基于密度的聚类方法
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了基于密度的聚类方法相关的知识,希望对你有一定的参考价值。
参考技术A 基于密度的聚类方法的主要目标是寻找被低密度区域分离的高密度区域。与基于距离的聚类算法不同的是,基于距离的聚类算法的聚类结果是球状的簇,而基于密度的聚类算法可以发现任意形状的簇。
基于密度的聚类方法是从数据对象分布区域的密度着手的。如果给定类中的数据对象在给定的范围区域中,则数据对象的密度超过某一阈值就继续聚类。
这种方法通过连接密度较大的区域,能够形成不同形状的簇,而且可以消除孤立点和噪声对聚类质量的影响,以及发现任意形状的簇。基于密度的聚类方法中最具代表性的是DBSAN算法、OPTICS算法和DENCLUE算法。
DBSCAN
[+]最近在Science上的一篇基于密度的聚类算法《Clustering by fast search and find of density peaks》引起了大家的关注(在我的博文“论文中的机器学习算法——基于密度峰值的聚类算法”中也进行了中文的描述)。于是我就想了解下基于密度的聚类算法,熟悉下基于密度的聚类算法与基于距离的聚类算法,如K-Means算法之间的区别。
基于密度的聚类算法主要的目标是寻找被低密度区域分离的高密度区域。与基于距离的聚类算法不同的是,基于距离的聚类算法的聚类结果是球状的簇,而基于密度的聚类算法可以发现任意形状的聚类,这对于带有噪音点的数据起着重要的作用。
DBSCAN(Density-Based Spatial Clustering of Application with Noise)是一种典型的基于密度的聚类算法,在DBSCAN算法中将数据点分为一下三类:
- 核心点。在半径Eps内含有超过MinPts数目的点
- 边界点。在半径Eps内点的数量小于MinPts,但是落在核心点的邻域内
- 噪音点。既不是核心点也不是边界点的点
在这里有两个量,一个是半径Eps,另一个是指定的数目MinPts。
一些其他的概念
- Eps邻域。简单来讲就是与点
 的距离小于等于Eps的所有的点的集合,可以表示为
的距离小于等于Eps的所有的点的集合,可以表示为") 。
。 - 直接密度可达。如果在核心对象
 的Eps邻域内,则称对象从对象出发是直接密度可达的。
的Eps邻域内,则称对象从对象出发是直接密度可达的。 - 密度可达。对于对象链:
,
是从
关于Eps和MinPts直接密度可达的,则对象
是从对象
关于Eps和MinPts密度可达的。

(流程)
在实验中使用了两个测试数据集,数据集的原始图像如下:

(数据集1)
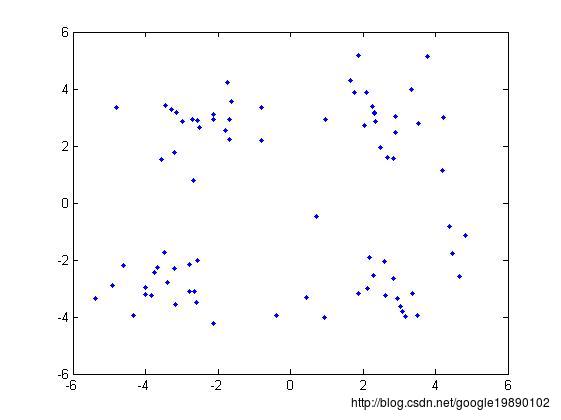
(数据集2)
数据集1相对比较简单。显然我们可以发现数据集1共有两个类,数据集2有四个类,下面我们通过DBSCAN算法实现数据点的聚类:
MATLAB代码
主程序
[plain] view plain copy


- %% DBSCAN
- clear all;
- clc;
- %% 导入数据集
- % data = load('testData.txt');
- data = load('testData_2.txt');
- % 定义参数Eps和MinPts
- MinPts = 5;
- Eps = epsilon(data, MinPts);
- [m,n] = size(data);%得到数据的大小
- x = [(1:m)' data];
- [m,n] = size(x);%重新计算数据集的大小
- types = zeros(1,m);%用于区分核心点1,边界点0和噪音点-1
- dealed = zeros(m,1);%用于判断该点是否处理过,0表示未处理过
- dis = calDistance(x(:,2:n));
- number = 1;%用于标记类
- %% 对每一个点进行处理
- for i = 1:m
- %找到未处理的点
- if dealed(i) == 0
- xTemp = x(i,:);
- D = dis(i,:);%取得第i个点到其他所有点的距离
- ind = find(D<=Eps);%找到半径Eps内的所有点
- %% 区分点的类型
- %边界点
- if length(ind) > 1 && length(ind) < MinPts+1
- types(i) = 0;
- class(i) = 0;
- end
- %噪音点
- if length(ind) == 1
- types(i) = -1;
- class(i) = -1;
- dealed(i) = 1;
- end
- %核心点(此处是关键步骤)
- if length(ind) >= MinPts+1
- types(xTemp(1,1)) = 1;
- class(ind) = number;
- % 判断核心点是否密度可达
- while ~isempty(ind)
- yTemp = x(ind(1),:);
- dealed(ind(1)) = 1;
- ind(1) = [];
- D = dis(yTemp(1,1),:);%找到与ind(1)之间的距离
- ind_1 = find(D<=Eps);
- if length(ind_1)>1%处理非噪音点
- class(ind_1) = number;
- if length(ind_1) >= MinPts+1
- types(yTemp(1,1)) = 1;
- else
- types(yTemp(1,1)) = 0;
- end
- for j=1:length(ind_1)
- if dealed(ind_1(j)) == 0
- dealed(ind_1(j)) = 1;
- ind=[ind ind_1(j)];
- class(ind_1(j))=number;
- end
- end
- end
- end
- number = number + 1;
- end
- end
- end
- % 最后处理所有未分类的点为噪音点
- ind_2 = find(class==0);
- class(ind_2) = -1;
- types(ind_2) = -1;
- %% 画出最终的聚类图
- hold on
- for i = 1:m
- if class(i) == -1
- plot(data(i,1),data(i,2),'.r');
- elseif class(i) == 1
- if types(i) == 1
- plot(data(i,1),data(i,2),'+b');
- else
- plot(data(i,1),data(i,2),'.b');
- end
- elseif class(i) == 2
- if types(i) == 1
- plot(data(i,1),data(i,2),'+g');
- else
- plot(data(i,1),data(i,2),'.g');
- end
- elseif class(i) == 3
- if types(i) == 1
- plot(data(i,1),data(i,2),'+c');
- else
- plot(data(i,1),data(i,2),'.c');
- end
- else
- if types(i) == 1
- plot(data(i,1),data(i,2),'+k');
- else
- plot(data(i,1),data(i,2),'.k');
- end
- end
- end
- hold off

%% DBSCANclear all;clc;%% 导入数据集% data = load('testData.txt');data = load('testData_2.txt');% 定义参数Eps和MinPtsMinPts = 5;Eps = epsilon(data, MinPts);[m,n] = size(data);%得到数据的大小x = [(1:m)' data];[m,n] = size(x);%重新计算数据集的大小types = zeros(1,m);%用于区分核心点1,边界点0和噪音点-1dealed = zeros(m,1);%用于判断该点是否处理过,0表示未处理过dis = calDistance(x(:,2:n));number = 1;%用于标记类%% 对每一个点进行处理for i = 1:m %找到未处理的点 if dealed(i) == 0 xTemp = x(i,:); D = dis(i,:);%取得第i个点到其他所有点的距离 ind = find(D<=Eps);%找到半径Eps内的所有点 %% 区分点的类型 %边界点 if length(ind) > 1 && length(ind) < MinPts+1 types(i) = 0; class(i) = 0; end %噪音点 if length(ind) == 1 types(i) = -1; class(i) = -1; dealed(i) = 1; end %核心点(此处是关键步骤) if length(ind) >= MinPts+1 types(xTemp(1,1)) = 1; class(ind) = number; % 判断核心点是否密度可达 while ~isempty(ind) yTemp = x(ind(1),:); dealed(ind(1)) = 1; ind(1) = []; D = dis(yTemp(1,1),:);%找到与ind(1)之间的距离 ind_1 = find(D<=Eps); if length(ind_1)>1%处理非噪音点 class(ind_1) = number; if length(ind_1) >= MinPts+1 types(yTemp(1,1)) = 1; else types(yTemp(1,1)) = 0; end for j=1:length(ind_1) if dealed(ind_1(j)) == 0 dealed(ind_1(j)) = 1; ind=[ind ind_1(j)]; class(ind_1(j))=number; end end end end number = number + 1; end endend% 最后处理所有未分类的点为噪音点ind_2 = find(class==0);class(ind_2) = -1;types(ind_2) = -1;%% 画出最终的聚类图hold onfor i = 1:m if class(i) == -1 plot(data(i,1),data(i,2),'.r'); elseif class(i) == 1 if types(i) == 1 plot(data(i,1),data(i,2),'+b'); else plot(data(i,1),data(i,2),'.b'); end elseif class(i) == 2 if types(i) == 1 plot(data(i,1),data(i,2),'+g'); else plot(data(i,1),data(i,2),'.g'); end elseif class(i) == 3 if types(i) == 1 plot(data(i,1),data(i,2),'+c'); else plot(data(i,1),data(i,2),'.c'); end else if types(i) == 1 plot(data(i,1),data(i,2),'+k'); else plot(data(i,1),data(i,2),'.k'); end endendhold off
距离计算函数
[plain] view plain copy
- %% 计算矩阵中点与点之间的距离
- function [ dis ] = calDistance( x )
- [m,n] = size(x);
- dis = zeros(m,m);
- for i = 1:m
- for j = i:m
- %计算点i和点j之间的欧式距离
- tmp =0;
- for k = 1:n
- tmp = tmp+(x(i,k)-x(j,k)).^2;
- end
- dis(i,j) = sqrt(tmp);
- dis(j,i) = dis(i,j);
- end
- end
- end
%% 计算矩阵中点与点之间的距离function [ dis ] = calDistance( x ) [m,n] = size(x); dis = zeros(m,m); for i = 1:m for j = i:m %计算点i和点j之间的欧式距离 tmp =0; for k = 1:n tmp = tmp+(x(i,k)-x(j,k)).^2; end dis(i,j) = sqrt(tmp); dis(j,i) = dis(i,j); end endend
epsilon函数
[plain] view plain copy
- function [Eps]=epsilon(x,k)
- % Function: [Eps]=epsilon(x,k)
- %
- % Aim:
- % Analytical way of estimating neighborhood radius for DBSCAN
- %
- % Input:
- % x - data matrix (m,n); m-objects, n-variables
- % k - number of objects in a neighborhood of an object
- % (minimal number of objects considered as a cluster)
- [m,n]=size(x);
- Eps=((prod(max(x)-min(x))*k*gamma(.5*n+1))/(m*sqrt(pi.^n))).^(1/n);
function [Eps]=epsilon(x,k)% Function: [Eps]=epsilon(x,k)%% Aim: % Analytical way of estimating neighborhood radius for DBSCAN%% Input: % x - data matrix (m,n); m-objects, n-variables% k - number of objects in a neighborhood of an object% (minimal number of objects considered as a cluster)[m,n]=size(x);Eps=((prod(max(x)-min(x))*k*gamma(.5*n+1))/(m*sqrt(pi.^n))).^(1/n);
最终的结果
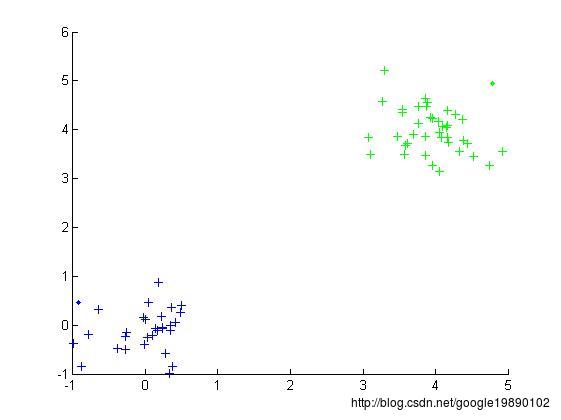
(数据集1的聚类结果)
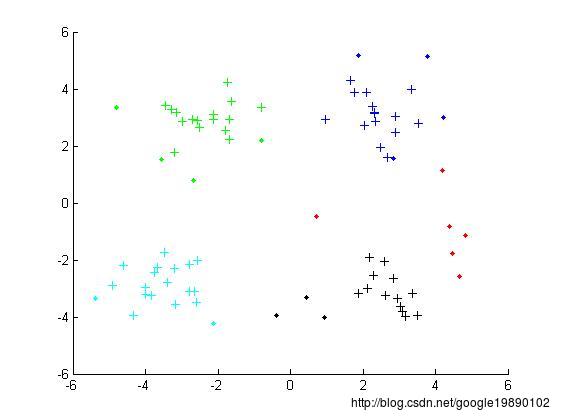
(数据集2的聚类结果)
在上面的结果中,红色的点代表的是噪音点,点代表的是边界点,十字代表的是核心点。不同的颜色代表着不同的类。
[1] M. Ester, H. Kriegel, J. Sander, X. Xu, A density-based algorithm for discovering clusters in large spatial databases with noise, www.dbs.informatik.uni-muenchen.de/cgi-bin/papers?query=--CO
[2] M. Daszykowski, B. Walczak, D. L. Massart, Looking for Natural Patterns in Data. Part 1: Density Based Approach
来源:http://blog.csdn.net/google19890102/article/details/37656733
以上是关于基于密度的聚类方法的主要内容,如果未能解决你的问题,请参考以下文章
聚类:层次聚类基于划分的聚类(k-means)基于密度的聚类基于模型的聚类
机器学习DBSCAN Algorithms基于密度的聚类算法