ROS机器人从起点到终点改进
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS机器人从起点到终点改进相关的知识,希望对你有一定的参考价值。
之前一篇,算法稀烂:
能否改进一点呢?参考如下代码:
geometry_msgs::Twist vel_msg;
vel_msg.angular.z = 4.0 * atan2(transform.getOrigin().y(),
transform.getOrigin().x());
vel_msg.linear.x = 0.5 * sqrt(pow(transform.getOrigin().x(), 2) +
pow(transform.getOrigin().y(), 2));
turtle_vel.publish(vel_msg);对比:
vel_x=(goal_x-msg->x)/8.0;
vel_z=(goal_y-msg->y)/40.0;
修改:
vel_x = 1.0 * sqrt(pow((goal_x-msg->x), 2) + pow((goal_y-msg->y), 2));
vel_z = 4.0 * atan2((goal_y-msg->y), (goal_x-msg->x));
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
#include "turtlesim/Pose.h"
float goal_x=10.0,goal_y=1.5,vel_x=0,vel_z=0;
void poseCallback(const turtlesim::Pose::ConstPtr& msg)
ROS_INFO("Turtle pose: x:%0.6f, y:%0.6f", msg->x, msg->y);
vel_x = 1.0 * sqrt(pow((goal_x-msg->x), 2) + pow((goal_y-msg->y), 2));
vel_z = 4.0 * atan2((goal_y-msg->y), (goal_x-msg->x));
int main(int argc, char **argv)
ros::init(argc, argv, "pose_sub_vel_pub");
ros::NodeHandle n;
ros::Subscriber pose_sub = n.subscribe("/turtle1/pose", 10, poseCallback);
ros::Publisher turtle_vel_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 10);
ros::Rate loop_rate(10);
int count = 0;
geometry_msgs::Twist vel_msg;
vel_msg.linear.x = 0.0;
vel_msg.angular.z = 0.0;
while (ros::ok())
vel_msg.linear.x=vel_x;
vel_msg.angular.z=vel_z;
turtle_vel_pub.publish(vel_msg);
ROS_INFO("Publsh turtle velocity command[%0.2f m/s, %0.2f rad/s]",
vel_msg.linear.x, vel_msg.angular.z);
ros::spinOnce();
loop_rate.sleep();
return 0;
试一试效果如何???

惊呆了,有没有???
10.0和1.5的目标位置的确到了,但是?
最终精度还挺高的!!!
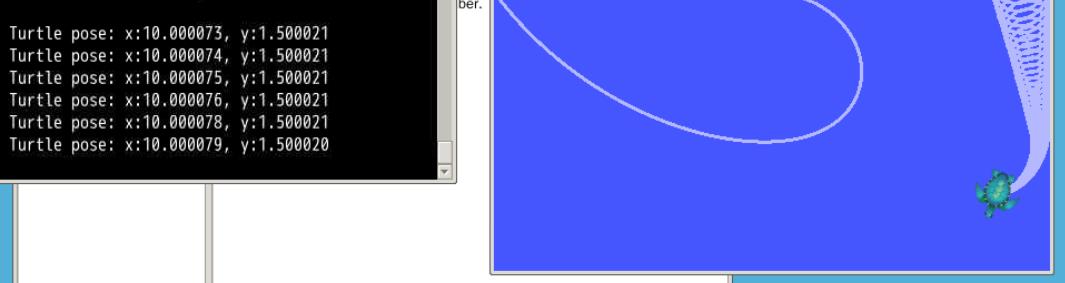
这魔幻的走位,能不能忍受?
改改参数即可。
以上是关于ROS机器人从起点到终点改进的主要内容,如果未能解决你的问题,请参考以下文章