youcans 的 OpenCV 例程 200 篇103. 陷波带阻滤波器消除周期噪声干扰
Posted 小白YouCans
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了youcans 的 OpenCV 例程 200 篇103. 陷波带阻滤波器消除周期噪声干扰相关的知识,希望对你有一定的参考价值。
欢迎关注 『youcans 的 OpenCV 例程 200 篇』 系列,持续更新中
欢迎关注 『youcans 的 OpenCV学习课』 系列,持续更新中
【youcans 的 OpenCV 例程 200 篇】103. 陷波带阻滤波器消除周期噪声干扰
4.1 陷波滤波器(Notch Filter)
陷波滤波器阻止或通过预定的频率矩形邻域中的频率,可以很好地复原被周期性噪声干扰的图像。
陷波滤波器可以在某一个频率点迅速衰减输入信号,以达到阻碍此频率信号通过的滤波效果的滤波器。
陷波带阻滤波器的传递函数是中心平移到陷波中心的各个高通滤波器的乘积:
H
N
R
(
u
,
v
)
=
∏
k
=
1
Q
H
k
(
u
,
v
)
H
−
k
(
u
,
v
)
H_NR(u,v) = \\prod_k=1^Q H_k(u,v) H_-k(u,v)
HNR(u,v)=k=1∏QHk(u,v)H−k(u,v)
其中,滤波器的距离计算公式为:
D
k
(
u
,
v
)
=
(
u
−
M
/
2
−
u
k
)
2
+
(
v
−
N
/
2
−
v
k
)
2
D
−
k
(
u
,
v
)
=
(
u
−
M
/
2
+
u
k
)
2
+
(
v
−
N
/
2
+
v
k
)
2
D_k(u,v) = \\sqrt(u-M/2-u_k)^2 + (v-N/2-v_k)^2 \\\\ D_-k(u,v) = \\sqrt(u-M/2+u_k)^2 + (v-N/2+v_k)^2
Dk(u,v)=(u−M/2−uk)2+(v−N/2−vk)2D−k(u,v)=(u−M/2+uk)2+(v−N/2+vk)2
例如,具有 3个陷波对的 n 阶巴特沃斯陷波带阻滤波器为:
H
N
R
(
u
,
v
)
=
∏
k
=
1
3
[
1
1
+
[
D
0
k
/
D
k
(
u
,
v
)
]
n
]
[
1
1
+
[
D
−
k
/
D
k
(
u
,
v
)
]
n
]
H_NR(u,v) = \\prod_k=1^3 [\\frac11+[D_0k/D_k(u,v)]^n] [\\frac11+[D_-k/D_k(u,v)]^n]
HNR(u,v)=k=1∏3[1+[D0k/Dk(u,v)]n1][1+[D−k/Dk(u,v)]n1]
例程 9.17:陷波带阻滤波器消除周期噪声干扰
# 9.17: 陷波带阻滤波器消除周期噪声干扰
def butterworthNRFilter(img, radius=10, uk=10, vk=10, n=2): # 巴特沃斯陷波带阻滤波器
M, N = img.shape[1], img.shape[0]
u, v = np.meshgrid(np.arange(M), np.arange(N))
Dm = np.sqrt((u - M//2 - uk)**2 + (v - N//2 - vk)**2)
Dp = np.sqrt((u - M//2 + uk)**2 + (v - N//2 + vk)**2)
D0 = radius
n2 = 2 * n
kernel = (1 / (1 + (D0 / (Dm + 1e-6))**n2)) * (1 / (1 + (D0 / (Dp + 1e-6))**n2))
return kernel
# (1) 读取原始图像
img = cv2.imread("../images/Fig0505a.tif", flags=0) # flags=0 读取为灰度图像
imgFloat32 = np.float32(img) # 将图像转换成 float32
rows, cols = img.shape[:2] # 图片的高度和宽度
fig = plt.figure(figsize=(9, 6))
plt.subplot(231), plt.title("Original image"), plt.axis('off'), plt.imshow(img, cmap='gray')
# (2) 中心化, centralized 2d array f(x,y) * (-1)^(x+y)
mask = np.ones(img.shape)
mask[1::2, ::2] = -1
mask[::2, 1::2] = -1
fImage = imgFloat32 * mask # f(x,y) * (-1)^(x+y)
# (3) 快速傅里叶变换
rPadded = cv2.getOptimalDFTSize(rows) # 最优 DFT 扩充尺寸
cPadded = cv2.getOptimalDFTSize(cols) # 用于快速傅里叶变换
dftImage = np.zeros((rPadded, cPadded, 2), np.float32) # 对原始图像进行边缘扩充
dftImage[:rows, :cols, 0] = fImage # 边缘扩充,下侧和右侧补0
cv2.dft(dftImage, dftImage, cv2.DFT_COMPLEX_OUTPUT) # 快速傅里叶变换
dftAmp = cv2.magnitude(dftImage[:,:,0], dftImage[:,:,1]) # 傅里叶变换的幅度谱 (rPad, cPad)
dftAmpLog = np.log(1.0 + dftAmp) # 幅度谱对数变换,以便于显示
dftAmpNorm = np.uint8(cv2.normalize(dftAmpLog, None, 0, 255, cv2.NORM_MINMAX)) # 归一化为 [0,255]
plt.subplot(232), plt.axis('off'), plt.title("DFT spectrum")
plt.imshow(dftAmpNorm, cmap='gray')
plt.arrow(445, 370, 25, 30, width=5, length_includes_head=True, shape='full') # 在图像上加上箭头
plt.arrow(550, 490, -25, -30, width=5, length_includes_head=True, shape='full') # 在图像上加上箭头
# (4) 构建陷波带阻滤波器 传递函数
BRFilter = butterworthNRFilter(dftImage, radius=15, uk=25, vk=16, n=3) # 巴特沃斯陷波带阻滤波器, 处理周期噪声
plt.subplot(233), plt.axis('off'), plt.title("Butterworth notch resist filter")
plt.imshow(BRFilter, cmap='gray')
# (5) 在频率域修改傅里叶变换: 傅里叶变换 点乘 陷波带阻滤波器
dftFilter = np.zeros(dftImage.shape, dftImage.dtype) # 快速傅里叶变换的尺寸(优化尺寸)
for i in range(2):
dftFilter[:rPadded, :cPadded, i] = dftImage[:rPadded, :cPadded, i] * BRFilter
# 频域滤波傅里叶变换的傅里叶谱
nrfDftAmp = cv2.magnitude(dftFilter[:, :, 0], dftFilter[:, :, 1]) # 傅里叶变换的幅度谱
nrfDftAmpLog = np.log(1.0 + nrfDftAmp) # 幅度谱对数变换,以便于显示
nrfDftAmpNorm = np.uint8(cv2.normalize(nrfDftAmpLog, None, 0, 255, cv2.NORM_MINMAX)) # 归一化为 [0,255]
plt.subplot(234), plt.axis('off'), plt.title("BNRF DFT Spectrum")
plt.imshow(nrfDftAmpNorm, cmap='gray')
# (6) 对频域滤波傅里叶变换 执行傅里叶逆变换,并只取实部
idft = np.zeros(dftAmp.shape, np.float32) # 快速傅里叶变换的尺寸(优化尺寸)
cv2.dft(dftFilter, idft, cv2.DFT_REAL_OUTPUT + cv2.DFT_INVERSE + cv2.DFT_SCALE)
# (7) 中心化, centralized 2d array g(x,y) * (-1)^(x+y)
mask2 = np.ones(dftAmp.shape)
mask2[1::2, ::2] = -1
mask2[::2, 1::2] = -1
idftCen = idft * mask2 # g(x,y) * (-1)^(x+y)
plt.subplot(235), plt.axis('off'), plt.title("g(x,y)*(-1)^(x+y)")
plt.imshow(idftCen, cmap='gray')
# (8) 截取左上角,大小和输入图像相等
idftCenClip = np.clip(idftCen, 0, 255) # 截断函数,将数值限制在 [0,255]
imgFiltered = idftCenClip.astype(np.uint8)
imgFiltered = imgFiltered[:rows, :cols]
plt.subplot(236), plt.axis('off'), plt.title("BNRF filtered image")
plt.imshow(imgFiltered, cmap='gray')
plt.tight_layout()
plt.show()
print("image.shape:".format(img.shape))
print("imgFloat32.shape:".format(imgFloat32.shape))
print("dftImage.shape:".format(dftImage.shape))
print("dftAmp.shape:".format(dftAmp.shape))
print("idft.shape:".format(idft.shape))
print("dftFilter.shape:".format(dftFilter.shape))
print("imgFiltered.shape:".format(imgFiltered.shape))
程序说明:
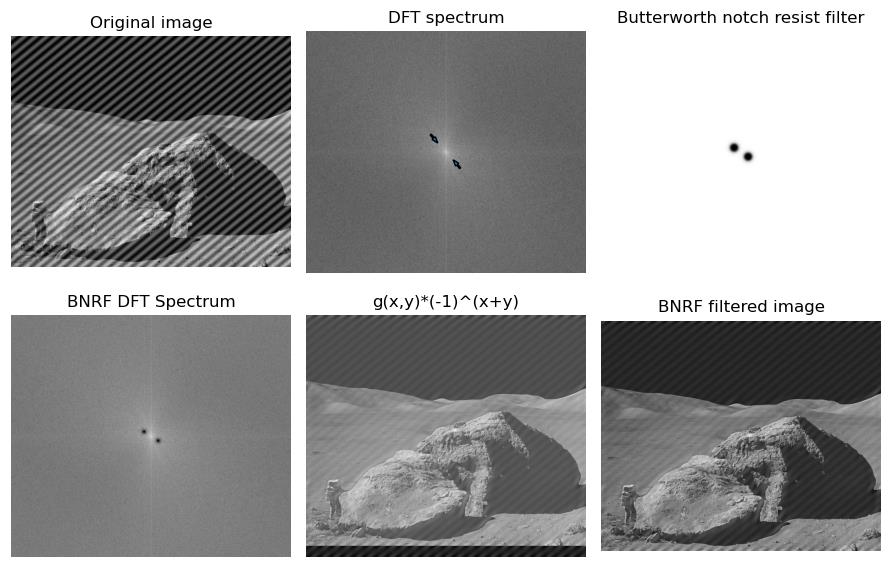
傅立叶变换的频谱反映能量分布。通过中心化移频到原点以后,傅里叶变换的频谱图是以原点为中心对称分布的。中心化不仅可以清晰地看出图像频率分布,还可以分离出有周期性规律的干扰信号。
本例程中的图像受到正弦噪声的干扰,从中心化的频谱图可以看出,除原点以外还存在一对对称分布的亮点(箭头指示处),这就干扰噪声产生的。因此,在该亮点位置设计陷波带阻滤波器,可以消除干扰正弦噪声。
(本节完)
版权声明:
youcans@xupt 原创作品,转载必须标注原文链接
Copyright 2021 youcans, XUPT
Crated:2022-2-10
欢迎关注 『youcans 的 OpenCV 例程 200 篇』 系列,持续更新中
欢迎关注 『youcans 的 OpenCV学习课』 系列,持续更新中【youcans 的 OpenCV 例程200篇】01. 图像的读取(cv2.imread)
【youcans 的 OpenCV 例程200篇】02. 图像的保存(cv2.imwrite)
【youcans 的 OpenCV 例程200篇】03. 图像的显示(cv2.imshow)
【youcans 的 OpenCV 例程200篇】04. 用 matplotlib 显示图像(plt.imshow)<以上是关于youcans 的 OpenCV 例程 200 篇103. 陷波带阻滤波器消除周期噪声干扰的主要内容,如果未能解决你的问题,请参考以下文章
youcans 的 OpenCV 例程200篇182.基于形态学梯度的分水岭算法
youcans 的 OpenCV 例程200篇179.图像分割之 GrabCut 图割法(掩模图像)