youcans 的 OpenCV 例程200篇182.基于形态学梯度的分水岭算法
Posted 小白YouCans
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了youcans 的 OpenCV 例程200篇182.基于形态学梯度的分水岭算法相关的知识,希望对你有一定的参考价值。
【youcans 的 OpenCV 例程200篇】180.基于距离变换的分水岭算法
【youcans 的 OpenCV 例程200篇】181.基于 Sobel 梯度的分水岭算法
【youcans 的 OpenCV 例程200篇】182.基于形态学梯度的分水岭算法
【youcans 的 OpenCV 例程200篇】183.基于轮廓标记的分水岭算法
【youcans 的 OpenCV 例程200篇】184.鼠标交互标记的分水岭算法
【youcans 的 OpenCV 例程200篇】182.基于形态学梯度的分水岭算法
7. 图像分割之分水岭算法
分水岭算法是一种图像区域分割法,以临近像素间的相似性作为重要特征,从而将空间位置相近且灰度值相近的像素点互相连接起来,构成一个封闭的轮廓。
分水岭算法是基于形态学的图像分割方法,体现了边缘检测、阈值处理和区域提取的概念和思想,往往会产生更稳定的分割结果。算法的实现过程可以理解为洪水淹没的过程:最低点首先被淹没,然后水逐渐淹没整个山谷;水位升高到一定高度就会溢出,于是在溢出位置修建堤坝;不断提高水位,重复上述过程,直到所有的点全部被淹没;所建立的一系列堤坝就成为分隔各个盆地的分水岭。
分水岭的计算过程是一个迭代标注过程,通过寻找集水盆和分水岭对图像进行分割。经典的分水岭算法分为排序过程和淹没过程两个步骤,首先对每个像素的灰度级从低到高排序,然后在从低到高的淹没过程中,对每一个局部极小值在 h 阶高度的影响域进行判断及标注。
OpenCV 提供了函数 cv.watershed 实现基于标记的分水岭算法。
使用函数 cv.watershed 需要输入一个CV_32S 类型的标记图像,图像中每个非零像素代表一个标签。对图像中部分像素做标记,表明它的所属区域是已知的。
cv.watershed(image, markers[, ] ) → markers
参数说明:
- image:输入图像,8-bit/3-channel 彩色图像
- markers:标记图像,32-bit 单通道图像,大小与 image 相同
注意事项:
- 分水岭算法要求必须在标记图像 markers 中用索引勾勒出需要分割的区域,每个区域被赋值为 1、2、3… 等索引编号,对应于不同的目标物体。
- 图像标记 markers 中未知区域的像素值设置为 0,通过分水岭算法确定这些像素属于背景还是前景区域。
- 输出的图像标记 markers 中,每个像素都被赋值为 1、2、3… 等索引编号,或以 -1 表示区域之间的边界(分水岭)。
OpenCV 提供了函数 cv.distanceTransform 实现距离变换,计算图像中每个像素到最近的零像素点的距离。
函数说明:
cv.distanceTransform(src, distanceType, maskSize[, dst=None, dstType=CV_32F]) → dst
cv.distanceTransformWithLabels(src, distanceType, maskSize[, dst=None, labels=None, labelType=DIST_LABEL_CCOMP]) → dst, labels
参数说明:
- src:输入图像,8-bit 单通道灰度图像
- distanceType:距离的类型
- cv.DIST_USER:用户定义的距离
- cv.DIST_L1: d i s t = ∣ x 1 − x 2 ∣ + ∣ y 1 − y 2 ∣ dist = |x1-x2|+|y1-y2| dist=∣x1−x2∣+∣y1−y2∣
- cv.DIST_L2:欧几里德距离
- cv.DIST_C: d i s t = m a x ( ∣ x 1 − x 2 ∣ , ∣ y 1 − y 2 ∣ ) dist = max(|x1-x2|, |y1-y2|) dist=max(∣x1−x2∣,∣y1−y2∣)
- maskSize:距离变换遮罩的大小,通常取 3, 5
- labelType:生成的标签数组的类型
- cv.DIST_LABEL_CCOMP:每个连接的零组件(及最接近连接组件的所有非零像素)被指定相同的标签
- cv.DIST_LABEL_PIXEL:每个零像素(及离它最近的所有非零像素)都有自己的标签
- dst:计算距离的输出图像,8-bit 或 32-bit 单通道图像,大小与 src 相同
- labels:标签的输出图像,CV_32SC1类型, 大小与 src 相同
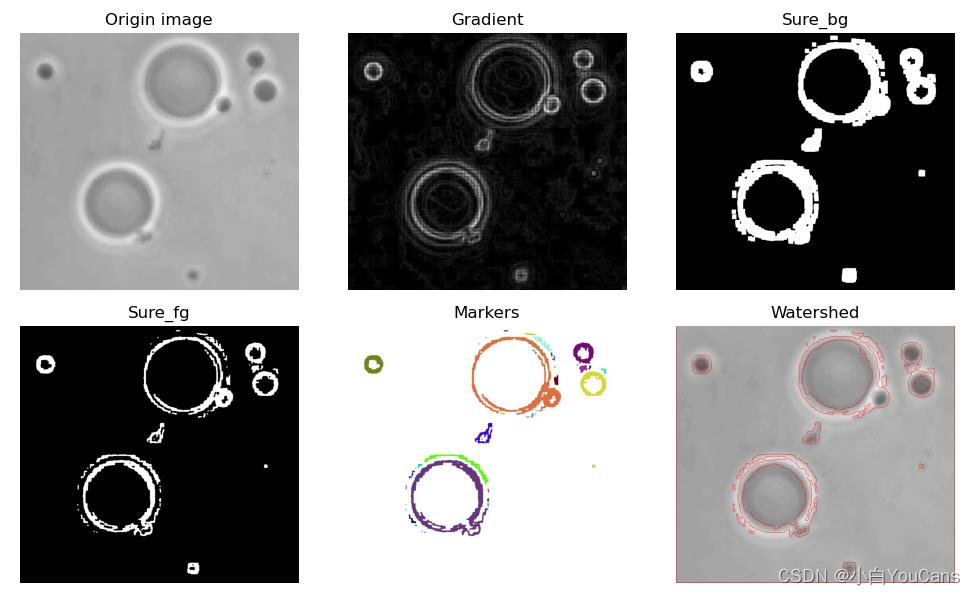
例程 11.39 基于形态学梯度的分水岭算法
梯度处理可以使用 Sobel、Canny 梯度算子,也可以用形态学梯度操作获得梯度图像。
基于梯度的分水岭算法对微弱的边缘有着良好的响应,但图像中的噪声容易导致图像的过分割。对此,在对梯度图像进行阈值分割转换为二值图像后,运用开运算消除噪点非常重要,可以有效地抑制梯度图像的过分割。
# 11.39 基于形态学梯度的分水岭算法
img = cv2.imread("../images/Fig1039a.tif", flags=1) # 读取彩色图像(BGR)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # 转为灰度图像
# 图像的形态学梯度
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (5, 5)) # 生成 5*5 结构元
grad = cv2.morphologyEx(gray, cv2.MORPH_GRADIENT, kernel) # 形态学梯度
# 阈值分割,将灰度图像分为黑白二值图像
_, thresh = cv2.threshold(np.uint8(grad), 0.2*grad.max(), 255, cv2.THRESH_BINARY)
# 形态学操作,生成 "确定背景" 区域
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (3, 3)) # 生成 3*3 结构元
opening = cv2.morphologyEx(thresh, cv2.MORPH_OPEN, kernel, iterations=2) # 开运算,消除噪点
sure_bg = cv2.dilate(opening, kernel, iterations=3) # 膨胀操作,生成 "确定背景" 区域
# 距离变换,生成 "确定前景" 区域
distance = cv2.distanceTransform(opening, cv2.DIST_L2, 5) # DIST_L2: 3/5
_, sure_fg = cv2.threshold(distance, 0.1 * distance.max(), 255, 0) # 阈值选择 0.1*max 效果较好
sure_fg = np.uint8(sure_fg)
# 连通域处理
ret, component = cv2.connectedComponents(sure_fg, connectivity=8) # 对连通区域进行标号,序号为 0-N-1
markers = component + 1 # OpenCV 分水岭算法设置标注从 1 开始,而连通域编从 0 开始
kinds = markers.max() # 标注连通域的数量
maxKind = np.argmax(np.bincount(markers.flatten())) # 出现最多的序号,所占面积最大,选为底色
markersBGR = np.ones_like(img) * 255
for i in range(kinds):
if (i!=maxKind):
colorKind = [np.random.randint(0, 255), np.random.randint(0, 255), np.random.randint(0, 255)]
markersBGR[markers==i] = colorKind
# 去除连通域中的背景区域部分
unknown = cv2.subtract(sure_bg, sure_fg) # 待定区域,前景与背景的重合区域
markers[unknown == 255] = 0 # 去掉属于背景的区域 (置零)
# 分水岭算法标注目标的轮廓
markers = cv2.watershed(img, markers) # 分水岭算法,将所有轮廓的像素点标注为 -1
kinds = markers.max() # 标注连通域的数量
# 把轮廓添加到原始图像上
imgWatershed = img.copy()
imgWatershed[markers == -1] = [0, 0, 255] # 将分水岭算法标注的轮廓点设为红色
print(img.shape, markers.shape, markers.max(), markers.min(), ret)
plt.figure(figsize=(10, 6))
plt.subplot(231), plt.axis('off'), plt.title("Origin xupt")
plt.imshow(cv2.cvtColor(img, cv2.COLOR_BGR2RGB)) # 显示 img(RGB)
plt.subplot(232), plt.axis('off'), plt.title("Gradient")
plt.imshow(grad, 'gray') # 钝化掩蔽
plt.subplot(233), plt.axis('off'), plt.title("Sure_bg")
plt.imshow(sure_bg, 'gray') # 确定背景
plt.subplot(234), plt.axis('off'), plt.title("Sure_fg")
plt.imshow(sure_fg, 'gray') # 确定前景
plt.subplot(235), plt.axis('off'), plt.title("Markers")
# plt.imshow(markers, 'gray') # 图像标注
plt.imshow(cv2.cvtColor(markersBGR, cv2.COLOR_BGR2RGB))
plt.subplot(236), plt.axis('off'), plt.title("Watershed")
plt.imshow(cv2.cvtColor(imgWatershed, cv2.COLOR_BGR2RGB))
plt.tight_layout()
plt.show()
(本节完)
版权声明:
OpenCV 例程200篇 总目录-202205更新
youcans@xupt 原创作品,转载必须标注原文链接:(https://blog.csdn.net/youcans/article/details/124813539)
Copyright 2022 youcans, XUPT
Crated:2022-5-15
欢迎关注 『youcans 的 OpenCV 例程 200 篇』 系列,持续更新中
欢迎关注 『youcans 的 OpenCV学习课』 系列,持续更新中【youcans 的 OpenCV 例程200篇】147. 图像分割之孤立点检测
【youcans 的 OpenCV 例程200篇】148. 图像分割之线检测
【youcans 的 OpenCV 例程200篇】149. 图像分割之边缘模型
【youcans 的 OpenCV 例程200篇】150. 边缘检测梯度算子
【youcans 的 OpenCV 例程200篇】151. 边缘检测中的平滑处理
【youcans 的 OpenCV 例程200篇】152. 边缘检测之 LoG 算子
【youcans 的 OpenCV 例程200篇】153. 边缘检测之 DoG 算子
【youcans 的 OpenCV 例程200篇】154. 边缘检测之 Canny 算子
【youcans 的 OpenCV 例程200篇】155. 边缘连接的局部处理方法
【youcans 的 OpenCV 例程200篇】156. 边缘连接局部处理的简化算法
【youcans 的 OpenCV 例程200篇】157. 霍夫变换直线检测
【youcans 的 OpenCV 例程200篇】158. 阈值处理之固定阈值法
【youcans 的 OpenCV 例程200篇】159. 图像分割之全局阈值处理
【youcans 的 OpenCV 例程200篇】160. 图像处理之OTSU 方法
【youcans 的 OpenCV 例程200篇】161. OTSU 阈值处理算法的实现
【youcans 的 OpenCV 例程200篇】162. 全局阈值处理改进方法
【youcans 的 OpenCV 例程200篇】163. 基于边缘信息改进全局阈值处理
【youcans 的 OpenCV 例程200篇】164.使用 Laplace 边缘信息改进全局阈值处理
【youcans 的 OpenCV 例程200篇】165.多阈值 OTSU 处理方法
【youcans 的 OpenCV 例程200篇】166.自适应阈值处理
【youcans 的 OpenCV 例程200篇】167.基于移动平均的可变阈值处理
【youcans 的 OpenCV 例程200篇】168.图像分割之区域生长
【youcans 的 OpenCV 例程200篇】169.图像分割之区域分离
【youcans 的 OpenCV 例程200篇】170.图像分割之K均值聚类
【youcans 的 OpenCV 例程200篇】171.SLIC 超像素区域分割
【youcans 的 OpenCV 例程200篇】172.SLIC 超像素区域分割算法比较
【youcans 的 OpenCV 例程200篇】173.SEEDS 超像素区域分割
【youcans 的 OpenCV 例程200篇】174.LSC 超像素区域分割
【youcans 的 OpenCV 例程200篇】175.超像素区域分割方法比较
【youcans 的 OpenCV 例程200篇】176.图像分割之均值漂移算法
【youcans 的 OpenCV 例程200篇】177.图像分割之 GraphCuts 图割法
【youcans 的 OpenCV 例程200篇】178.图像分割之 GrabCut 图割法(框选前景)
【youcans 的 OpenCV 例程200篇】179.图像分割之 GrabCut 图割法(掩模图像)
【youcans 的 OpenCV 例程200篇】180.基于距离变换的分水岭算法
【youcans 的 OpenCV 例程200篇】181.基于 Sobel 梯度的分水岭算法
【youcans 的 OpenCV 例程200篇】182.基于形态学梯度的分水岭算法
以上是关于youcans 的 OpenCV 例程200篇182.基于形态学梯度的分水岭算法的主要内容,如果未能解决你的问题,请参考以下文章
youcans 的 OpenCV 例程200篇182.基于形态学梯度的分水岭算法
youcans 的 OpenCV 例程200篇179.图像分割之 GrabCut 图割法(掩模图像)