ZYNQ之FPGA学习----UART串口实验
Posted 鲁棒最小二乘支持向量机
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ZYNQ之FPGA学习----UART串口实验相关的知识,希望对你有一定的参考价值。
1 UART串口简介
UART串口基础知识学习:硬件设计基础----通信协议UART
2 实验任务
上位机通过串口调试助手发送数据给 Zynq,Zynq PL 端通过 RS232 串口接收数据并将接收到的数据发送给上位机,完成串口数据环回,管脚分配如下:

图片来自《领航者ZYNQ之FPGA开发指南》
3 实验设计
3.1 创建工程
新建工程,操作如图所示:

输入工程名字和工程路径,如图:

选择创建RTL工程,如图:
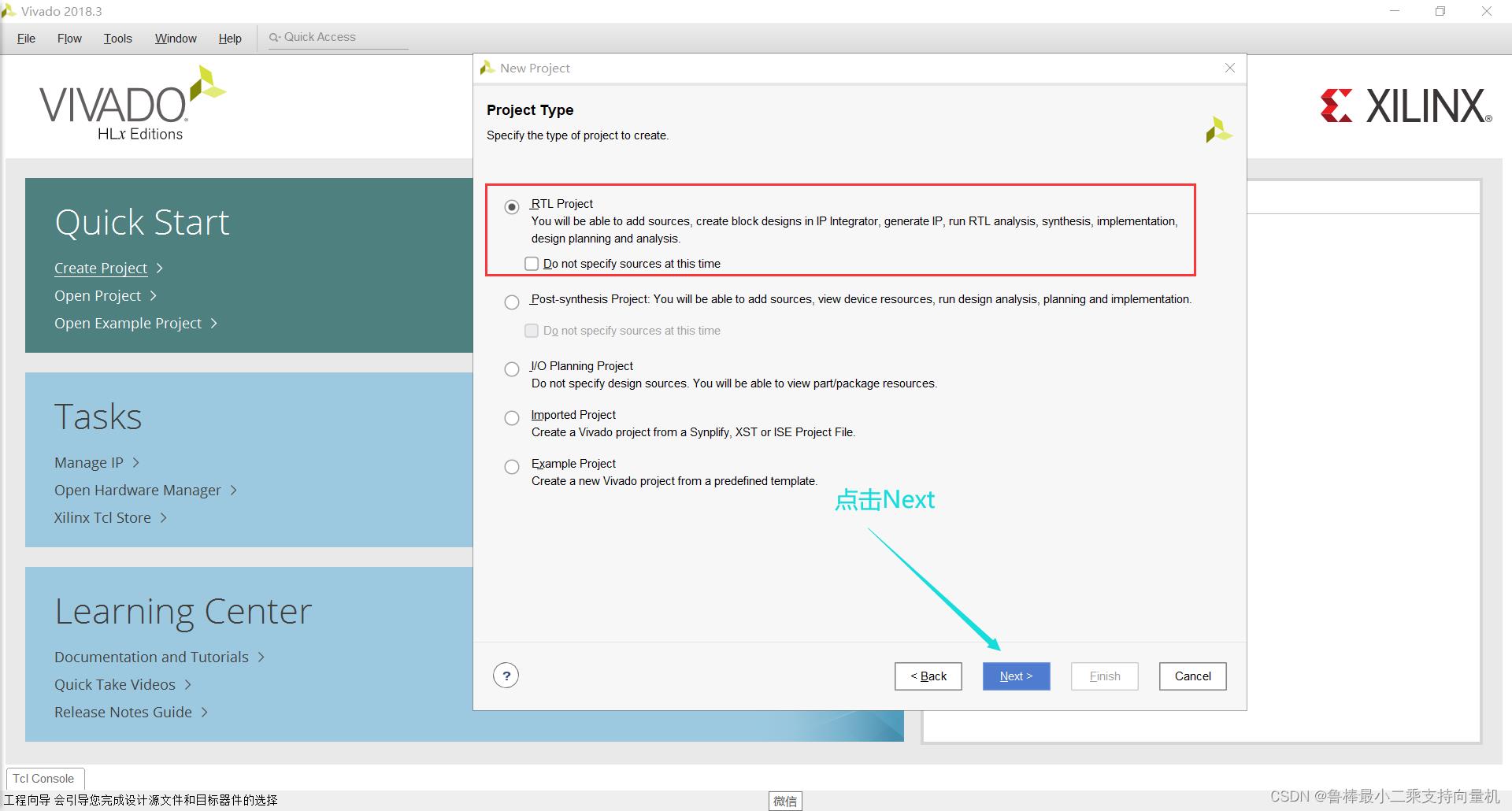
直接点击Next:

继续点击Next:

添加芯片型号,操作如图:
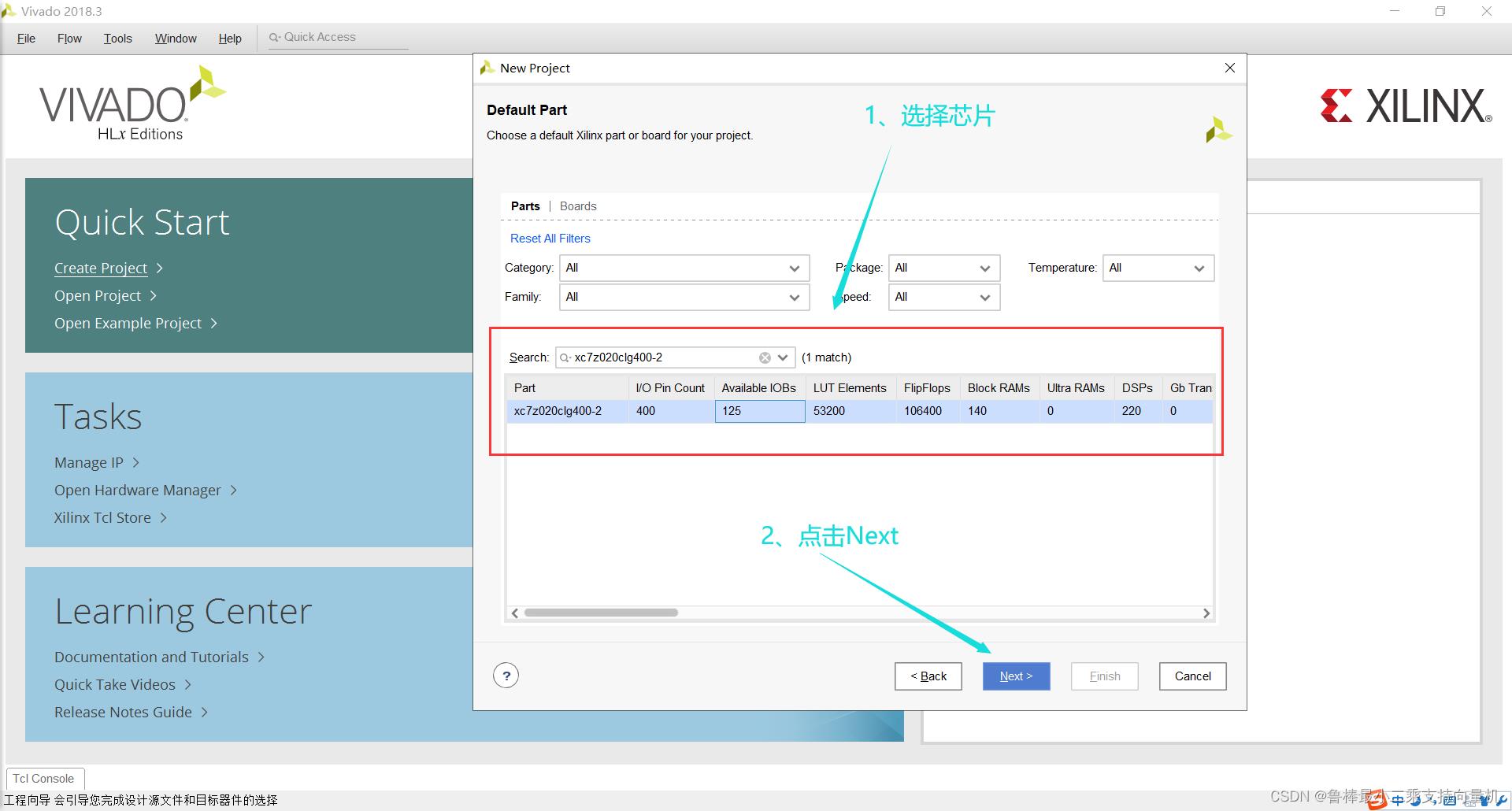
完成工程创建:

3.2 设计输入
创建工程顶层文件,操作如图:
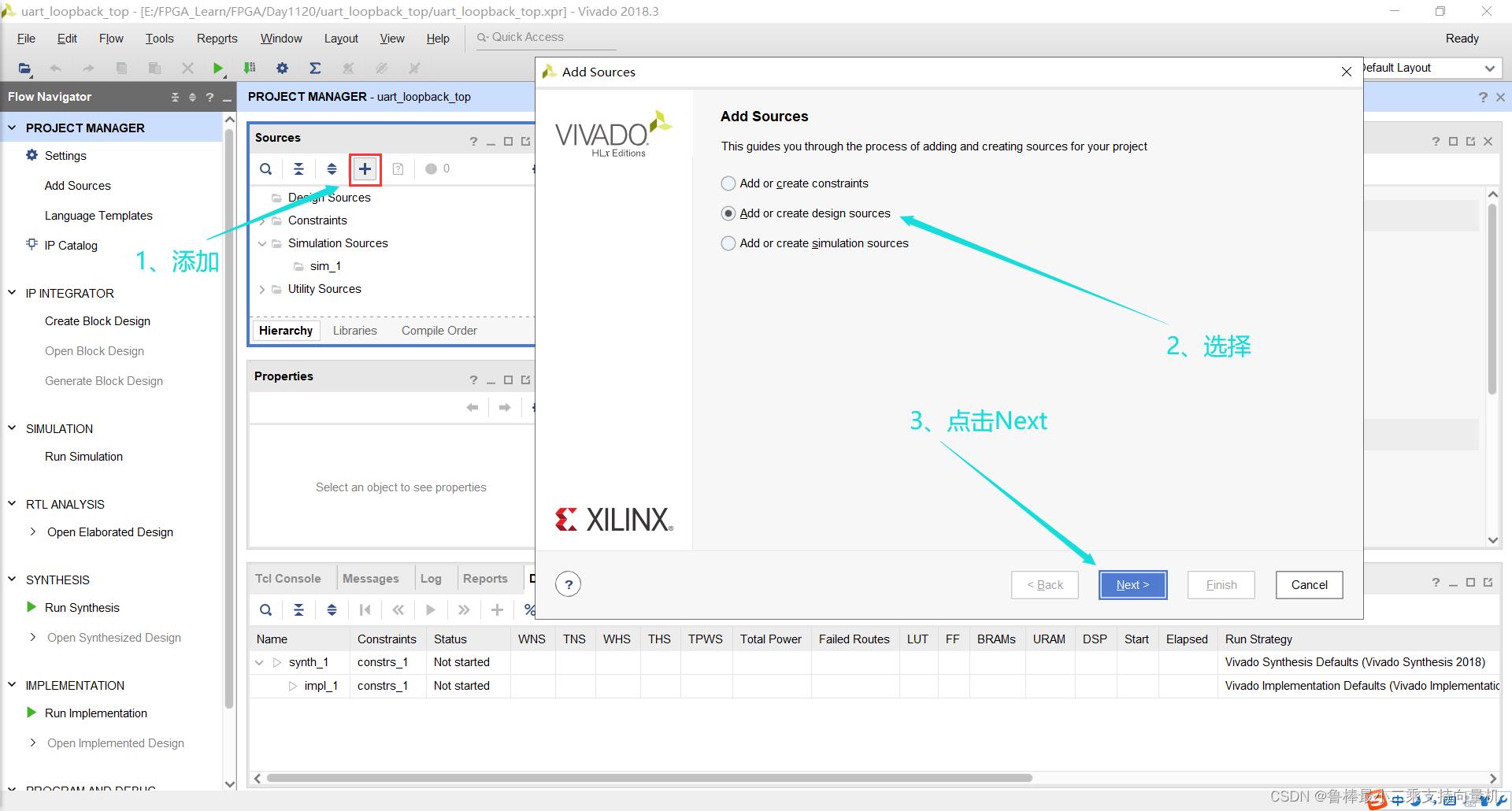
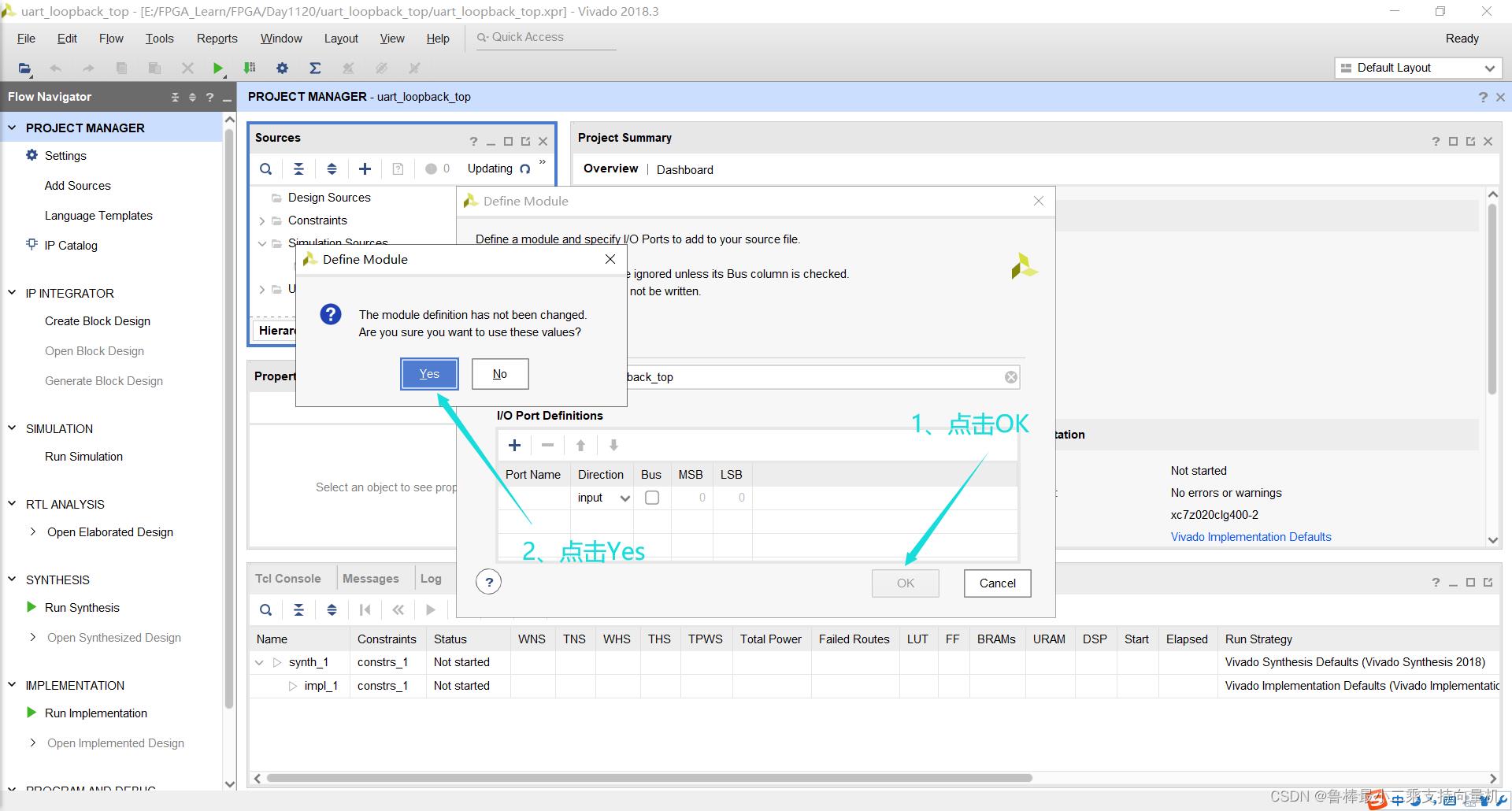
创建uart_loopback_top顶层模块:

创建完成:
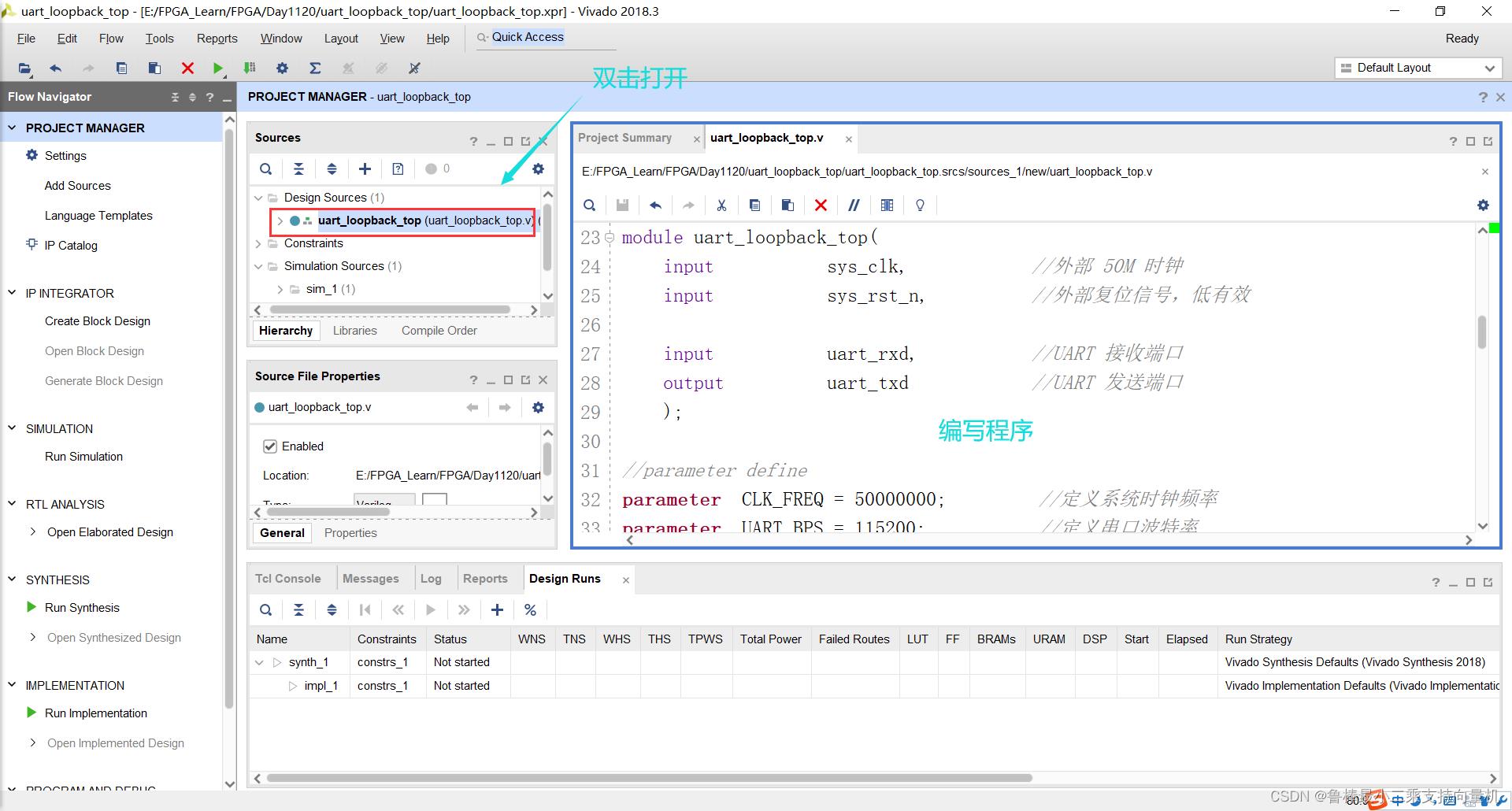
双击打开,输入代码如下:
module uart_loopback_top(
input sys_clk, //外部 50M 时钟
input sys_rst_n, //外部复位信号,低有效
input uart_rxd, //UART 接收端口
output uart_txd //UART 发送端口
);
//parameter define
parameter CLK_FREQ = 50000000; //定义系统时钟频率
parameter UART_BPS = 115200; //定义串口波特率
//wire define
wire uart_recv_done; //UART 接收完成
wire [7:0] uart_recv_data; //UART 接收数据
wire uart_send_en; //UART 发送使能
wire [7:0] uart_send_data; //UART 发送数据
wire uart_tx_busy; //UART 发送忙状态标志
//串口接收模块
uart_recv #(
.CLK_FREQ (CLK_FREQ ), //设置系统时钟频率
.UART_BPS (UART_BPS )) //设置串口接收波特率
u_uart_recv(
.sys_clk (sys_clk ),
.sys_rst_n (sys_rst_n ),
.uart_rxd (uart_rxd ),
.uart_done (uart_recv_done ),
.uart_data (uart_recv_data)
);
//串口发送模块
uart_send #(
.CLK_FREQ (CLK_FREQ ), //设置系统时钟频率
.UART_BPS (UART_BPS )) //设置串口发送波特率
u_uart_send(
.sys_clk (sys_clk ),
.sys_rst_n (sys_rst_n ),
.uart_en (uart_send_en ),
.uart_din (uart_send_data ),
.uart_tx_busy (uart_tx_busy ),
.uart_txd (uart_txd)
);
//串口环回模块
uart_loop u_uart_loop(
.sys_clk (sys_clk ),
.sys_rst_n (sys_rst_n ),
.recv_done (uart_recv_done ), //接收一帧数据完成标志信号
.recv_data (uart_recv_data ), //接收的数据
.tx_busy (uart_tx_busy ), //发送忙状态标志
.send_en (uart_send_en ), //发送使能信号
.send_data (uart_send_data) //待发送数据
);
endmodule
如图所示:
创建uart_recv文件,如图:

双击打开,输入代码:
module uart_recv(
input sys_clk, //系统时钟
input sys_rst_n, //系统复位,低电平有效
input uart_rxd, //UART 接收端口
output reg uart_done, //接收一帧数据完成标志
output reg [7:0] uart_data //接收的数据
);
//parameter define
parameter CLK_FREQ = 50000000; //系统时钟频率
parameter UART_BPS = 9600; //串口波特率
localparam BPS_CNT = CLK_FREQ/UART_BPS; //为得到指定波特率,
//需要对系统时钟计数 BPS_CNT 次
//reg define
reg uart_rxd_d0;
reg uart_rxd_d1;
reg [15:0] clk_cnt; //系统时钟计数器
reg [ 3:0] rx_cnt; //接收数据计数器
reg rx_flag; //接收过程标志信号
reg [ 7:0] rxdata; //接收数据寄存器
//wire define
wire start_flag;
//捕获接收端口下降沿(起始位),得到一个时钟周期的脉冲信号
assign start_flag = uart_rxd_d1 & (~uart_rxd_d0 );
//对 UART 接收端口的数据延迟两个时钟周期
always @( posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n) begin
uart_rxd_d0 <= 1'b0;
uart_rxd_d1 <= 1'b0;
end
else begin
uart_rxd_d0 <= uart_rxd;
uart_rxd_d1 <= uart_rxd_d0;
end
end
//当脉冲信号 start_flag 到达时,进入接收过程
always @( posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n)
rx_flag <= 1'b0;
else begin
if(start_flag) //检测到起始位
rx_flag <= 1'b1; //进入接收过程,标志位 rx_flag 拉高
//计数到停止位中间时,停止接收过程
else if ((rx_cnt == 4'd9) && (clk_cnt == BPS_CNT/2 ))
rx_flag <= 1'b0; //接收过程结束,标志位 rx_flag 拉低
else
rx_flag <= rx_flag;
end
end
//进入接收过程后,启动系统时钟计数器
always @( posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n)
clk_cnt <= 16'd0;
else if ( rx_flag ) begin //处于接收过程
if (clk_cnt < BPS_CNT - 1)
clk_cnt <= clk_cnt + 1'b1;
else
clk_cnt <= 16'd0; //对系统时钟计数达一个波特率周期后清零
end
else
clk_cnt <= 16'd0; //接收过程结束,计数器清零
end
//进入接收过程后,启动接收数据计数器
always @( posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n)
rx_cnt <= 4'd0;
else if ( rx_flag ) begin //处于接收过程
if (clk_cnt == BPS_CNT - 1) //对系统时钟计数达一个波特率周期
rx_cnt <= rx_cnt + 1'b1; //此时接收数据计数器加 1
else
rx_cnt <= rx_cnt;
end
else
rx_cnt <= 4'd0; //接收过程结束,计数器清零
end
//根据接收数据计数器来寄存 uart 接收端口数据
always @( posedge sys_clk or negedge sys_rst_n) begin
if ( !sys_rst_n)
rxdata <= 8'd0;
else if(rx_flag) //系统处于接收过程
if (clk_cnt == BPS_CNT/2) begin //判断系统时钟计数器计数到数据位中间
case ( rx_cnt )
4'd1 : rxdata[0] <= uart_rxd_d1; //寄存数据位最低位
4'd2 : rxdata[1] <= uart_rxd_d1;
4'd3 : rxdata[2] <= uart_rxd_d1;
4'd4 : rxdata[3] <= uart_rxd_d1;
4'd5 : rxdata[4] <= uart_rxd_d1;
4'd6 : rxdata[5] <= uart_rxd_d1;
4'd7 : rxdata[6] <= uart_rxd_d1;
4'd8 : rxdata[7] <= uart_rxd_d1; //寄存数据位最高位
default :;
endcase
end
else
rxdata <= rxdata;
else
rxdata <= 8'd0;
end
//数据接收完毕后给出标志信号并寄存输出接收到的数据
always @( posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n) begin
uart_data <= 8'd0;
uart_done <= 1'b0;
end
else if(rx_cnt == 4'd9) begin //接收数据计数器计数到停止位时
uart_data <= rxdata; //寄存输出接收到的数据
uart_done <= 1'b1; //并将接收完成标志位拉高
end
else begin
uart_data <= 8'd0;
uart_done <= 1'b0;
end
end
endmodule
如图所示:

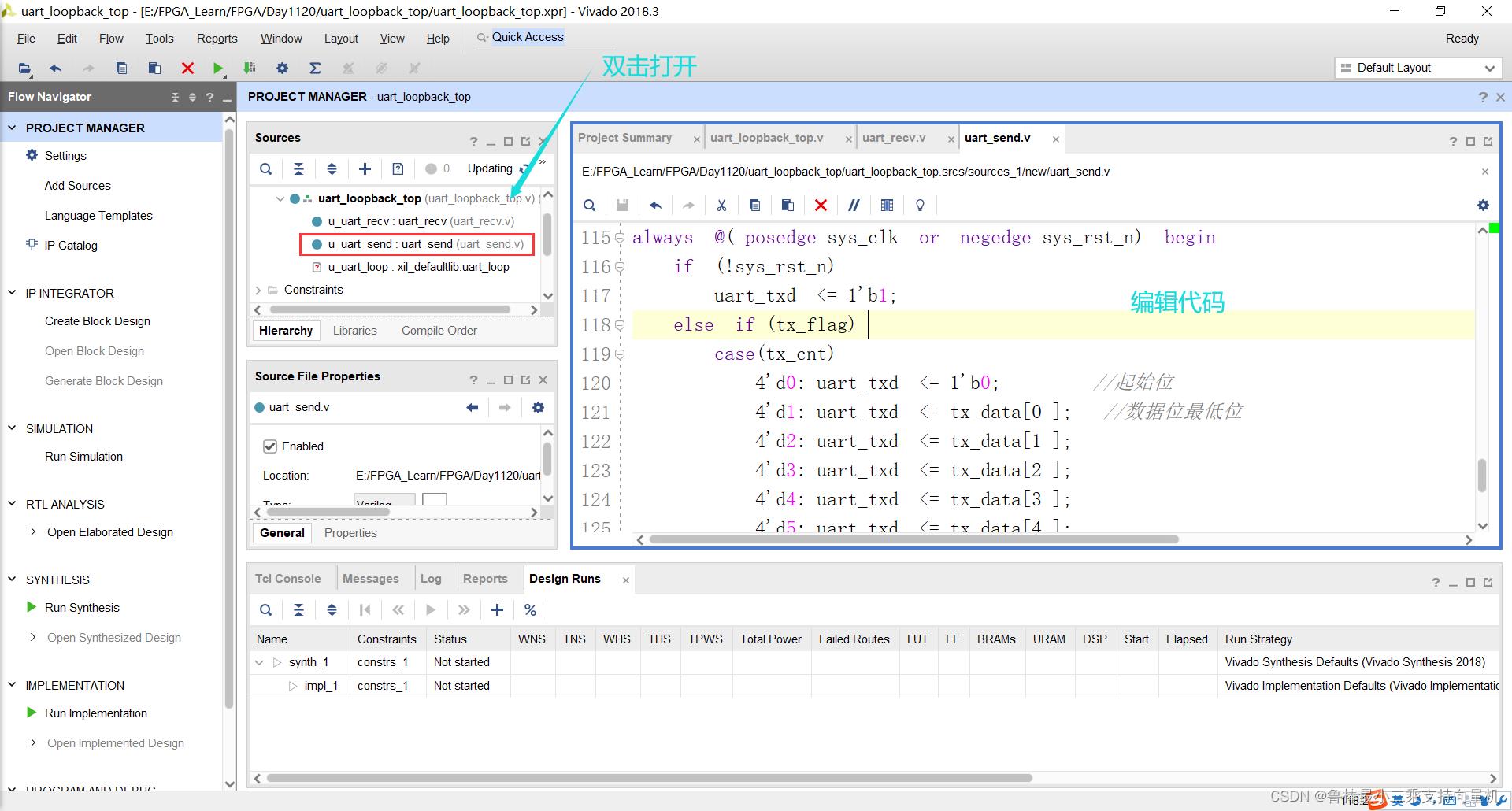
创建uart_send文件,如图所示:

双击打开文件,输入代码:
module uart_send(
input sys_clk, //系统时钟
input sys_rst_n, //系统复位,低电平有效
input uart_en, //发送使能信号
input [7:0] uart_din, //待发送数据
output uart_tx_busy, //发送忙状态标志
output reg uart_txd //UART 发送端口
);
//parameter define
parameter CLK_FREQ = 50000000; //系统时钟频率
parameter UART_BPS = 9600; //串口波特率
localparam BPS_CNT = CLK_FREQ/UART_BPS; //为得到指定波特率,对系统时钟计数 BPS_CNT 次
//reg define
reg uart_en_d0;
reg uart_en_d1;
reg [15:0] clk_cnt; //系统时钟计数器
reg [ 3:0] tx_cnt; //发送数据计数器
reg tx_flag; //发送过程标志信号
reg [ 7:0] tx_data; //寄存发送数据
//wire define
wire en_flag;
assign uart_tx_busy = tx_flag;
//捕获 uart_en 上升沿,得到一个时钟周期的脉冲信号
assign en_flag = (~uart_en_d1) & uart_en_d0;
//对发送使能信号 uart_en 延迟两个时钟周期
always @( posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n) begin
uart_en_d0 <= 1'b0;
uart_en_d1 <= 1'b0;
end
else begin
uart_en_d0 <= uart_en;
uart_en_d1 <= uart_en_d0;
end
end
//当脉冲信号 en_flag 到达时,寄存待发送的数据,并进入发送过程
always @( posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n) begin
tx_flag <= 1'b0;
tx_data <= 8'd0;
end
else if (en_flag) begin //检测到发送使能上升沿
tx_flag <= 1'b1; //进入发送过程,标志位 tx_flag 拉高
tx_data <= uart_din; //寄存待发送的数据
end
//计数到停止位结束时,停止发送过程
else if ((tx_cnt == 4'd9) && (clk_cnt == BPS_CNT -(BPS_CNT/16) )) begin
tx_flag <= 1'b0; //发送过程结束,标志位 tx_flag 拉低
tx_data <= 8'd0;
end
else begin
tx_flag <= tx_flag;
tx_data <= tx_data;
end
end
//进入发送过程后,启动系统时钟计数器
always @( posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n)
clk_cnt <= 16'd0;
else if (tx_flag) begin //处于发送过程
if (clk_cnt < BPS_CNT - 1)
clk_cnt <= clk_cnt + 1'b1;
else
clk_cnt <= 16'd0; //对系统时钟计数达一个波特率周期后清零
end
else
clk_cnt <= 16'd0; //发送过程结束
end
//进入发送过程后,启动发送数据计数器
always @( posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n)
tx_cnt <= 4'd0;
else if (tx_flag) begin //处于发送过程
if (clk_cnt == BPS_CNT - 1) //对系统时钟计数达一个波特率周期
tx_cnt <= tx_cnt + 1'b1; //此时发送数据计数器加 1
else
tx_cnt <= tx_cnt;
end
else
tx_cnt <= 4'd0; //发送过程结束
end
//根据发送数据计数器来给 uart 发送端口赋值
always @( posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n)
uart_txd <= 1'b1;
else if (tx_flag)
case(tx_cnt)
4'd0: uart_txd <= 1'b0; //起始位
4'd1: uart_txd <= tx_data[0 ]; //数据位最低位
4'd2: uart_txd <= tx_data[1 ];
4'd3: uart_txd <= tx_data[2 ];
4'd4: uart_txd <= tx_data[3 ];
4'd5: uart_txd <= tx_data[4 ];
4'd6: uart_txd <= tx_data[5 ];
4'd7: uart_txd <= tx_data[6 ];
4'd8: uart_txd <= tx_data[7 ]; //数据位最高位
4'd9: uart_txd <= 1'b1; //停止位
default: ;
endcase
else
uart_txd <= 1'b1; //空闲时发送端口为高电平
end
endmodule
如图所示:
创建uart_loop文件,如图所示:
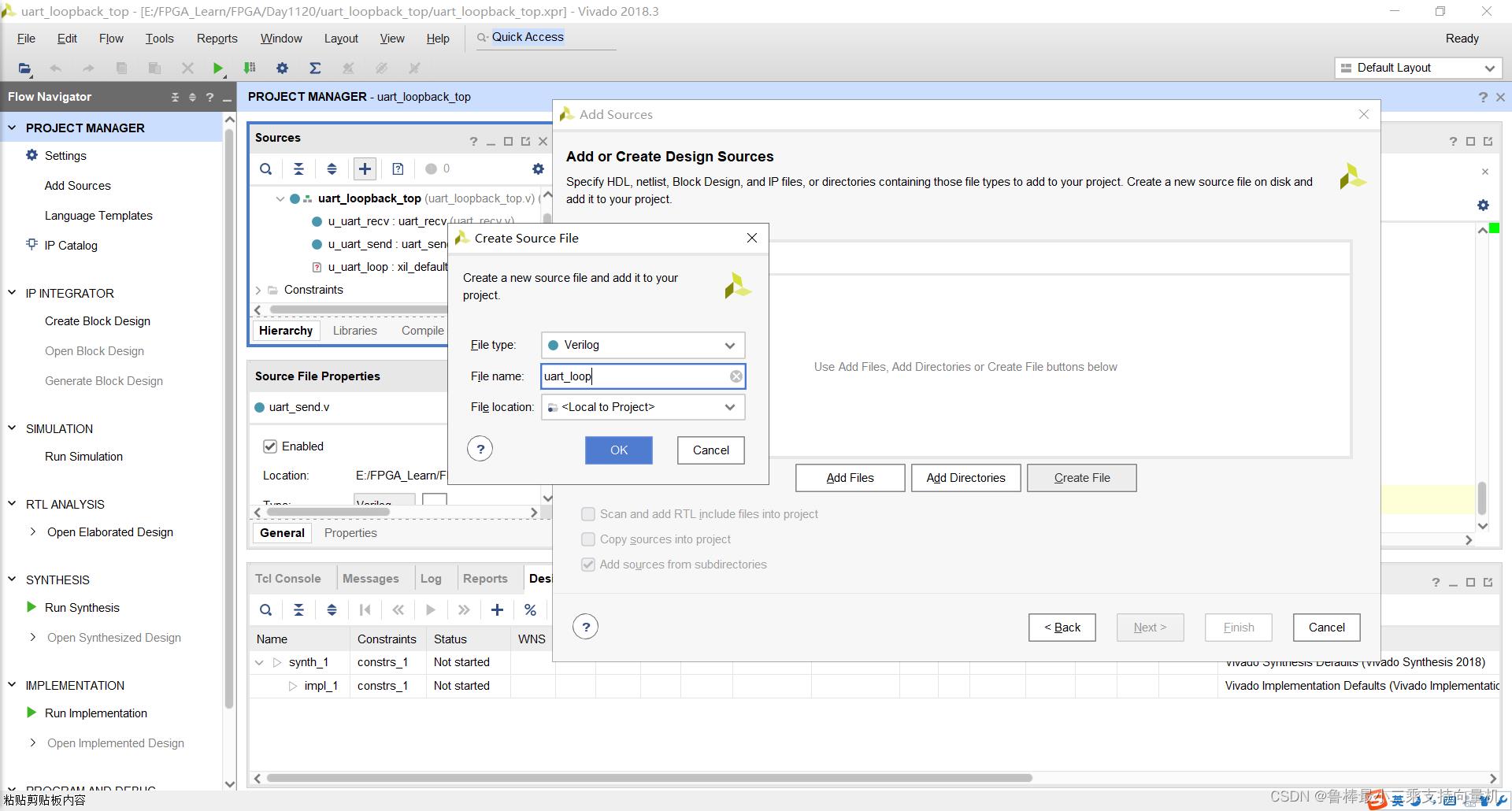
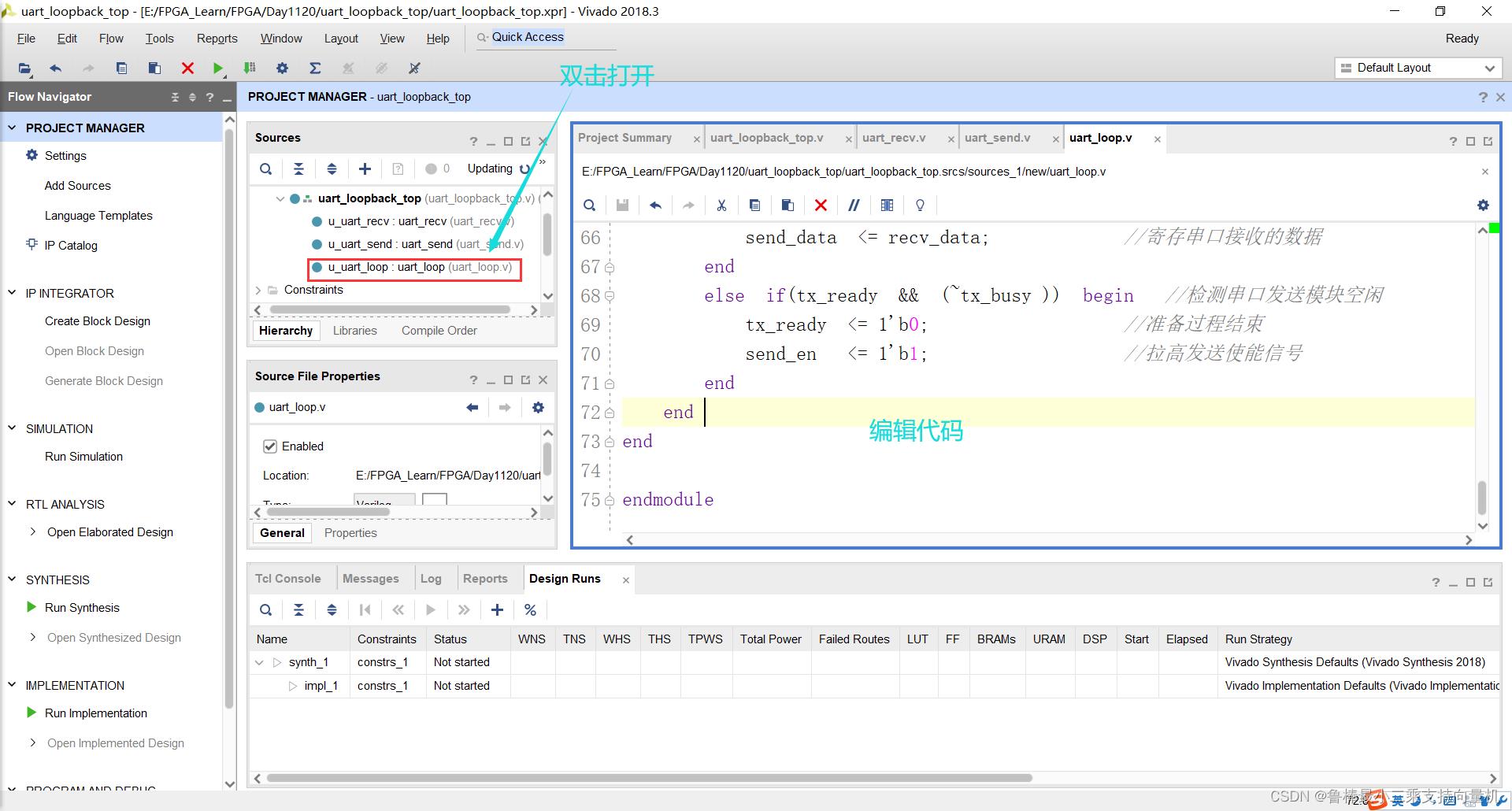
双击打开,输入代码:
module uart_loop(
input sys_clk, //系统时钟
input sys_rst_n, //系统复位,低电平有效
input recv_done, //接收一帧数据完成标志
input [7:0] recv_data, //接收的数据
input tx_busy, //发送忙状态标志
output reg send_en, //发送使能信号
output reg [7:0] send_data //待发送数据
);
reg recv_done_d0;
reg recv_done_d1;
reg tx_ready;
wire recv_done_flag;
//捕获 recv_done 上升沿,得到一个时钟周期的脉冲信号
assign recv_done_flag = (~recv_done_d1) & recv_done_d0;
//对发送使能信号 recv_done 延迟两个时钟周期
always @( posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n) begin
recv_done_d0 <= 1'b0;
recv_done_d1 <= 1'b0;
end
else begin
recv_done_d0 <= recv_done;
recv_done_d1 <= recv_done_d0;
end
end
//判断接收完成信号,并在串口发送模块空闲时给出发送使能信号
always @( posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n) begin
tx_ready <= 1'b0;
send_en <= 1'b0;
send_data <= 8'd0;
end
else begin
if(recv_done_flag) begin //检测串口接收到数据
tx_ready <= 1'b1; //准备启动发送过程
send_en <= 1'b0;
send_data <= recv_data; //寄存串口接收的数据
end
else if(tx_ready && (~tx_busy )) begin //检测串口发送模块空闲
tx_ready <= 1'b0; //准备过程结束
send_en <= 1'b1; //拉高发送使能信号
end
end
end
endmodule
如图所示:
3.3 分析与综合
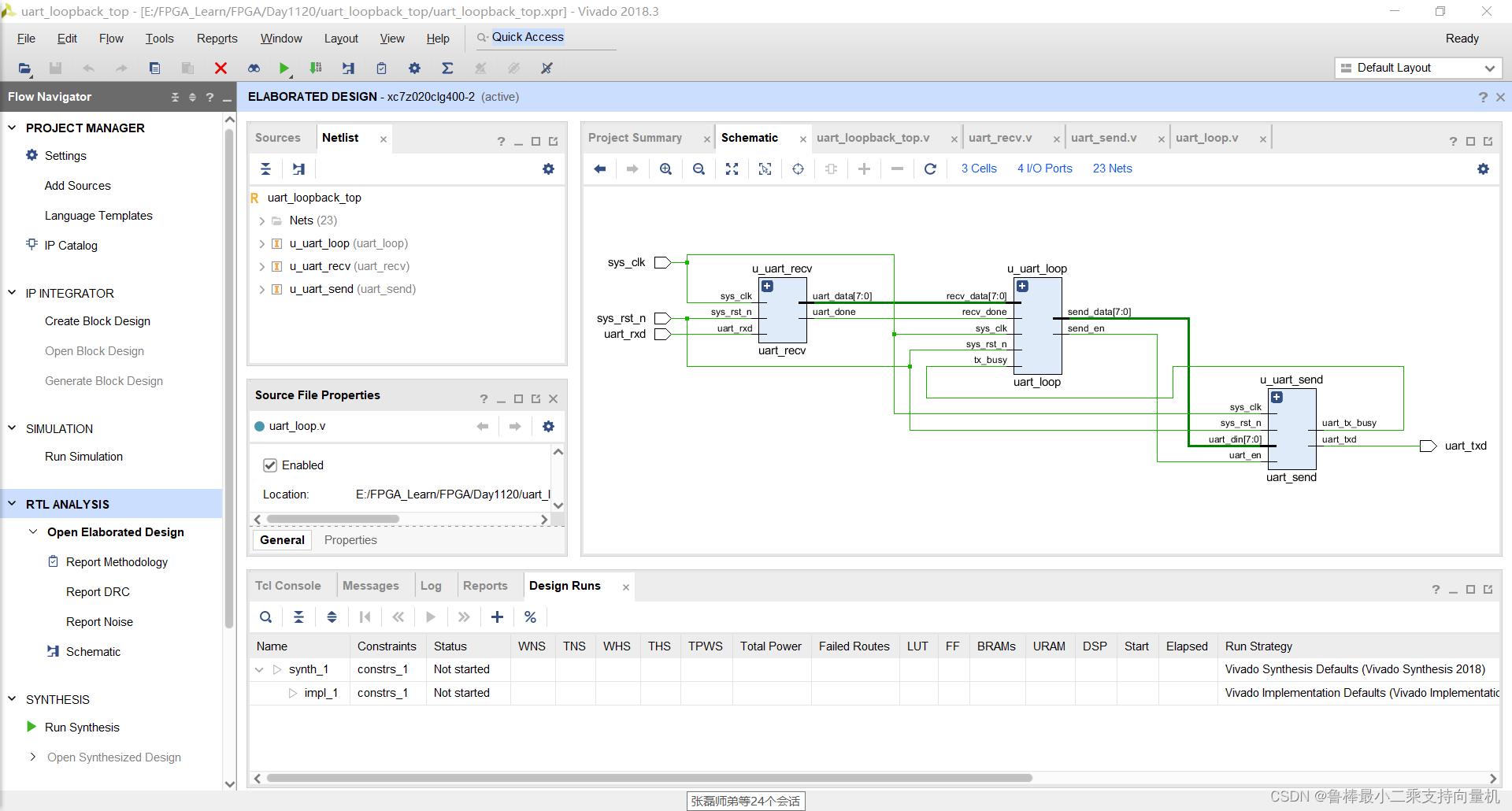
对设计进行分析,操作如图:

分析后的设计,Vivado自动生成顶层原理图,如图:
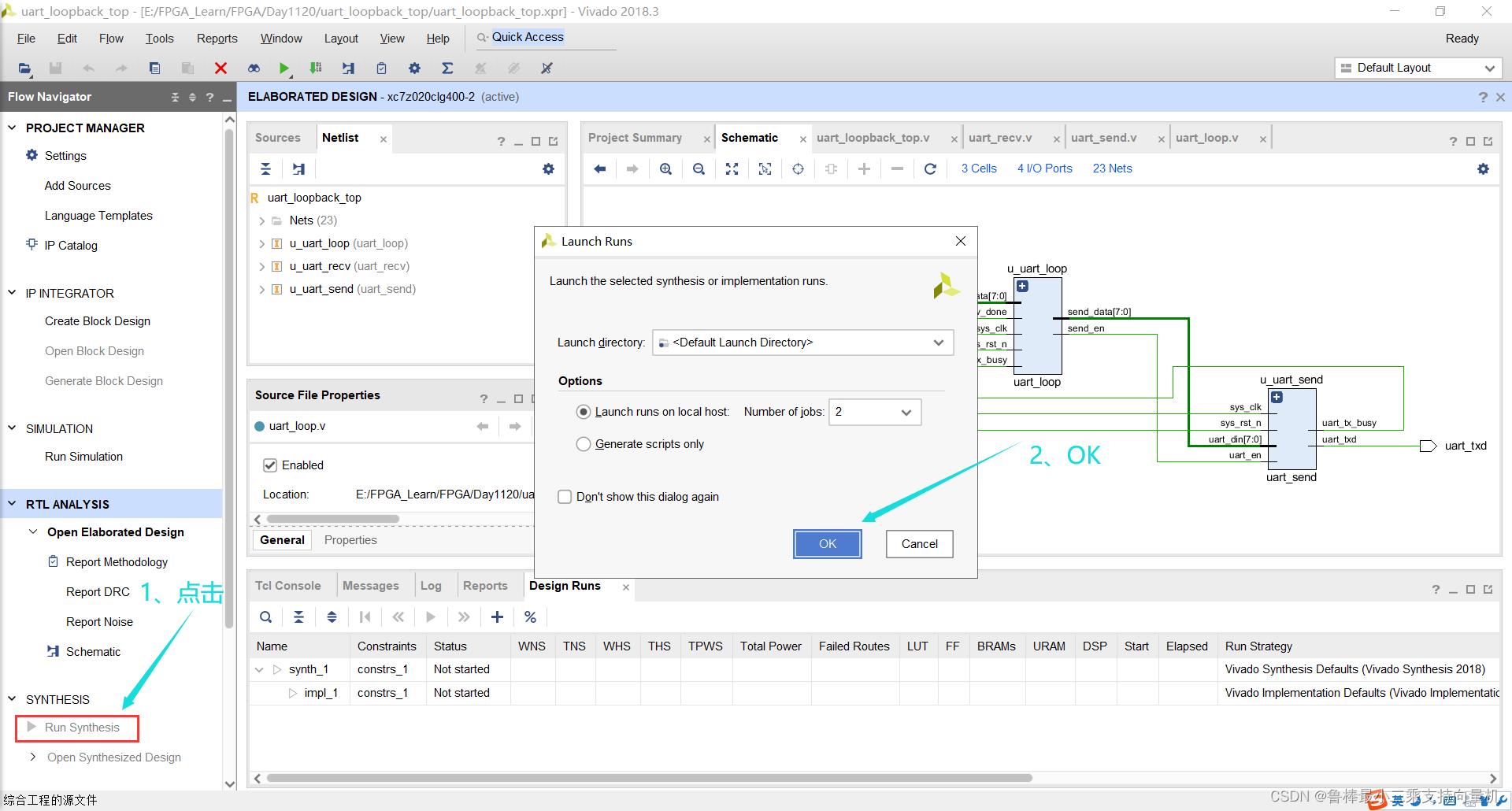
对设计进行综合,操作如图:
综合完成后,弹出窗口如下,直接关闭:

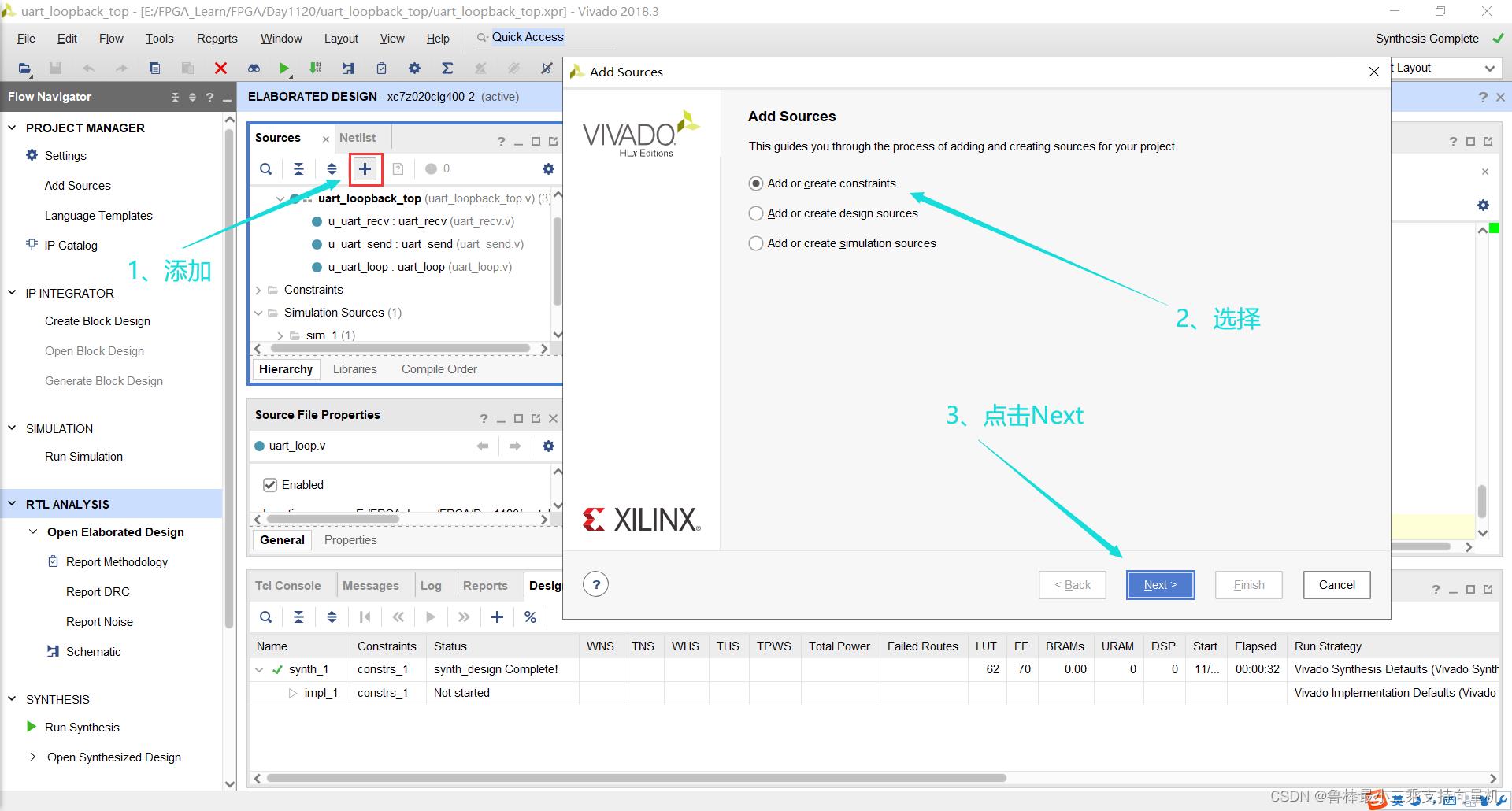
3.4 约束输入
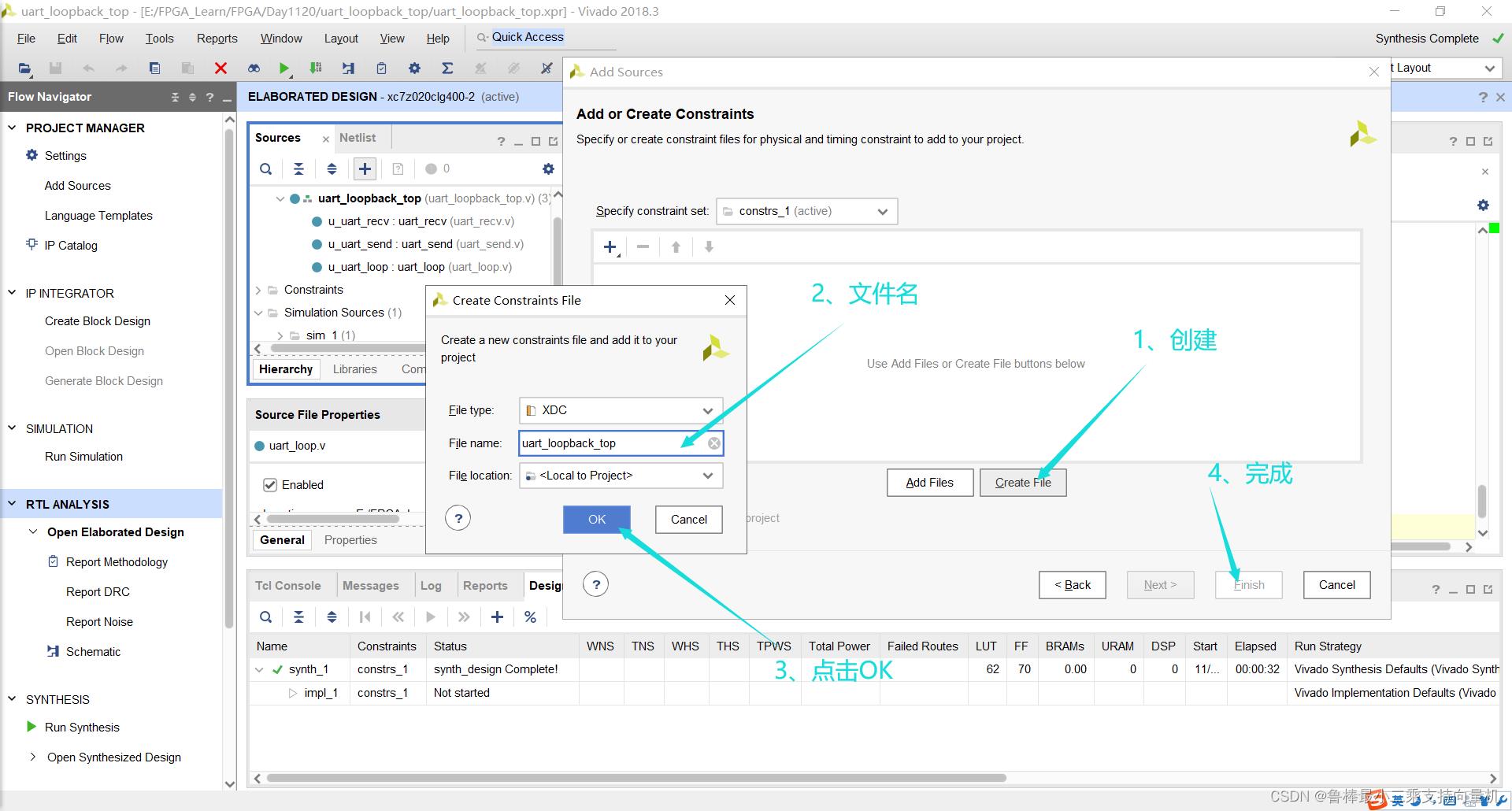
创建约束文件,操作如图所示:
创建约束文件,输入文件名:
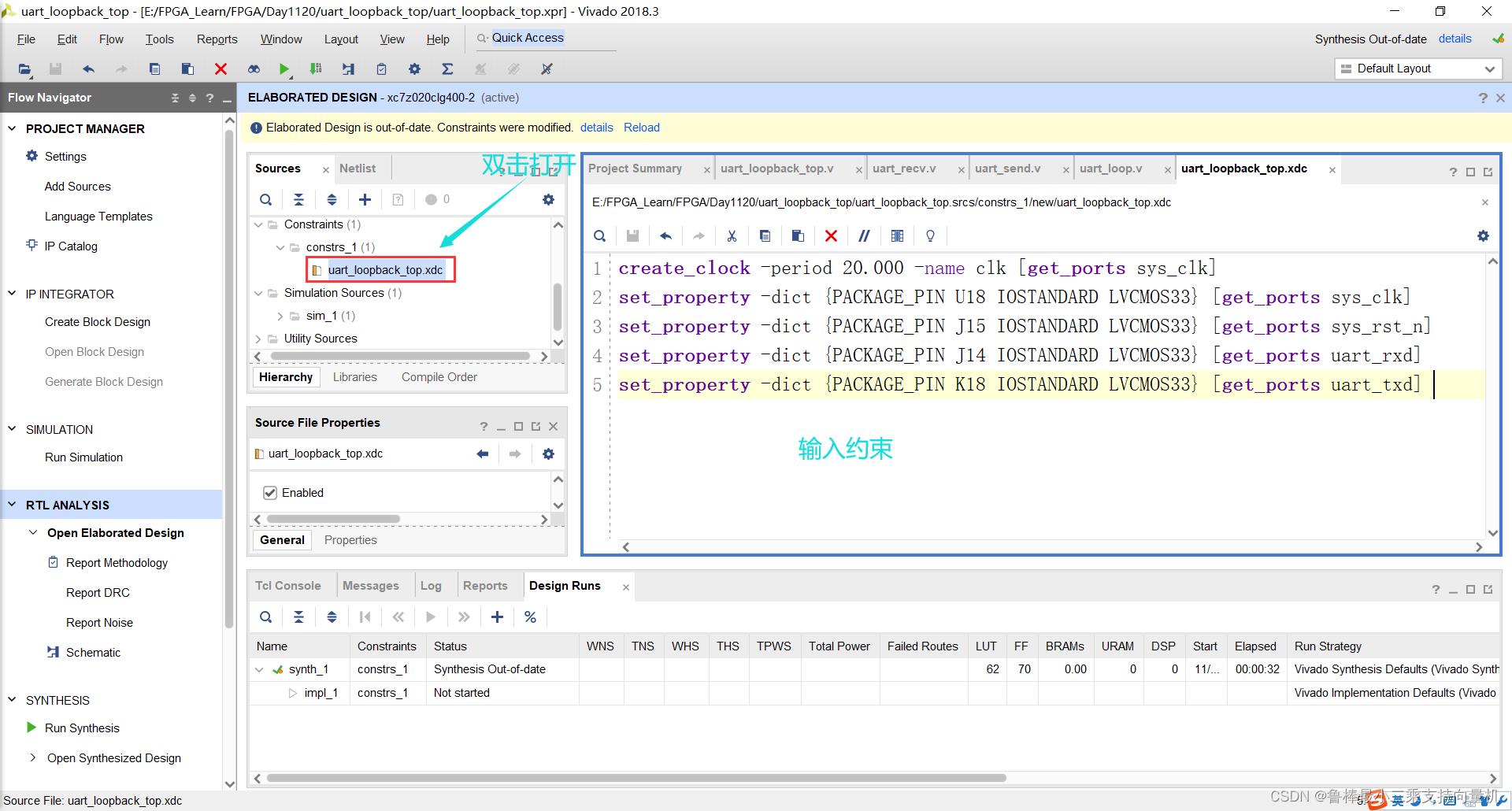
双击打开,输入约束代码:
create_clock -period 20.000 -name clk [get_ports sys_clk]
set_property -dict PACKAGE_PIN U18 iosTANDARD LVCMOS33 [get_ports sys_clk]
set_property -dict PACKAGE_PIN J15 IOSTANDARD LVCMOS33 [get_ports sys_rst_n]
set_property -dict PACKAGE_PIN J14 IOSTANDARD LVCMOS33 [get_ports uart_rxd]
set_property -dict PACKAGE_PIN K18 IOSTANDARD LVCMOS33 [get_ports uart_txd]
如图所示:
3.5 设计实现
点击 Flow Navigator 窗口中的 Run Implementation,如图所示:

点击OK:

完成后,直接关闭:

3.6 功能仿真
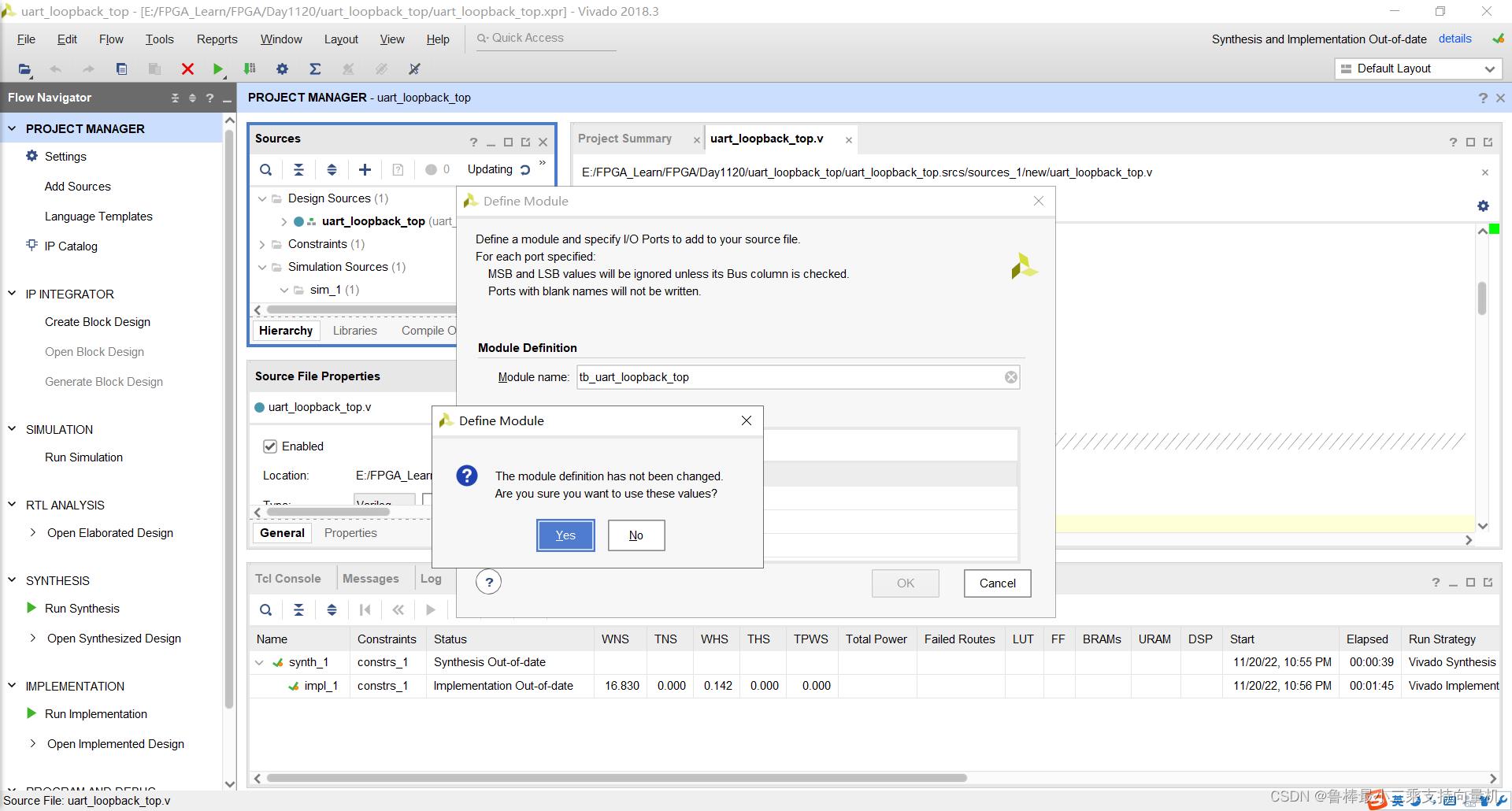
创建TestBench,操作如图所示:

创建激励文件,输入文件名:
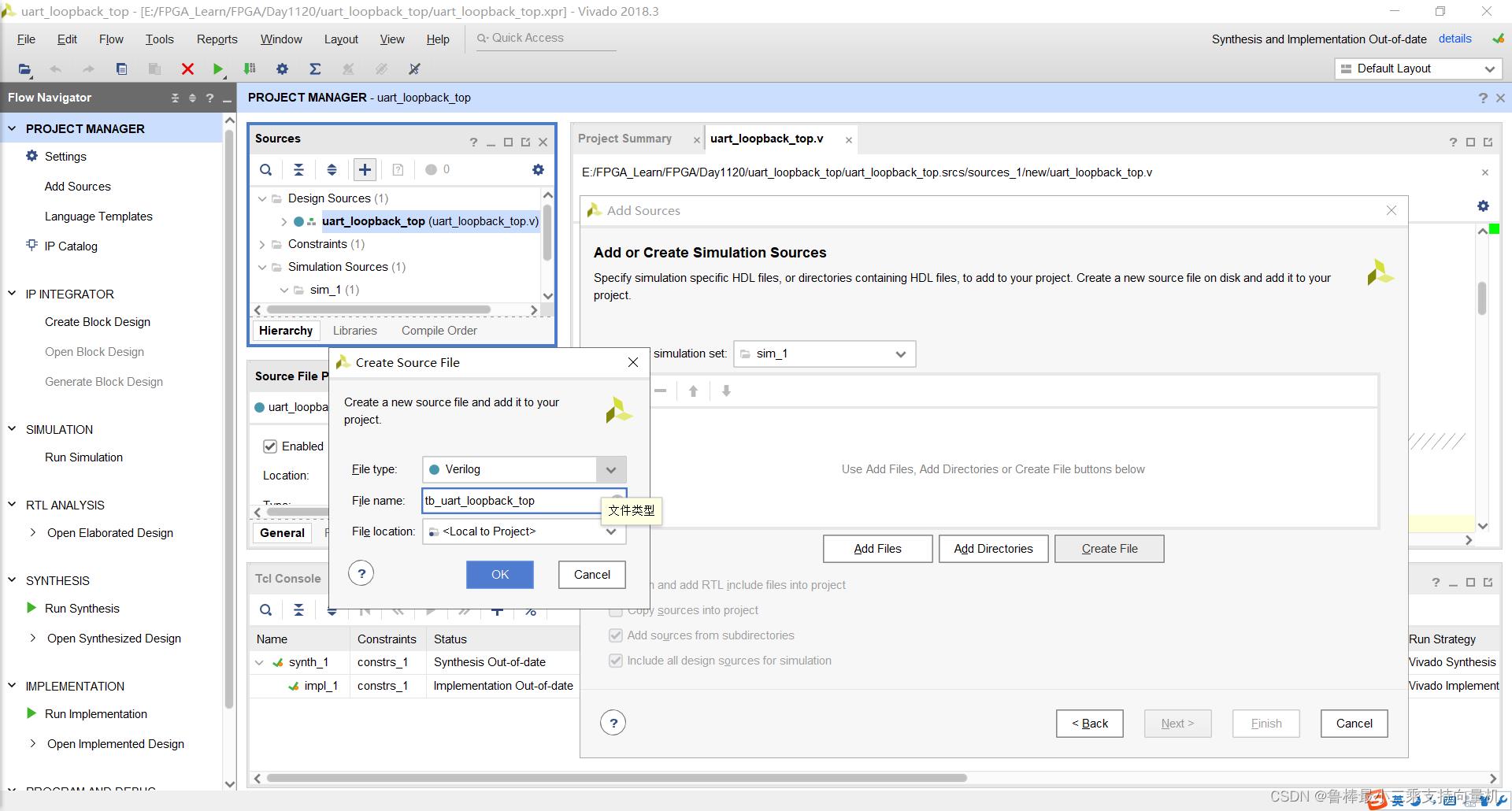
创建完成:
双击打开,输入TestBench(激励)代码:
`timescale 1ns / 1ps
module tb_uart_loopback_top();
reg sys_clk;
reg sys_rst_n;
reg uart_rxd;
wire uart_txd;
parameter SYS_CLK = 50; //系统时钟频率,单位Mhz
parameter SYS_PRE = 1000/(SYS_CLK*2); //时钟周期,单位ns
parameter UART_BPS = 115200; //串口波特率
parameter BPS_CNT = 1_000_000_000/UART_BPS;//用于串口仿真的时延
//初始时刻定义
initial begin
$timeformat(-9, 0, " ns", 10); //定义时间显示格式
sys_clk = 1'b0;
sys_rst_n = 1'b0;
uart_rxd <= 1'b1;
#200 //系统开始工作
sys_rst_n = 1'b1;
#3000
rx_byte($random % 256); //生成8位随机数1
rx_byte($random % 256); //生成8位随机数2
rx_byte($random % 256); //生成8位随机数3
rx_byte($random % 256); //生成8位随机数4
rx_byte($random % 256); //生成8位随机数5
rx_byte($random % 256); //生成8位随机数6
rx_byte($random % 256); //生成8位随机数7
rx_byte($random % 256); //生成8位随机数8
#600
$finish();
end
//定义任务,每次发送的数据10 位(起始位1+数据位8+停止位1)
task rx_byte(
input [7:0] data
);
integer i; //定义一个常量
//用 for 循环产生一帧数据,for 括号中最后执行的内容只能写 i=i+1
for(i=0; i<10; i=i+1) begin
case(i)
ZYNQ之FPGA学习----EEPROM读写测试实验