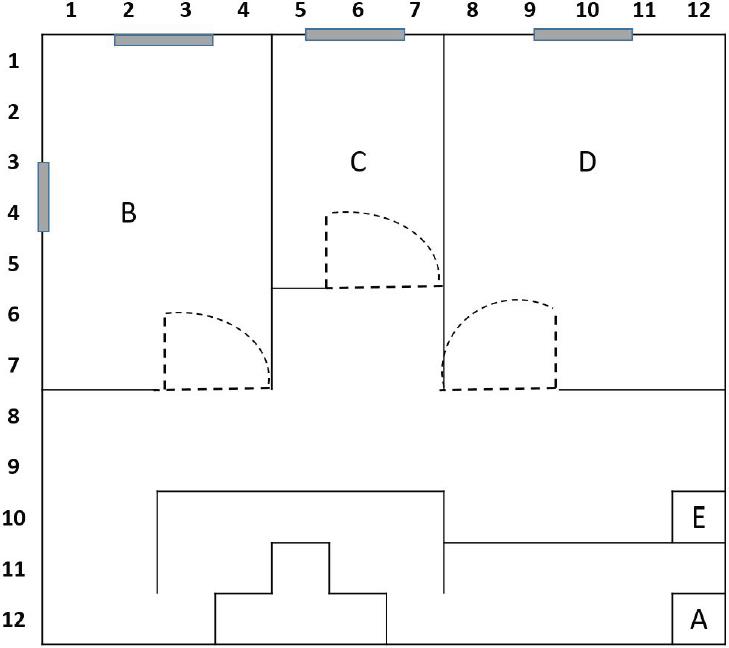

注:场地分隔板材之间的连接方式为上下各一个直径 70mm的圆柱形连接件,在进行竞赛时注意保持安全距离。
3.2.3 关于障碍物
每次比赛中会设置有 3个障碍物,每次挑战,车模运行时要避开障碍物,否则比赛时会有相应处罚,障碍物位置会在障碍区中随机摆放的,但会保证最小可通过距离不小于 50cm。
关于障碍物:
- 尺寸:
30cm×50cm,与场地边框使用同一材质; - 放置方法:
50cm边贴地放置 - 放置规则:障碍物的出现区域按如下图所示,障碍物出现的组合会在开赛日进行抽取。共抽取
3种组合,每支赛队参赛时均为抽取的三种组合,且不会出现道路最小距离小于50cm的情况。

- 例如:队长会抽取的结果为
1、2、3、4区域,则在选手参赛时的三次挑战中会遇到1+2+3、1+2+4、2+3+4、1+3+4四种组合中的三种,但是每个组合的出现顺序随机。
3.2.4 比赛用车模
本次竞赛仅允许使用,讯飞 U-CAR晓版本或讯飞 U-CAR晓 mini版本的车模。两版本车模均禁止进行增加、去除、修改控制器、执行器、传感器、电池等改装操作。
- 产品外观
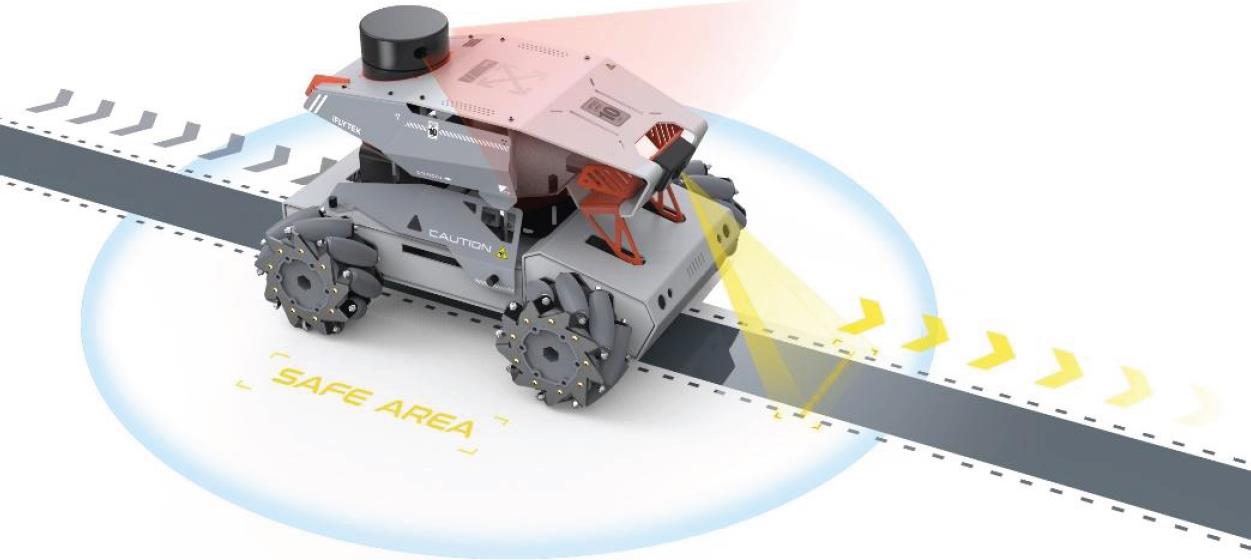

- 产品规格
比赛用车组成部分包括:车体平台(车体、上位机 JetsonNano处理器、麦克风阵列、IMU惯导模块、单目摄像头、激光雷达、下位机 STM32F4控制器、电机、麦克纳姆轮)1套、电池充电器 1套。
| 传感器 | 指标 |
|---|---|
| AI 传感器1 : 环形6MIC 阵列 | 6 个麦克风、360°声源定位、5 米收音范围、USB通信、支持自定义唤醒词(无限次数)、板载声源定位及回声消除算法、支持实现全双工语音交互。 |
| AI 传感器2: AHRS 姿态检测模块 | 精度roll:0.02°,pitch:0.02°,YAW:0.05° 检测范围:Roll:±180°,Pitch:±90°,YAW:±180° 通信接口:板载UART |
| AI 传感器3: RGB 相机 | 工作原理:单目超广角 彩色图像分辨率: 19201080@30FPS 、1280720@30FPS、640*480@30FPS 视场角:水平FOV124.8°、垂直FOV67°、对角 FOV160° 焦距:2.8mm F/NO(Infinite):2.6±5% 物距:45cm-100m |
| AI 传感器4: 激光雷达 | 工作原理:三角测距 测距频率:4000-9000Hz 扫描距离:0.1m-16m(扫描频率4000Hz) 0.28m-16m(扫描频率9000Hz) 相对误差:2% 扫描角度:0-360° 角度分辨率:0.28° |
3.3 比赛任务
-
前置任务:每个队伍上场比赛时,在制定的时间段内,在组委会的监督下进行平台部署和设备调试。
-
赛题任务:围绕比赛主题家庭服务机器人,在指定的比赛时
间段内,进行多段子任务。- 子任务 1:智能车经语音唤醒启动;
- 子任务 2:智能车从出发区离开,移动至户型识别区(B区),并根据识别到的信息判断房间类型;
- 子任务 3:智能车从出发区离开,移动至户型识别区(C区),并根据识别到的信息判断房间类型;
- 子任务 4:智能车从出发区离开,移动至户型识别区(D区),并根据识别到的信息判断房间类型;
- 子任务 5:智能车到达指定停车区,完成停车任务;
- 子任务 6:智能车使用语音播报房间类型;
-
规则详情:
A.关于语音控制:
在任务中可语音协助小车脱困或控制小车移动,但是不可经由控制命令将比赛任务传达给小车,在停泊区禁止使用,每场不得超过 3次;需将使用的命令写在操作手册中。
B.关于识别任务:
任务 2、3、4智能车完全进入区域,视为完成任务,到达各房间的先后顺序可自行调整。
C.物体信息:
B\\C\\D三个房间可能为:餐厅、卧室、客厅。房间内物品可能出
现的物品如下表所示
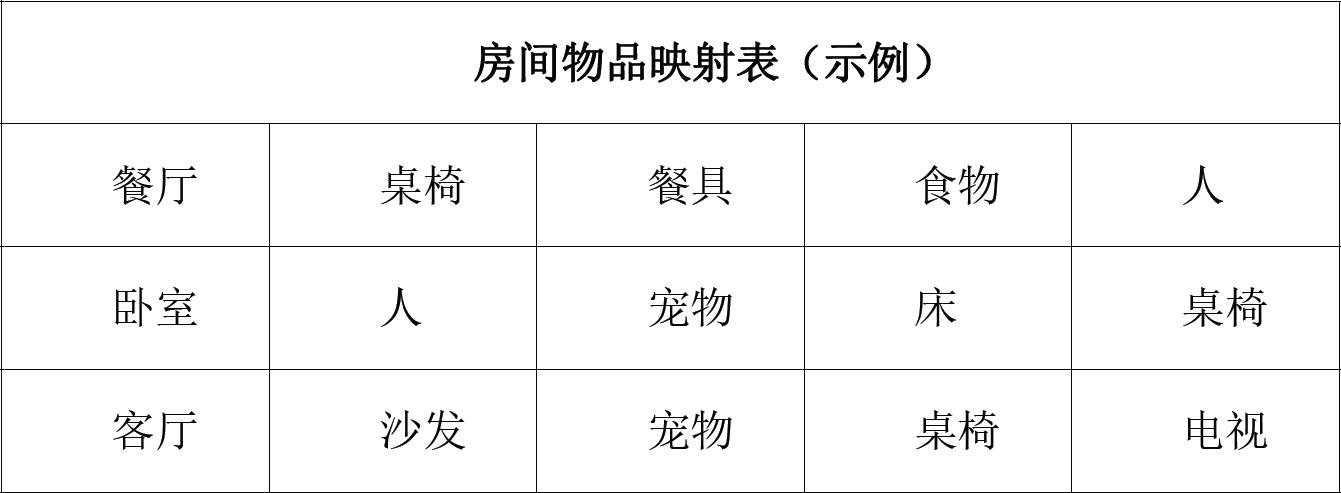
- 注:B\\C\\D三个房间在种类抽取时将视作独立事件,房间之间的抽取结果相互独立,即可能会出现重复房间种类的情况。
D.关于停泊:
2个轮子在停泊区域内视为未完成停泊,本次竞赛成绩不计入排名,3个轮子在停泊区域内视为未完全完成停泊,罚时 10s,4个轮子均在停泊区域内视为完成停泊。
E.关于语音播报:
任务 6视为 3个子任务,B\\C\\D三个房间识别正确一个记为完成一个子任务。语音播报格式为:任务完成,B房间为 X,C房间为 Y,D房间为 Z。语音播报需在停车完成后的 30秒内开始播报,60秒内完成播报。
F.作品提交:
参赛队伍需提交参赛代码包、镜像文件、技术报告至组委会。提交链接在开赛前分发至各参赛队。
G.违规处理
比赛过程中出现违规或异常情况按照以下方式处理:
1) 裁判发令后,机器人在 60秒内没有启动,比赛得分记为 0。
2) 机器人冲出场地、机器人失控则比赛结束,当前得分作为最终得分。
3) 机器人完成赛题任务过程中,停止运行超过 60秒,比赛立即结束,当前成绩记为比赛最终成绩。
4) 机器人触碰围栏或障碍物连续超过 30秒,比赛结束,以当前成绩记为比赛最终成绩。
其他未尽事宜,组委会有最终解释权。
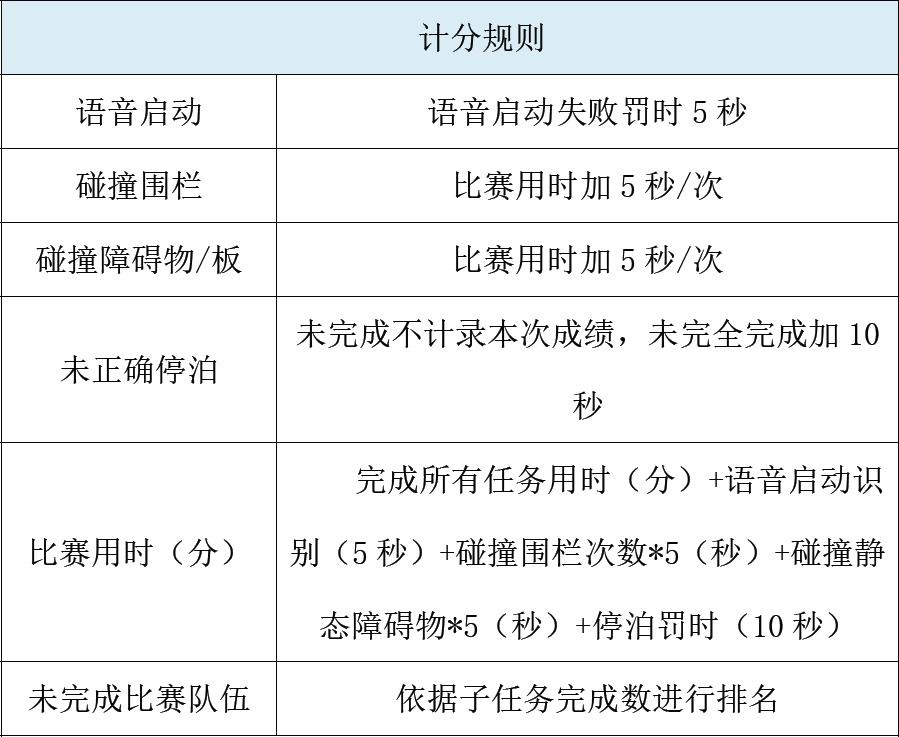
3.4 比赛计分规则
以上是关于第十七届全国大学生智能汽车竞赛讯飞-家庭服务机器人挑战赛全国总决赛规则的主要内容,如果未能解决你的问题,请参考以下文章