点云处理技术之PCL滤波器——体素滤波器(pcl::VoxelGrid)
Posted 非晚非晚
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了点云处理技术之PCL滤波器——体素滤波器(pcl::VoxelGrid)相关的知识,希望对你有一定的参考价值。
体素滤波器是一种下采样的滤波器,它的作用是使用体素化方法减少点云数量,采用体素格中接近中心点的点替代体素内的所有点云,这种方法比直接使用中心点要慢,但是更加精确。这种方式即减少点云数据,并同时保存点云的形状特征,在提高配准,曲面重建,形状识别等算法速度中非常实用。
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/filters/voxel_grid.h>
int main(int argc, char **argv)
pcl::PCLPointCloud2::Ptr cloud(new pcl::PCLPointCloud2());
pcl::PCLPointCloud2::Ptr cloud_filtered(new pcl::PCLPointCloud2());
// Fill in the cloud data
pcl::PCDReader reader;
reader.read("../../pcd/rabbit.pcd", *cloud); // 读取pcd文件,相对路径(相对于可执行文件的位置)
std::cerr << "PointCloud before filtering: " << cloud->width * cloud->height
<< " data points (" << pcl::getFieldsList(*cloud) << ")." << std::endl;
// Create the filtering object
//设置体素滤波器
pcl::VoxelGrid<pcl::PCLPointCloud2> sor;
sor.setInputCloud(cloud); //输入点云
sor.setLeafSize(0.5f, 0.5f, 0.5f); //体素滤波器,单位m
sor.filter(*cloud_filtered); //滤波后的点云
std::cerr << "PointCloud after filtering: " << cloud_filtered->width * cloud_filtered->height
<< " data points (" << pcl::getFieldsList(*cloud_filtered) << ")." << std::endl;
pcl::PCDWriter writer; //保存pcd文件
writer.write("../../pcd/rabbit_downsampled.pcd", *cloud_filtered,
Eigen::Vector4f::Zero(), Eigen::Quaternionf::Identity(), false);
return (0);
输出结果:
PointCloud before filtering: 35947 data points (x y z).
PointCloud after filtering: 3056 data points (x y z).
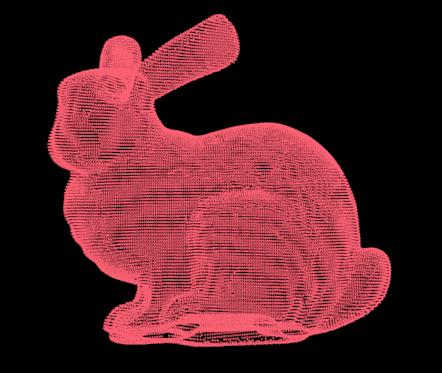
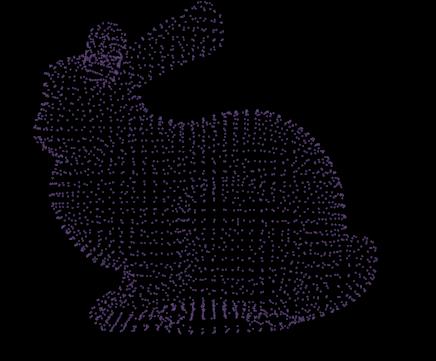
可以使用pcl_viewer查看原图和体素滤波之后的效果,从输出结果和图片对比,都可以看出点云数量明显变少,但是轮廓没有发生改变。
原图效果:
体素滤波下采样效果图:
参考:https://pcl.readthedocs.io/projects/tutorials/en/latest/voxel_grid.html#voxelgrid
以上是关于点云处理技术之PCL滤波器——体素滤波器(pcl::VoxelGrid)的主要内容,如果未能解决你的问题,请参考以下文章