图形处理点云重建(上)点云滤波尖锐特征边增采样移除离群点
Posted hjimce
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了图形处理点云重建(上)点云滤波尖锐特征边增采样移除离群点相关的知识,希望对你有一定的参考价值。
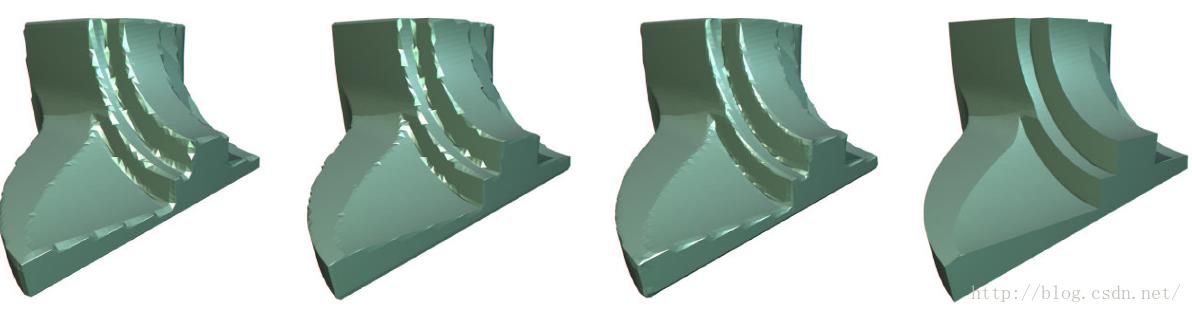
之前帮导师搞过一个项目,涉及点云尖锐的特征边重建技术,很多文献看起来效果很好,然而都是坑爹的算法,鲁邦性很差,比如这篇paper《Feature Sensitive Surface Extraction from Volume Data》把我坑的好惨,网上没有提供源代码,最主要的是这篇paper的引用率貌似还可以,于是我花了一周的时间,终于把代码写出来了,结果效果鲁棒性好差。下面的图,就是那篇paper的坑爹图,最后一张看起来,尖锐特征边的重建效果,真不是一般的好,坑害了多少菜鸟。
点云的尖锐特征边重建,有一些文献,如《Dual Marching Cubes: Primal Contouring of Dual Grids》、《Cubical Marching Squares: Adaptive Feature Preserving Surface Extraction from Volume Data》、《Feature Preserving Point Set Surfaces based on Non-Linear Kernel Regression》,然而搞了一个月,最后我感觉这些paper都不靠谱。
最后我是用了,在预处理阶段,进行特征边点云的增采样,才勉强把特征边重建出比较好的结果。我们知道,对于点云的重建,其实最关键的还是对点云的滤波,法矢求取等步骤,因此预处理对点云重建至关重要。最后我的预处理算法,主要是参考了paper的特征边增采样技术。
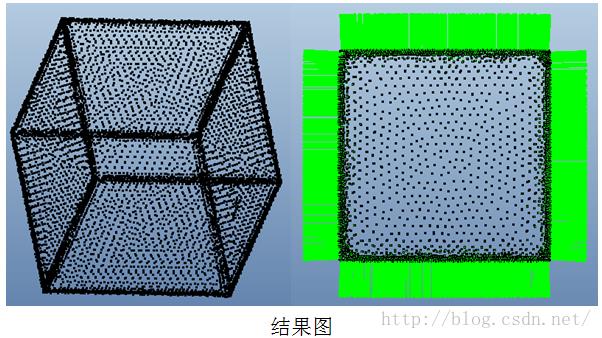
下面我以正方体点云模型的重建为示例,讲解算法如何,重建出正方体模型的特征边流程。
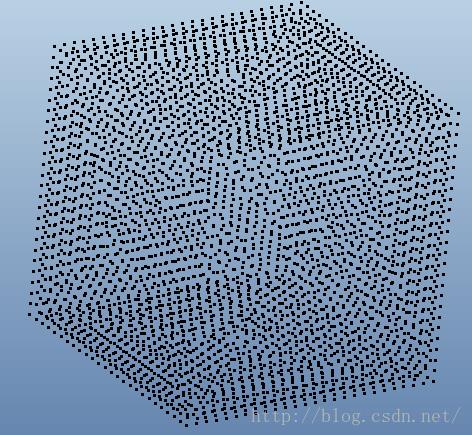

正方体点云模型(普通视图、前视图)
主要算法参考文献为《Edge-Aware Point Set Resampling》,算法具体流程如下:
①法矢初步估算
这一步主要是使用了加权的PCA算法,PCA算法是点云法矢计算的常用算法。
a.均匀权的pi点法矢计算公式为:
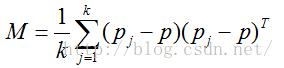
其中pj为p点的k近邻。然后通过求解协方差矩阵M的最小特征值的特征向量,作为p点的法向量,这就是所谓的主元分析方法PCA
b.基于高斯权重的主元分析方法:
原来的方法,采用的是均匀权重的方法(1/k),把均匀权改为高斯权:
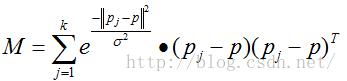
通过求解M的最小特征值的特征向量,获得p点的法向量,其中参数σ可以选择跟点云密度相关的参数。看一下我用两个不同的权的计算结果的区别:
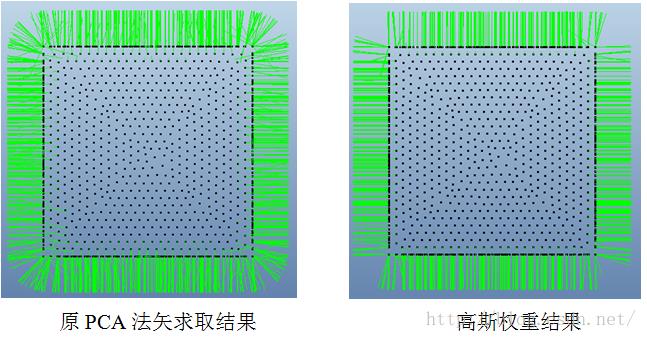
由以上结果可知,采用高斯权重,对于正方体的尖锐特征边的法矢求取显然效果好很多。因为法矢的求取好坏直接决定了三维点云重建的效果好坏的关键。因此我们选用高斯权重进行PCA法矢求取。
② bilateral normal smoothing(法矢平滑)
这一步是通过双边滤波的方法进行异向法矢平滑,因为仅仅靠第一步的算法,鲁棒性还不够,因此paper《Edge-Aware Point Set Resampling》接着又进行了异向法矢平滑。通过①我们可计算得每个点的初步法矢,接着根据下面公式进行迭代,可获得平滑后的法矢,p点法矢的迭代公式为:
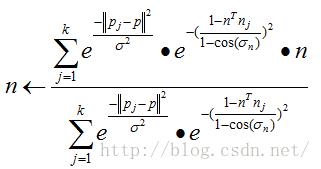
同样的pj为p点的k近邻。其中,参数σ可以选择跟点云密度相关的参数,σn为角度阈值(默认选择15°),迭代次数选择2~5次合适(默认选择迭代2次,效果还不错),最后法矢异性滤波结果如下:
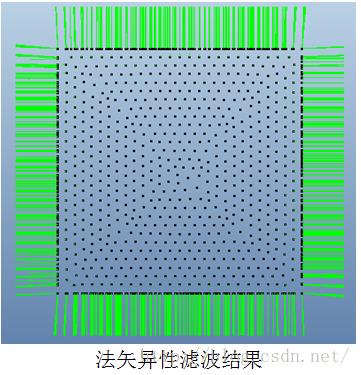
由结果可知,相比于第一步的结果,我们的法矢求取效果又提升了不少,这是点云重建预处理的关键一步。
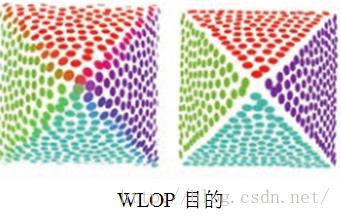
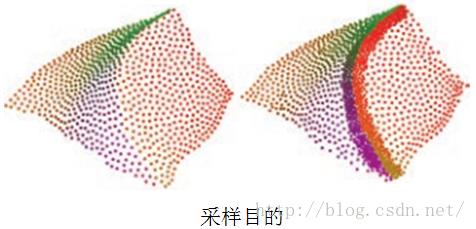
③异向优化投影WLOP
上面那一步是对点云的法矢进行保特征滤波,这一步的目的是对点云进行保边缘滤波。文献的作者选择了WLOP算法,进行点云滤波去噪。这一步不仅可以实现去噪,同时可实现把特征边上的点位置调整,使靠近特征边的点远离特征边,如下图所示:
异向WLOP滤波算法,迭代公式为:
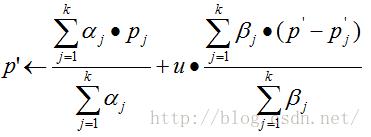
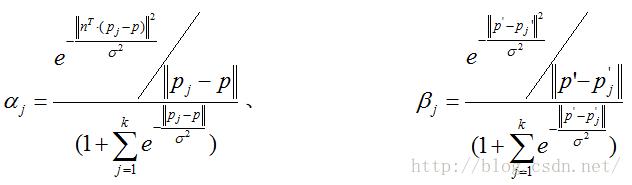
其中,u为常数(默认选择0.45),其中p表示最原始的点云位置,p’表示迭代后新位置,k为邻接顶点的个数(默认选择16)。、分别为相关的权值系数,其计算公式如下:
OK,接着看一下我用这个算法接着进行点云滤波的结果图:
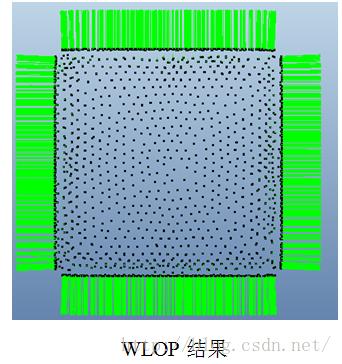
是不是感觉滤波后,效果又更上一层楼了,进行WLOP滤波后,特征边的地方点云的密度会大大减小,因此接着paper提出了文献的创新点,特征边曾采样技术。
④resampling(特征区域采样)
实现对特征边密集采样,因为增采样是人为插值的点,所以自然其法矢的求取效果很OK,增采样如图所示:
其中算法采样点算法如下
a、定义点云顶点pi的计算公式为(b为三维点):

其中pi’为pi点的邻接顶点,n为对应的法矢;
b、遍历
其中ni为当前点的法矢,ni'表示当前点邻接顶点的法矢,NSi为当前点的邻接顶点集合,ρ为常数,ρ的取值对结果的影响如下图所示,我的算法实现默认取ρ=4。
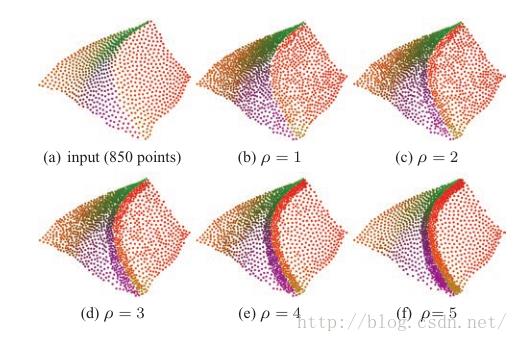
看下正方体特征边增采样的结果图:
⑤泊松重建
预处理结束后,接着就是进行点云到三角网格曲面的重建了,重建过程我选用了泊松重建算法实现的,最后的重建效果如下图所示:
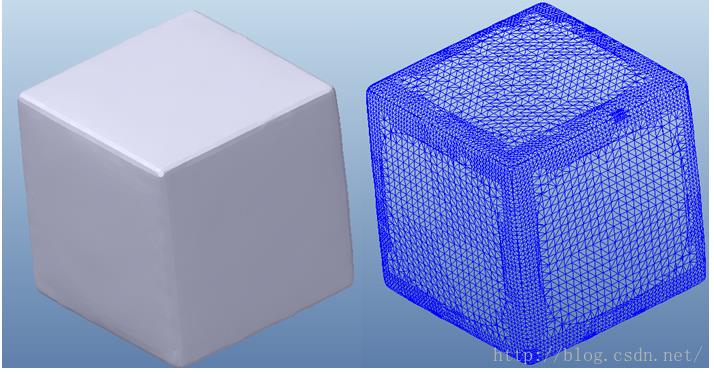
OK,至此完成点云重建,对于尖锐特征边的重建,paper有一些,效果看起来相当棒,但是千万不要被忽悠,因为大部分是坑爹的效果图。上面这种算法,通过特征边增采样的方法进行重建,效果鲁棒性还不错。
本文地址:http://blog.csdn.net/hjimce/article/details/46415909 作者:hjimce 联系qq:1393852684 更多资源请关注我的博客:http://blog.csdn.net/hjimce 原创文章,转载请保留本行信息。
以上是关于图形处理点云重建(上)点云滤波尖锐特征边增采样移除离群点的主要内容,如果未能解决你的问题,请参考以下文章