如何通俗地解释 PID 参数整定?
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了如何通俗地解释 PID 参数整定?相关的知识,希望对你有一定的参考价值。
参考技术A解释 PID 参数整定,就有点麻烦了,如何通俗地讲呢,是个好问题
PID的原理是利用误差消除误差。三个系数P(比例),I(积分),D(微分)分别对应误差的现在,过去,和将来。从这个角度去想每个参数的影响效果会形象一点。
首先PID的原理是什么
PID的话,它的原理就是上面说的那样,是利用误差来消除它存在的误差,这里面它包含着三个系数,P代表着比例,I代表着积分,D则是微分,他们三个分别对应这误差的现在,过去和未来,这样解释的话,其实就能通俗一些了,你就能很好理解一些了,不过这是对于专业的人士来说。
怎么通俗的解释呢?
再通俗一些的话,就要这么去理解了,首先p是矫正,是需要根据当前的误差修正行为。所以这也对应刚刚说的那个,是可以通过你目前产生的误差,进行大概率的修正,同样的i 是学习,根据过去的经验找到优解。这是根据过去的错误来找到最好的解决办法,而d呢,就是预测,根据未来的趋势做出调整,在未来,出来什么问题可以通过目前的趋势来解决,因为趋势可以大概判定你要做的是什么。你的结果是什么。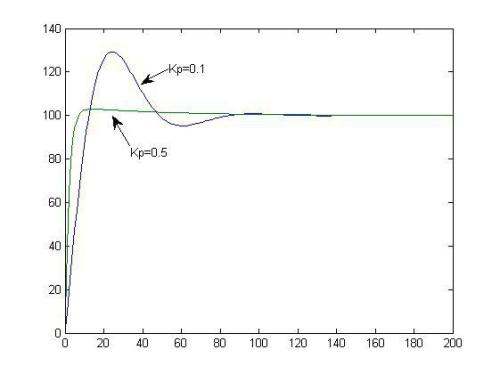
所以PID呢,是一个很多时候可以解释得非常高大上的东西
以上是关于如何通俗地解释 PID 参数整定?的主要内容,如果未能解决你的问题,请参考以下文章