深度学习SSD算法
Posted 赵广陆
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了深度学习SSD算法相关的知识,希望对你有一定的参考价值。
目录
1 SSD网络结构
SSD是YOLO V1出来后,YOLO V2出来前的一款One-stage目标检测器。SSD用到了多尺度的特征图,在之后的YOLO V3的darknet53中,也是用到了多尺度特征图的思想。较浅层的特征图上,每个cell的感受野不是很大,所以适合检测较小的物体,而在较深的特征图上,每个cell的感受野就比较大了,适合检测较大的物体。
目标检测算法主要分为两类:
- Two-stage方法:如R-CNN系列算法,主要思路就是通过Selective Search或者CNN网络产生一系列的稀疏矩阵的候选区域,然后对这些候选区域进行分类和回归,two-stage的方法优势在于准确率度高;
- One-stage方法:如YOLO系列方法,主要思路就是均匀地在图片上不同位置进行密集采样,采样时使用不同尺度和长宽比box,然后利用CNN提取特征后直接进行分类和回归,整个过程只需要一步,所以优势在于速度快。我们接下来介绍的SSD方法也是单阶段的算法。

SSD算法的全名是Single Shot MultiBox Detector,Single shot指明了SSD算法属于one-stage方法,MultiBox指明了SSD是多框预测。对于Faster R-CNN,先通过CNN得到候选框,然后进行分类和回归,而YOLO和SSD可以一步完成检测,SSD的特点是:
- SSD提取了不同尺度的特征图来做检测,大尺度特征图可以用来检测小物体,而小特征图用来检测大物体;
- SSD采用了不同尺度和长宽比的先验框,在faster r-cnn和yoloV2,V3中称为Anchors。
SSD采用VGG16作为基础模型,然后在VGG16的基础上新增了卷积层来获得更多的特征图以用于检测。如下图所示:

整个特征图分为三部分:
- backbone: VGGnet用于图片特征提取的网络
- Extra: 用于引出多尺度特征图的网络
- Loc和cls: 用于框位置回归和目标分类的网络
1.1 backbone
网络采用VGG16作为基础模型,使用imagenet数据进行预训练后,将conv4-1前一层的maxpooling中池化模式padding改为same(图中对应pytorch中的ceil_mode),使得输出为38x38,Conv4-3就是多尺度特征中的第一个38x38的特征图,因为该层比较靠前,所以在其后面增加了一个L2 Normalization层,对每个像素点在channle维度做归一化。VGG16最后的两个全连接层转换成 3x3 卷积层 conv6和 卷积层conv7,同时将最后的池化层由原来的stride=2的 2x2 变成stride=1的 3x3的池化层。

其中conv6使用的Dilated Convolutions,可以翻译为扩张卷积或空洞卷积。与普通的卷积相比,增加了一个扩张率(dilation rate)参数,主要用来表示扩张的大小。扩张卷积与普通卷积的相同点在于,卷积核的大小是一样的,在神经网络中参数数量不变,区别在于扩张卷积具有更大的感受野。如下图所示:

(a) 普通卷积,1-dilated convolution,卷积核的感受野为3×3=93×3=9。 (b) 扩张卷积,2-dilated convolution,卷积核的感受野为7×7=497×7=49。 © 扩张卷积,4-dilated convolution,卷积核的感受野为15×15=22515×15=225。
扩张卷积的感受野的计算方法是:

在tensorflow中实现使用的是:(与普通卷积不同的是指定dilation_rate即可)
layers.Conv2D(1024, 3, padding='same',dilation_rate=6, activation='relu'),
1
从上图中可以看出,卷积核的参数个数保持不变,感受野的大小随着“dilation rate”参数的增加呈指数增长。
1.2 extra部分
为了进行后续的多尺度特征提取,在Backbone后面添加了卷积网络,如下图所示:
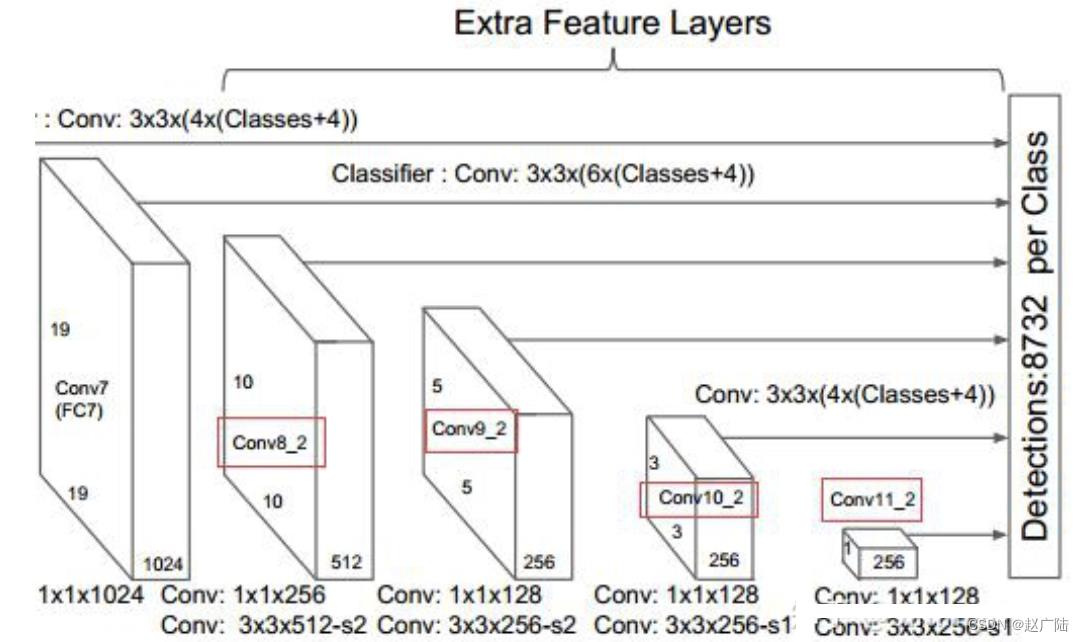
新增的Conv8_2,Conv9_2,Conv10_2,Conv11_2提取用于检测的特征图,特征图的大小如下表所示:

红框中的内容是进行多尺度分析的特征图,在加上backbone部分的Conv4_3和Conv7获取的特征图,共提取了6个特征图,其大小分别是 (38, 38), (19, 19), (10, 10), (5, 5), (3, 3), (1, 1),我们将其送入到loc和cls中进行目标检测。
1.3 loc和cls
在backbone和 Extras 在提取的6个特征图的基础上,进行位置信息和分类信息的提取,其结构如下图所示:
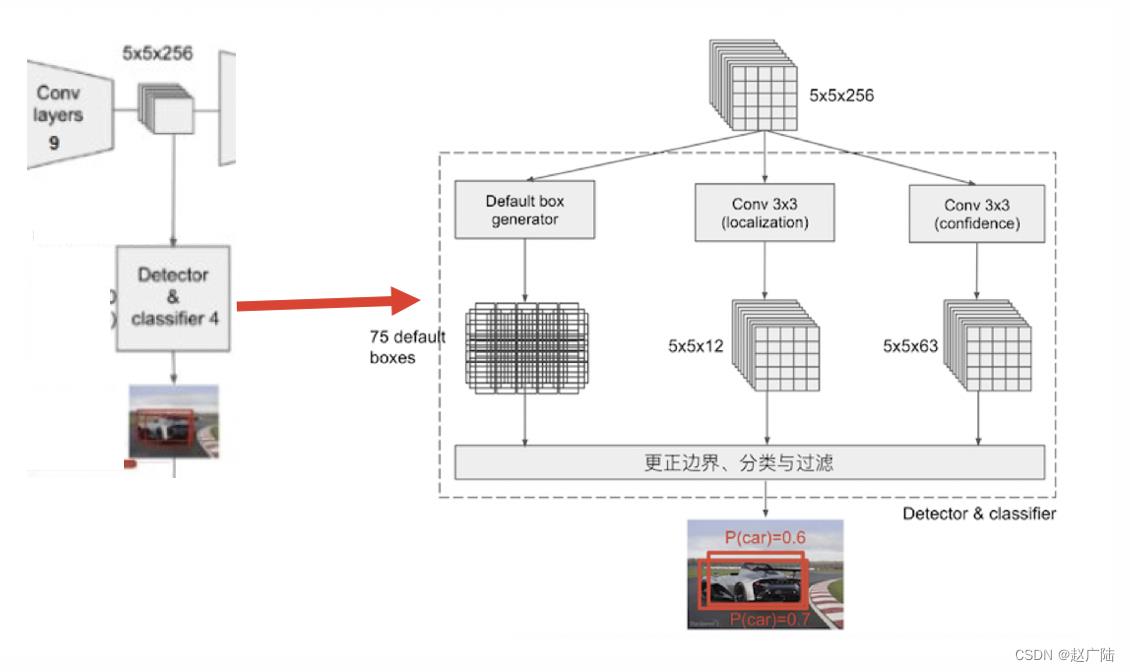
该部分主要有3个支路构成,
- PriorBox层,用来生成先验框,也就是在fasterRCNN中的anchorbox,假设先验框种类有3个(一个单元上有3个先验框),一共产生5x5x3=75个先验框
- Localization: 采用一次3×3卷积来进行完成,每个先验框有四个坐标,共有5x5x3x4个预测结果
- 类别置信度confdence:采用一次3×3卷积来进行完成,每个先验框有21个类别预测结果(VOC数据集),共有5x5x3x21个预测结果
整个过程如下图所示:

1.3.1 PriorBox层先验框的生成方法
在这里我们着重介绍PriorBox层先验框的生成方法:
SSD一共有6个不同尺度的特征图,每个特征图上设置的先验框数量不同的(同一个特征图上每个单元设置的先验框是相同的,这里的数目指的是一个单元的先验框数目)。
先验框的设置:包括尺度(或者说大小)和长宽比两个方面。

- 先验框的尺度
先验框的尺度遵守一个线性递增规则:随着特征图大小降低,先验框尺度线性增加,每个先验框的尺度有下式决定:
s k = s min + s max − s mi m − 1 ( k − 1 ) , k ∈ [ 1 , m ] s_k=s_\\min +\\fracs_\\max -s_\\operatornamemim-1(k-1), k \\in[1, m]sk=smin+m−1smax−smi(k−1),k∈[1,m]
其中:
m 指的特征图个数,这里设为5 ,因为第一层(Conv4_3层)是单独设置的。sk表示先验框大小相对于图片的比例,而 smin 和 smax表示比例的最小值与最大值,取值为0.2和0.9。
1、对于第一个特征图,其先验框的尺度比例一般设置为 smin/2=0.1 ,尺度为 300×0.1=30。
2、对于后面的特征图,先验框尺度按照 sk 线性增加,增长步长为:
⌊ ⌊ s max ⌋ − ⌊ s min ⌋ m − 1 ⌋ = 0.17 \\left\\lfloor\\frac\\left\\lfloor s_\\max \\right\\rfloor-\\left\\lfloor s_\\min \\right\\rfloorm-1\\right\\rfloor=0.17⌊m−1⌊smax⌋−⌊smin⌋⌋=0.17
3、根据上式,我们可以计算出各个尺度 sk 的取值为0.20, 0.37,0. 54, 0.71, 0.88
4、然后再乘以原图的大小300,再综合第一个特征图的先验框尺寸,则可得各个特征图的先验框尺寸为30,60,111, 162,213,264。
- 先验框的长宽比
一般选取 ar∈1,2,3,12,13,对于特定的长宽比,按如下公式计算先验框的宽度与高度(后面的 sk均指的是先验框实际尺度,而不是尺度比例):
w k a = s k a r , h k a = s k / a r w_k^a=s_k \\sqrta_r, h_k^a=s_k / \\sqrta_rwka=skar,hka=sk/ar
默认情况下,每个特征图会有一个 ar=1且尺度为 sk 的先验框,除此之外,还会设置一个尺度为 s k ′ = s k s k + 1 s_k^\\prime=\\sqrts_k s_k+1sk′=sksk+1且 ar=1的先验框,这样每个特征图都设置了两个长宽比为1但大小不同的正方形先验框。
因此,每个特征图一共有 6 个先验框1 , 2 , 3 , 1 2 , 1 3 , 1 ′ 1,2,3, \\frac12, \\frac13, 1^\\prime1,2,3,21,31,1′,但是在实现时,Conv4_3,Conv10_2和Conv11_2层仅使用4个先验框,它们不使用长宽比为3 , 1 3 3, \\frac133,31 的先验框。

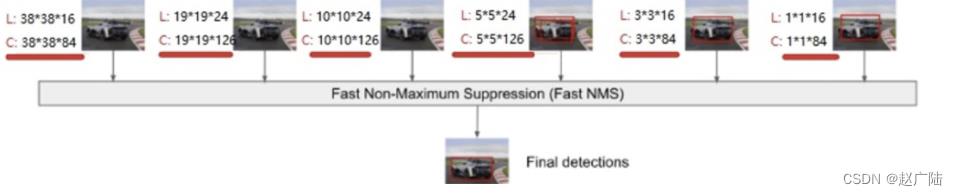
令 nknk为该特征图所采用的先验框数目,那么类别置信度需要的卷积核数量为 nk,而边界框位置需要的卷积核数量为 nk×4。由于每个先验框都会预测一个边界框,

所以SSD一共可以预测 38×38×4+19×19×6+10×10×6+5×5×6+3×3×4+1×1×4=8732个边界框,对于一个300x300的图像就有8732个预测结果,是非常的多的,所以说SSD本质上是密集采样。
1.3.2 loc的预测结果
网络预测输出的边界框与真实的边界框之间存在转换关系,具体如下:
- 先验框位置:
l = ( l c x , l c y , l w , l h ) l=\\left(l^c x, l^c y, l^w, l^h\\right)l=(lcx,lcy,lw,lh)
- 真实框的位置:
p = ( p c x , p c y , p w , p h ) p=\\left(p^c x, p^c y, p^w, p^h\\right)p=(pcx,pcy,pw,ph)
那么网络输出结果d与边界框的位置存在关系:
p c x = l w d c x + l c x , p c y = l y d c y + l c y p w = l w exp ( d w ) , p h = l h exp ( d h )
pcx=lwdcx+lcx,pcy=lydcy+lcypw=lwexp(dw),ph=lhexp(dh)pcx=lwdcx+lcx,pcy=lydcy+lcypw=lwexp(dw),ph=lhexp(dh)
pcx=lwdcx+lcx,pcy=lydcy+lcypw=lwexp(dw),ph=lhexp(dh)
2 模型训练
2.1 正负样本标记
在训练过程中,首先需要确定训练图片中的 ground truth 与哪一个先验框来进行匹配,与之匹配的先验框所对应的边界框将负责预测它。
SSD的先验框和ground truth匹配原则:
- 正样本
1、对于图片中的每个gt,找到与其IOU最大的先验框,该先验框与其匹配,这样可以保证每个gt一定与某个先验框匹配。
2、对于剩余未匹配的先验框,若某个gt的IOU大于某个阈值(一般0.5),那么该先验框与这个gt匹配
- 负样本
其它的先验框标记为负样本
注意:
1、某个gt可以和多个先验框匹配,而每个先验框只能和一个gt进行匹配
2、如果多个gt和某一个先验框的IOU均大于阈值,那么先验框只与IOU最大的那个进行匹配
2.2 损失函数
SSD的损失函数是位置损失( loc)与类别置信度损失(conf)的加权和:
L ( x , c , l , g ) = 1 N ( L conf ( x , c ) + α L loc ( x , l , g ) ) L(x, c, l, g)=\\frac1N\\left(L_\\text conf (x, c)+\\alpha L_\\text loc (x, l, g)\\right)L(x,c,l,g)=N1(Lconf (x,c)+αLloc (x,l,g))
其中N是先验框的正样本数量,c为类别置信度预测值, l为先验框的所对应边界框的位置预测值,而 g是ground truth的位置参数,权重系数 α 设置为1。
- 位置损失函数:
针对所有的正样本,采用 Smooth L1 Loss损失

- 分类损失函数
对于分类损失,与fasterRCNN一样采用交叉熵损失。
2.3 困难样本挖掘
困难样本挖掘的思想是使用网络对样本进行处理,把其中预测错误的负样本(hard negative)放入负样本集合再继续训练网络模型。

在SSD中处理方式是:
- 使用1:3的正负样本比例训练网络,
- 对输入的预测结果按照类别置信度进行降序排序,取出前k个负样本
- 将这k个负样本加入下次迭代的负样本中对网络进行训练。
3 模型预测
预测过程比较简单,
主要步骤如下:
- 对于每个预测框,首先根据类别置信度确定其类别(置信度最大者)与置信度值,并过滤掉属于背景的预测框。
- 然后根据置信度阈值(如0.5)过滤掉阈值较低的预测框。
- 对于留下的预测框进行解码,根据先验框得到其真实的位置参数(解码后一般还需要做clip,防止预测框位置超出图片)。
- 解码之后,一般需要根据置信度进行降序排列,然后仅保留top-k(如400)个预测框。
- 进行NMS算法,过滤掉那些重叠度较大的预测框。
- 最后剩余的预测框就是检测结果了。
4 总结
- 知道SSD的多尺度特征图的网络
SSD提取了6个不同特征图进行目标检测
- 知道SSD中先验框的生成方式
SSD在不同尺度的特征图上生成的先验框的尺度和长宽比是不一样的
- 知道SSD的损失函数的设计
分类和回归损失函数的加权和
以上是关于深度学习SSD算法的主要内容,如果未能解决你的问题,请参考以下文章
SSD Single shot detection 单发多框检测 实现 多尺度锚框 动手学深度学习v2
SSD Single shot detection 单发多框检测 实现 多尺度锚框 动手学深度学习v2
检测算法简介及其原理——fast R-CNN,faster R-CNN,YOLO,SSD,YOLOv2,YOLOv3