基于NXP i.MX8 Ethercat实时运动控制器设计 Linux+xenomai+igh+rtnet
Posted 深圳信迈科技DSP+ARM+FPGA
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了基于NXP i.MX8 Ethercat实时运动控制器设计 Linux+xenomai+igh+rtnet相关的知识,希望对你有一定的参考价值。
硬件平台:imx8
软件架构:Linux+xenomai+igh+rtnet

基于NXP IMX8处理器设计,四核ARM-A53 ,主频最高1.3GHz,板载2GB RAM,8GB ROM;工作环境温度为-40℃~85℃,满足工业及泛工业场景应用。
i.MX8M处理器具有业界领先的音频、语音和视频处理功能,提供全4K UltraHD分辨率和HDR(Dolby Vision、HDR10和HLG),提供最高水平的专业音频保真度,适用于无风扇运行,散热系统成本低、电池寿命长。
具有最新的高速接口可提供灵活连接等优势,并且提供10~15年产品长期供货计划。
·双独立显示输出
MIPI-DSI(1080p)和HDMI 2.0a(4K)
Vivante GC7000 Lite GPU,
支持OpenGL ES 3.1, OpenGL 3.0,Vulkan, Open CL 1.2
·视频解码
4Kp60 HDR(h.265, VP9), 4Kp30 (h.264), 1080p60 (MPEG2, MPEG4p2,
VC1, VP8, RV9, AVS/AVS+, h.263, DiVX), MJPEG - 8x8
·视频编码
1080p60 (MPEG2, MPEG4p2, VC1, VP8, RV9, AVS, h.263)-软编码
·丰富的外设接口
2x MIPI-CSI、2x USB3.0、2x PCIe2.0、4x UART、1Gb Ethernet

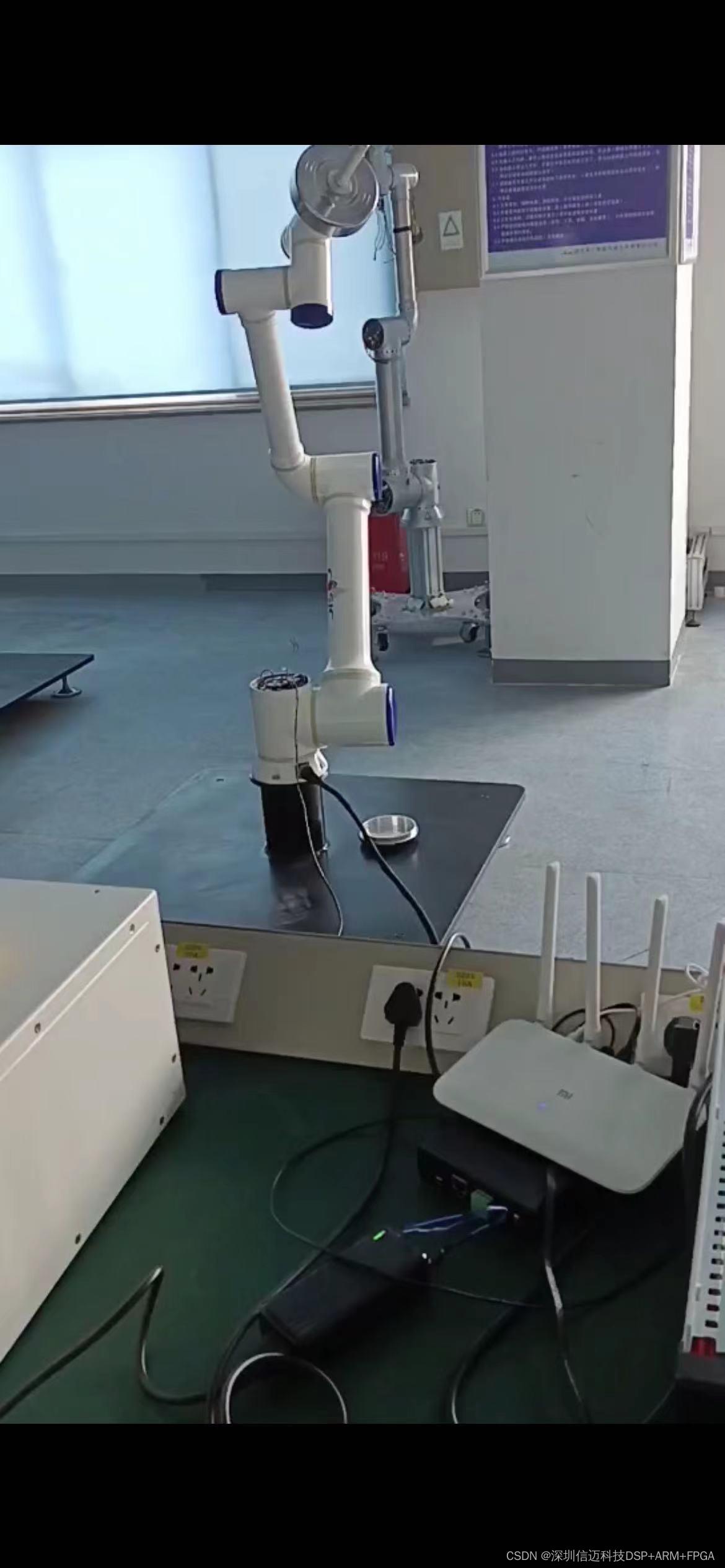
Ø本产品适用于机器人控制、非标自动化设备控制等需要对电机进行运动控制的装备上面。
Ø支持人机界面和应用层的二次开发。开发平台\\c++.
Ø采用ethercat实时总线100M速度,u级同步精度。支持通用EtherCAT伺服和io模块。支持ethercat伺服品牌有 松下、台达、清能德创、汇川、禾川、新时达等.支持ethercat io模块: 雷赛,新洋等
Ø支持多达64轴控制,可方便实现龙门同步控制,多轴耦合运动控制。
Ø软件模块化设计,兼容扩展了多种应用工艺包。用户二次开发很方便。
Ø支持焊接工艺、摆焊接工艺、焊缝相机、码跺工艺、视觉工艺、多条同步带同步跟踪工艺。
Ø硬件基于ARM平台,采用linux操作系统(内置实时内核)。
Ø支持多种结构形式的机器人本体控制。传统串联六关节、ur结构、scara、delta并联。
Ø支持电机位置控制模式、速度控制模式,插补周期低至1ms
Ø支持多任务,工艺功能,简化编程操作简便。用户指令兼容FANUC机器人编程语言。
Ø支持圆弧插补、螺旋线、直线插补、关节插补、在线变位、在线变速度。
Ø支持连续插补速度前瞻
Ø提供sdk调用接口。
Ø上位机可以使用电脑、或示教器、或在本控制器上面直接开发上位机。
Ø元器件使用工业级别,工作温度-20℃到+70℃



以上是关于基于NXP i.MX8 Ethercat实时运动控制器设计 Linux+xenomai+igh+rtnet的主要内容,如果未能解决你的问题,请参考以下文章
基于NXP i.MX8M mini的新一代高性价比核心板之王
基于NXP i.MX8MM ARM核心板的全自动特定蛋白分析仪
基于ARM+FPGA低成本高实时Ethercat运动控制器解决方案