Vscode开发ROS,实现自动补全功能
Posted loongembedded
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Vscode开发ROS,实现自动补全功能相关的知识,希望对你有一定的参考价值。
文章目录
1. 无法自动补全功能
忘记了我工作空间之前怎么操作生成.vscode文件夹的,其中的c_cpp_properties.json如下,在cpp文件中输入ros代码的时候无法自动补齐,文件内容如下:
“configurations”: [
“name”: “Linux”,
“includePath”: [
“$workspaceFolder/**”,
],
“defines”: [],
“compilerPath”: “/usr/bin/gcc”,
“cStandard”: “c17”,
“cppStandard”: “gnu++14”,
“intelliSenseMode”: “linux-gcc-x64”
],
“version”: 4
后来发现在 "includePath"下增加包含/opt/ros/noetic/include/路径即可,增加后是
"includePath": [
"$workspaceFolder/**",
"/opt/ros/noetic/include/**"
],
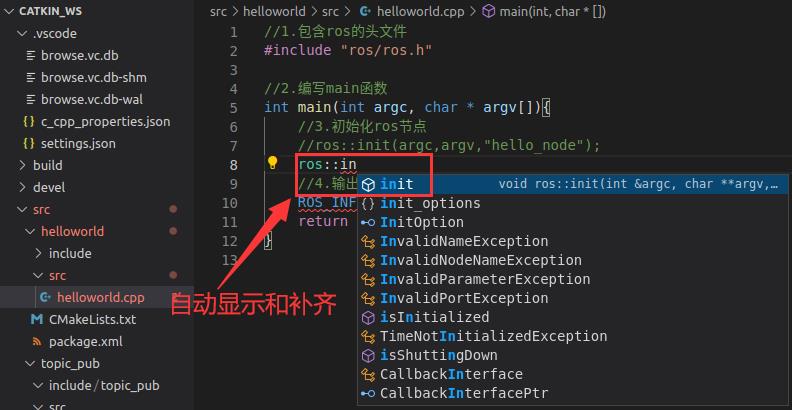
后来先关掉vscode,删掉.vscode文件夹,再用vscode打开我工作空间,自动生成.vscode文件夹,
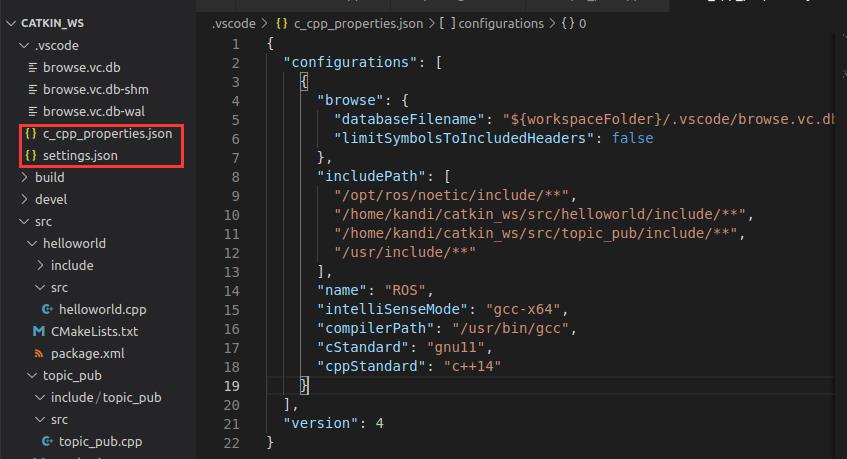
这样就可以自动补全代码,效果如下:
但此时包含c_cpp_properties.json、settings.json配置文件,还没有tasks.json文件,点击菜单栏“Terminal->Configure default build task” ,选择catkin_make:build,然后会在.vscode的文件夹出现一个task.json文件,此文件可用来配置编译命令相关,这样使用就可以快捷键 ctrl + shift + B会使用catkin_make进行编译
以上是关于Vscode开发ROS,实现自动补全功能的主要内容,如果未能解决你的问题,请参考以下文章