PyTorch笔记 - Convolution卷积运算的原理
Posted SpikeKing
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了PyTorch笔记 - Convolution卷积运算的原理相关的知识,希望对你有一定的参考价值。
Convolution:
-
元素:input size、kernel size、stride、padding、group、dilation(膨胀)
-
计算方法:F.conv2d、input展开+矩阵相乘、kernel展开+矩阵相乘
-
用途:局部建模、下采样
-
卷积与互相关
Transpose Convolution:
- 计算方法:
F.conv_transpose2d、kernel转置+矩阵相乘 - 用途:上采样
PyTorch Conv2D:
Conv2D的参数:
in_channels(输入通道),out_channels(输出通道),kernel_size(卷积核)stride=1(步长),padding=0(填充),dilation=1(膨胀)
卷积和信号互相关类似,对于一张图像,卷积核沿着图像的不同区域,滑动相乘
Input Feature Map,特征图,4x4
Kernel,卷积核,3x3
stride=1,padding=0
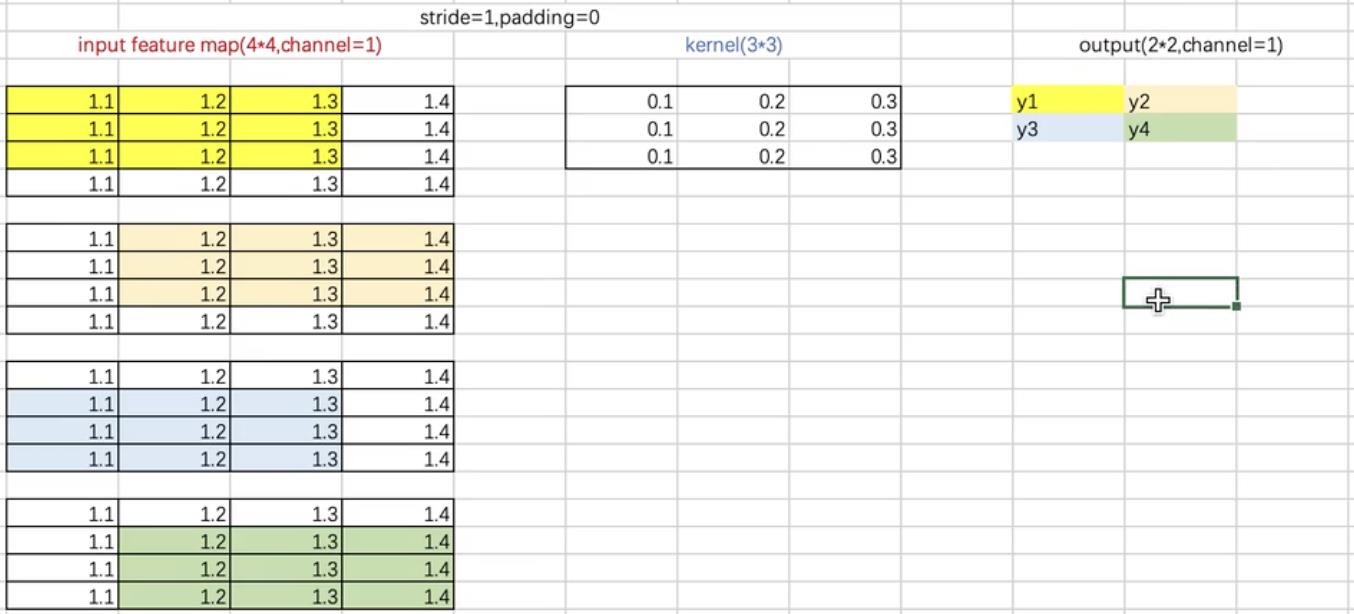
Z字型移动,从左到右,从上到下
bias是标量,卷积之后的再加上标量
二维卷积源码:
import torch
import torch.nn as nn
import torch.nn.functional as F
in_channels = 1
out_channels = 1
kernel_size = 3 # 可以是标量,也可以是元组
batch_size = 1
bias = False
input_size = (batch_size, in_channels, 4, 4) # 卷积的输入是4维,需要batch_size
# 初始化卷积
conv_layer = torch.nn.Conv2d(in_channels, out_channels, kernel_size, bias=bias)
# 卷积输入
input_feature_map = torch.randn(input_size)
# 卷积操作
output_feature_map = conv_layer(input_feature_map)
print(f'[Info] input_feature_map: \\ninput_feature_map') # 1x1x4x4
print(f'[Info] conv_layer.weight(kernel): \\nconv_layer.weight') # 1x1x3x3
print(f'[Info] output_feature_map: \\noutput_feature_map') # 1x1x2x2
# 输出公式: O=(I-K+2P)/S+1
output_feature_map_ = F.conv2d(input_feature_map, conv_layer.weight)
# F.conv2d和conv_layer的区别,在于传入kernel
print(f'[Info] output_feature_map_: \\noutput_feature_map_') # 1x1x2x2
以上是关于PyTorch笔记 - Convolution卷积运算的原理的主要内容,如果未能解决你的问题,请参考以下文章
PyTorch笔记 - Convolution卷积运算的原理
PyTorch笔记 - Convolution卷积运算的原理
PyTorch笔记 - Convolution卷积运算的原理
PyTorch笔记 - Convolution卷积运算的原理