ROS机器人从起点到终点完成
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS机器人从起点到终点完成相关的知识,希望对你有一定的参考价值。
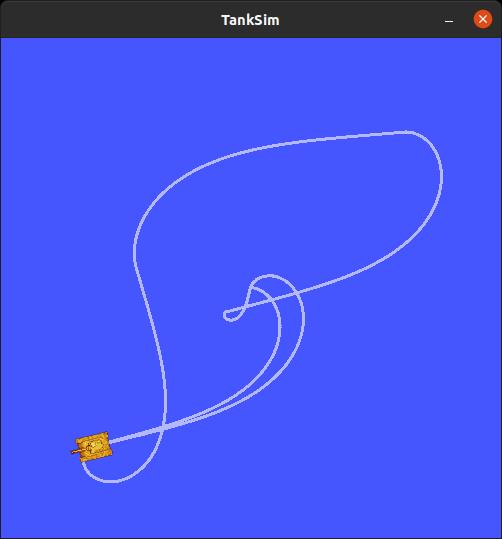
这是一个起点到终点勉强及格的完成版本。
输入坐标,到达指定位置!
最终效果如下:
修改CMakelist:
add_executable(move src/move.cpp)
target_link_libraries(move $catkin_LIBRARIES)
add_dependencies(move turtlesim_gencpp)程序参考:
#include "ros/ros.h"
#include "turtlesim/Pose.h"
#include "geometry_msgs/Twist.h"
#include "math.h"
#include <sstream>
ros::Subscriber sub;
ros::Publisher pub;
float goal_x = 2;
float goal_y = 2;
void sendVel(const turtlesim::Pose::ConstPtr& data)
ros::NodeHandle n;
pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel",100);
float curr_x = data->x;
float curr_y = data->y;
float curr_ang = data->theta;
float dist = sqrt(pow(goal_x-curr_x,2) + pow(goal_y-curr_y,2));
std::cout << "Distance = " << dist << std::endl;
if(dist > 0.01)
double ang = atan2((float)(goal_y-curr_y),(float)(goal_x-curr_x));
std::cout << "Curr_ang = " << curr_ang << " | ang = " << ang << std::endl;
geometry_msgs::Twist t_msg;
t_msg.linear.x = 1.0*(dist);
t_msg.angular.z = 4.0*(ang-curr_ang);
pub.publish(t_msg);
else
std::cout << "Mission Completed" << std::endl;
std::cout << "Please enter new coordinates" << std::endl;
std::cout << "Please enter goal_x:" << std::endl;
std::cin >> goal_x;
std::cout << "Please enter goal_y:" << std::endl;
std::cin >> goal_y;
int main(int argc, char **argv)
ros::init(argc,argv,"goToGoal");
ros::NodeHandle n;
sub = n.subscribe("/turtle1/pose",100,sendVel);
ros::spin();
return 0;
运行命令如下:
rosrun turtlesim move
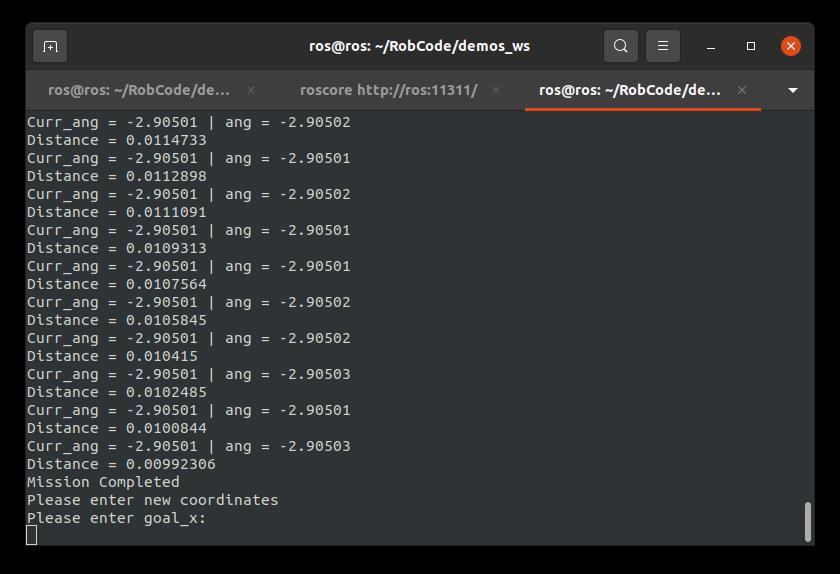
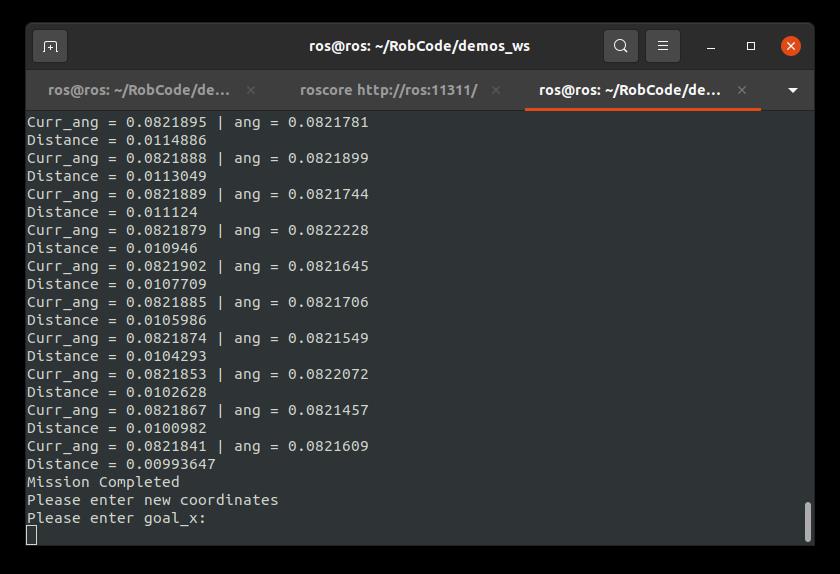
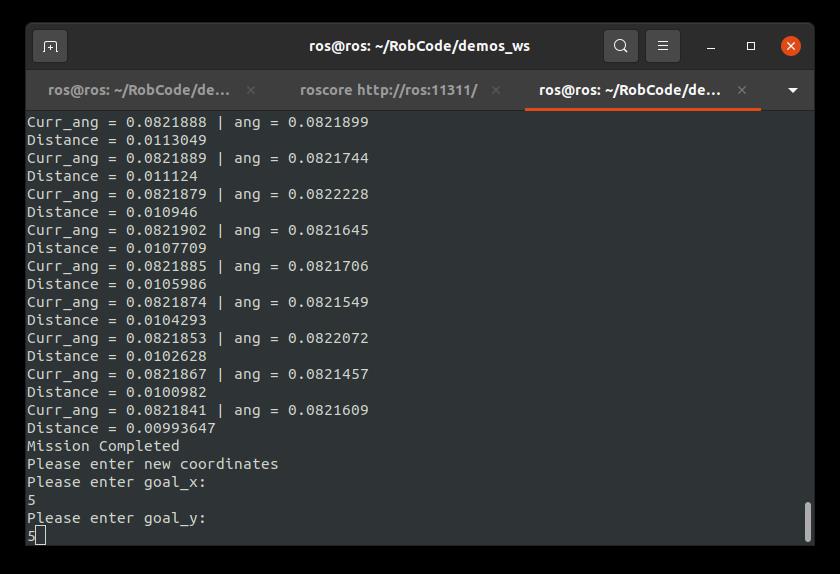
过程中的一些图:


以上是关于ROS机器人从起点到终点完成的主要内容,如果未能解决你的问题,请参考以下文章