OpenCV 车辆识别 运动目标检测
Posted 我今年十六岁
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了OpenCV 车辆识别 运动目标检测相关的知识,希望对你有一定的参考价值。
目录
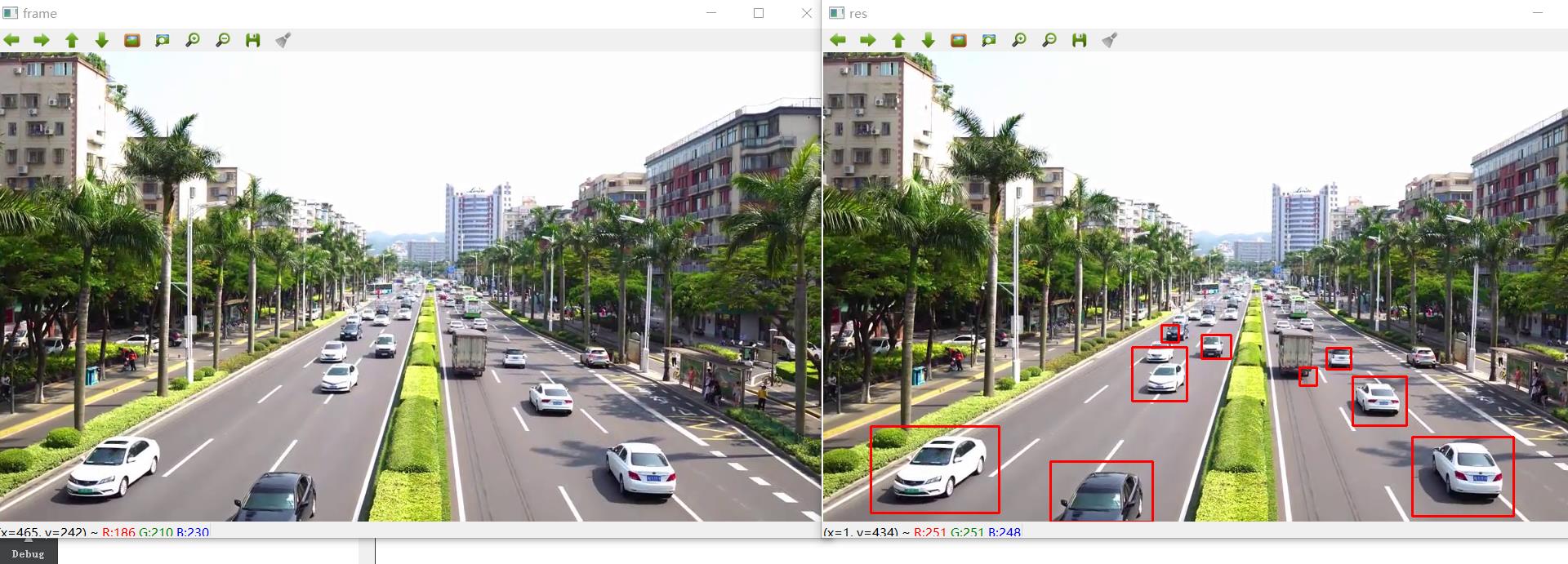
一:车辆识别成果展示
二:车辆识别超详细步骤解析
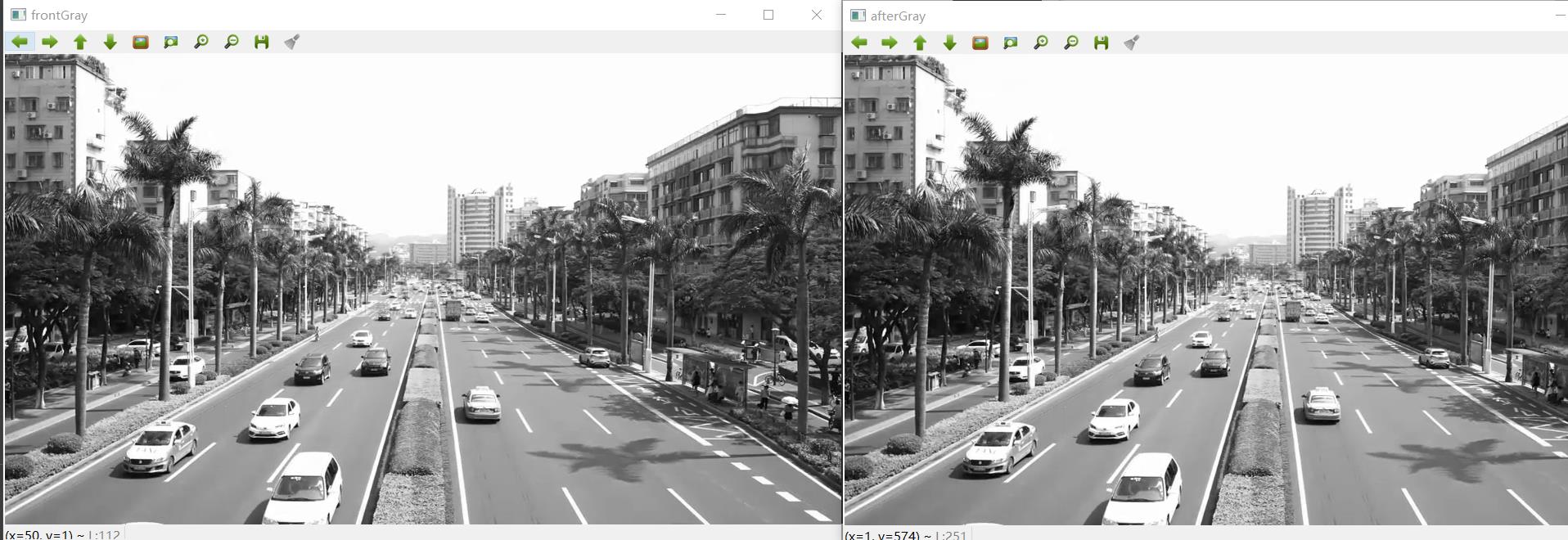
步骤一:灰度化处理
灰度处理目的 RGB三通道转灰度单通道 压缩到原图片三分之一大小
效果展示:【避免内存浪费 帧差法对前后帧图像灰度化处理】
//1 灰度处理 目的 RGB三通道转灰度单通道 压缩到原图片三分之一大小
cvtColor(frontFrame,frontGray,CV_RGB2GRAY);//前一帧灰度化处理
cvtColor(afterFrame,afterGray,CV_RGB2GRAY);//后一帧灰度化处理
//imshow("frontGray",frontGray);//测试
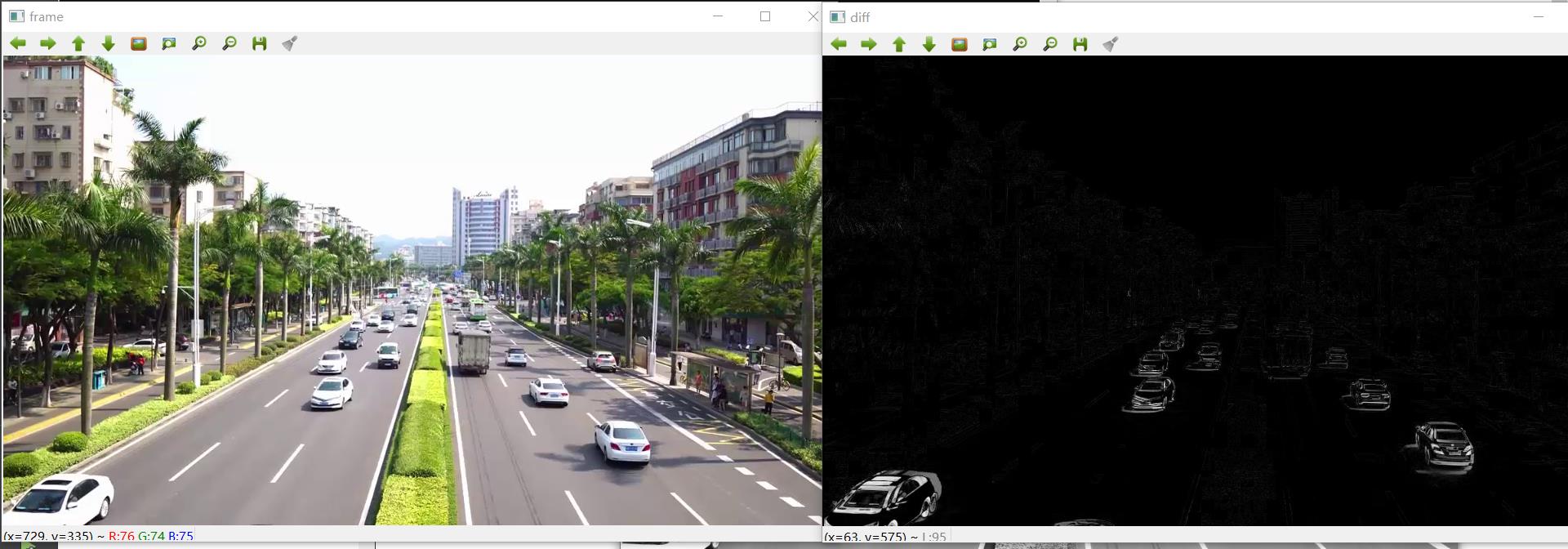
//imshow("afterGray",afterGray);//测试步骤二:帧差处理
帧差处理目的 找到帧与帧之间的差异(正在运动的物体)
效果展示:【运动目标的检测:运动事物显示灰度,静止事物显示黑度】
//2 帧差处理 目的 找到帧与帧之间的差异(正在运动的物体)
Mat diff;
Mat frontGray,afterGray;
absdiff(frontGray,afterGray,diff);//前后帧对比存于diff中
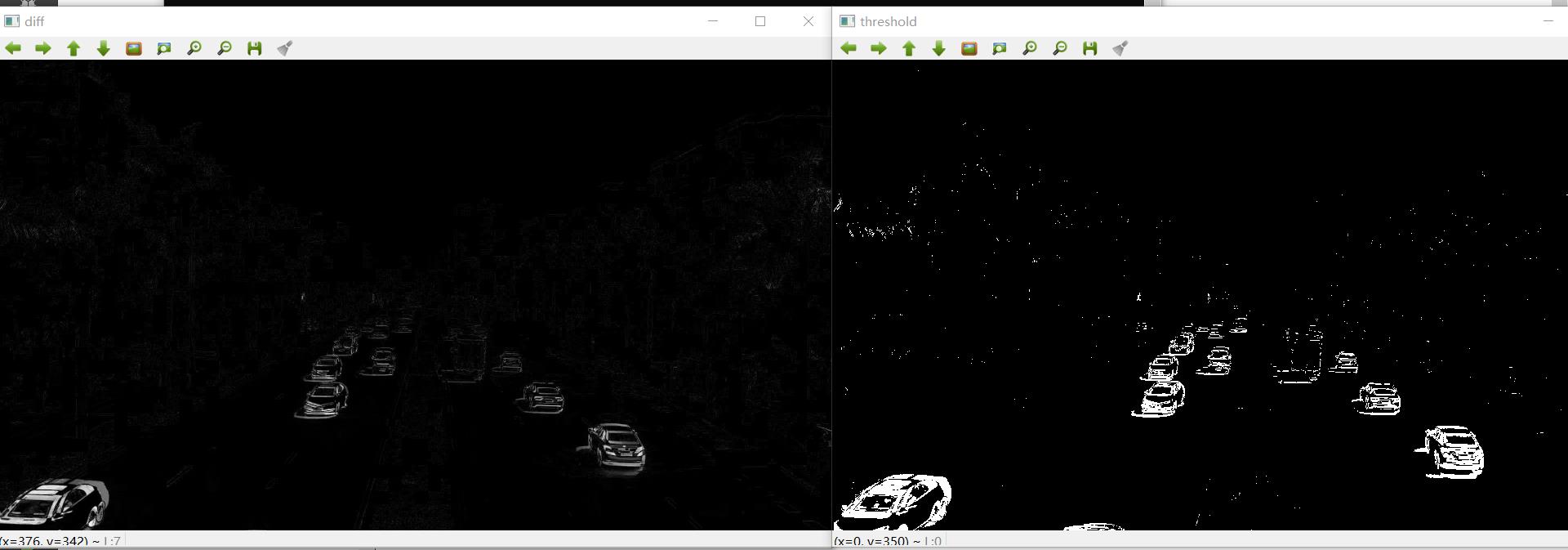
imshow("diff",diff);//测试步骤三:二值化处理
二值化处理 目的 将灰度图继续识别转换为黑白分明的图像
效果展示:【步骤二中运动事物显示灰度,静止事物显示黑度,在这里进行二值化处理,能够黑白分明,便于计算机识别运动目标,如下右图二值化处理后黑白分明】【缺点:存在白色噪点,如下右图除了车辆外后面的背景也显示白度,这就是白色噪点,需要去除】
//3 二值化处理 目的 将灰度图继续识别转换为黑白分明的图像
threshold(diff,diff,25,255,CV_THRESH_BINARY);
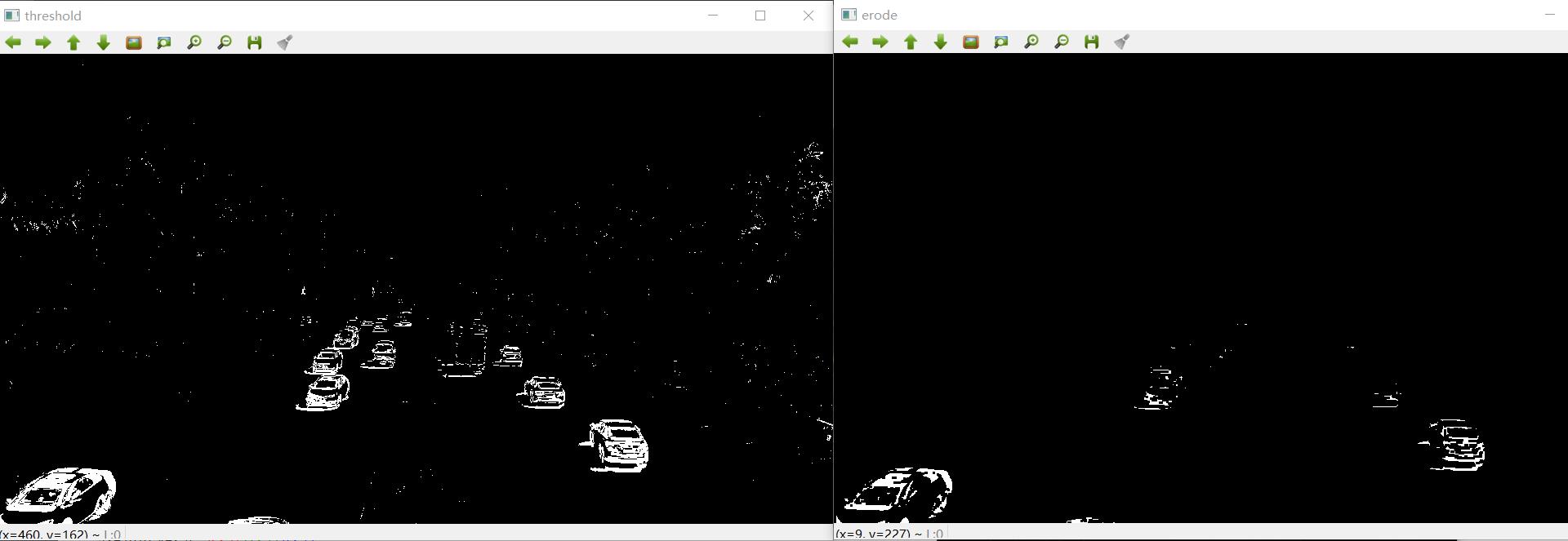
imshow("threshold",diff);//测试步骤四:图像降噪
4-1 腐蚀处理 目的 去除白色噪点
效果展示:【步骤三中存在的白色噪点能够去除,但是在去除白色噪点的同时,也影响了车辆的白度显示,如下右图可以看出,车辆白度显示有所降低,因此还是需要改进】
//4 图像降噪
//4-1 腐蚀处理 目的 去除白色噪点
Mat element = cv::getStructuringElement(MORPH_RECT,Size(3,3));//小于3*3方块的白色噪点都会被腐蚀
erode(diff,diff,element);
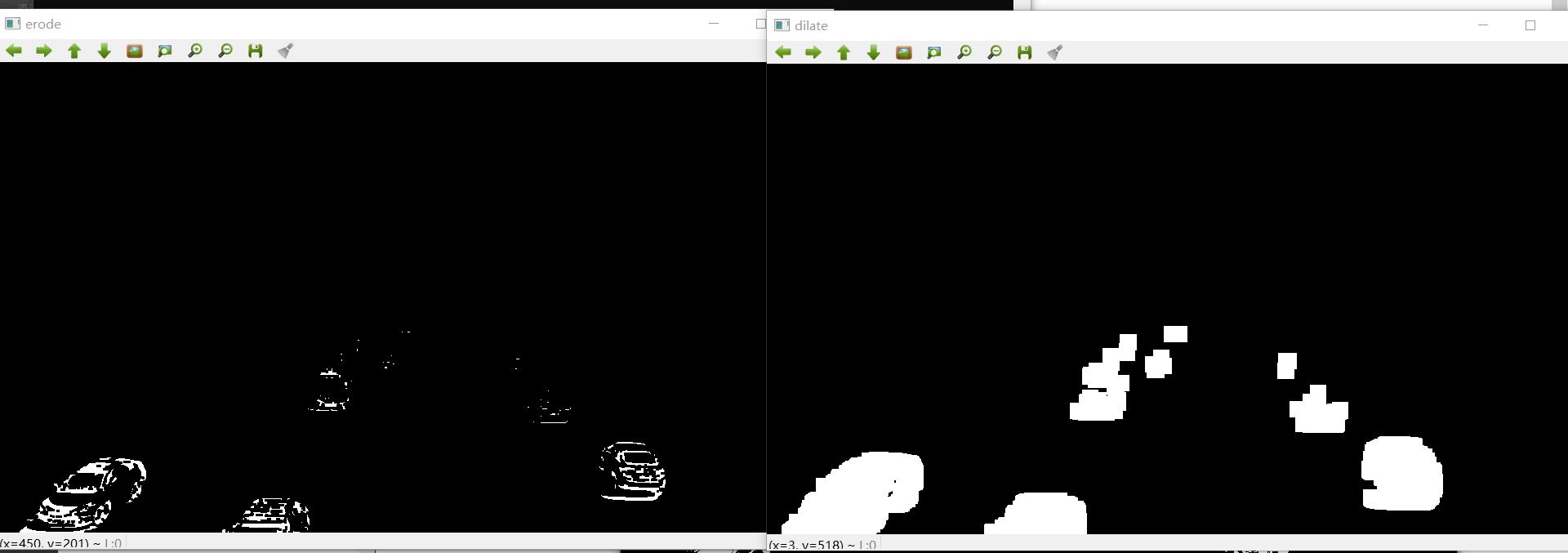
imshow("erode",diff);//测试4-2 膨胀处理 目的 把白色区域变大
效果展示:【如下右图,将车辆形状大致显示,便于框选车辆识别操作】
//4-2 膨胀 目的 把白色区域变大
Mat element2=cv::getStructuringElement(MORPH_RECT,Size(20,20));
dilate(diff,diff,element2);
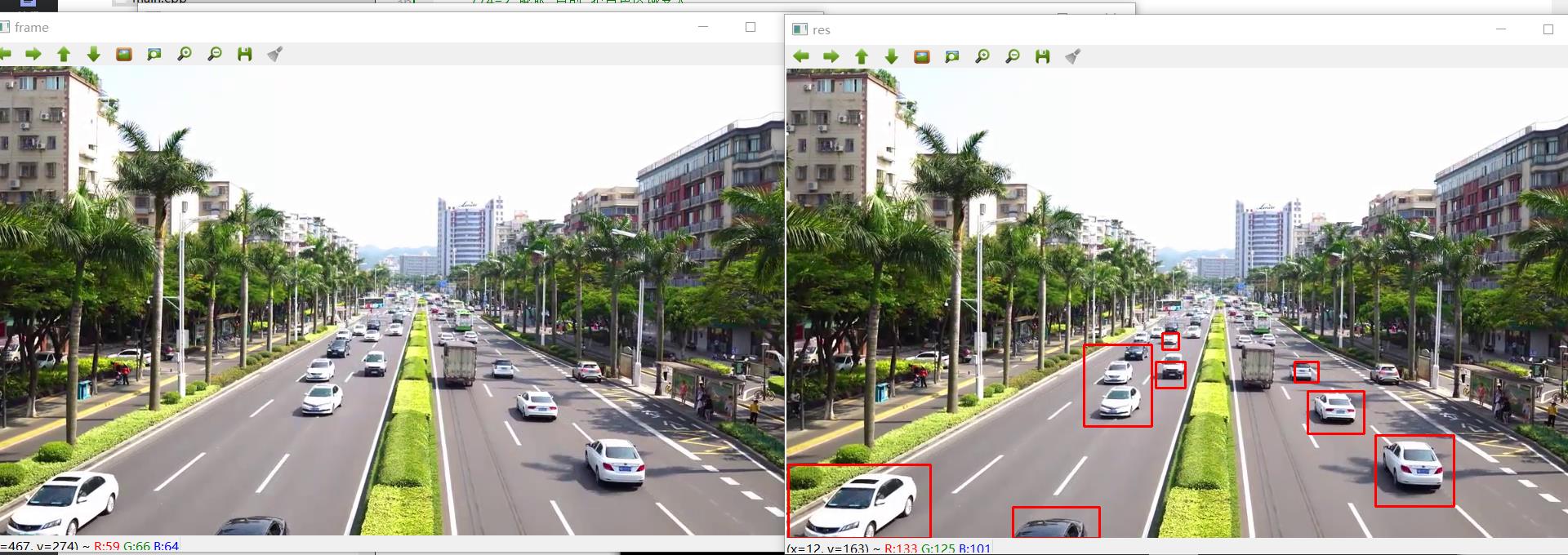
imshow("dilate",diff);//测试步骤五:提取关键点 框选运动目标检测
效果展示:车辆识别成功
//5 提取关键点
//5-1 查找特征点
vector<vector<Point>>contours;
findContours(diff,contours,CV_RETR_EXTERNAL,CV_CHAIN_APPROX_SIMPLE,Point(0,0));
//5-2 提取关键点
vector<vector<Point>>contours_poly(contours.size());
vector<Rect>boundRect(contours.size());
//5-3 确定下四个点来用于框选目标物体
int x,y,w,h;
int num=contours.size();
for(int i = 0;i < num;i++)
approxPolyDP(Mat(contours[i]),contours_poly[i],3,true);
//多边拟合
boundRect[i]=boundingRect(Mat(contours_poly[i]));
x=boundRect[i].x;
y=boundRect[i].y;
w=boundRect[i].width;
h=boundRect[i].height;
//绘制矩形
rectangle(resFrame,Point(x,y),Point(x+w,y+h),Scalar(0,0,255),2);
三:车辆识别完整代码
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
Mat moveCheck(Mat &frontFrame,Mat &afterFrame)
Mat resFrame,diff;
Mat frontGray,afterGray;
//克隆当前帧画面 返回最终结果
resFrame = afterFrame.clone();
//1 灰度处理 目的 RGB三通道转灰度单通道 压缩到原图片三分之一大小
cvtColor(frontFrame,frontGray,CV_RGB2GRAY);
cvtColor(afterFrame,afterGray,CV_RGB2GRAY);
//imshow("frontGray",frontGray);
//imshow("afterGray",afterGray);
//2 帧差处理 目的 找到帧与帧之间的差异(正在运动的物体)
absdiff(frontGray,afterGray,diff);
//imshow("diff",diff);
//3 二值化处理 目的 将灰度图继续识别转换为黑白分明的图像
threshold(diff,diff,25,255,CV_THRESH_BINARY);
//imshow("threshold",diff);
//4 图像降噪
//4-1 腐蚀处理 目的 去除白色噪点
Mat element = cv::getStructuringElement(MORPH_RECT,Size(3,3));//小于3*3方块的白色噪点都会被腐蚀
erode(diff,diff,element);
//imshow("erode",diff);
//4-2 膨胀 目的 把白色区域变大
Mat element2=cv::getStructuringElement(MORPH_RECT,Size(20,20));
dilate(diff,diff,element2);
//imshow("dilate",diff);
//5 提取关键点
//5-1 查找特征点
vector<vector<Point>>contours;
findContours(diff,contours,CV_RETR_EXTERNAL,CV_CHAIN_APPROX_SIMPLE,Point(0,0));
//5-2 提取关键点
vector<vector<Point>>contours_poly(contours.size());
vector<Rect>boundRect(contours.size());
//5-3 确定下四个点来用于框选目标物体
int x,y,w,h;
int num=contours.size();
for(int i = 0;i < num;i++)
approxPolyDP(Mat(contours[i]),contours_poly[i],3,true);
//多边拟合
boundRect[i]=boundingRect(Mat(contours_poly[i]));
x=boundRect[i].x;
y=boundRect[i].y;
w=boundRect[i].width;
h=boundRect[i].height;
//绘制矩形
rectangle(resFrame,Point(x,y),Point(x+w,y+h),Scalar(0,0,255),2);
return resFrame;
int main(int argc, char *argv[])
Mat frame;
Mat temp;
Mat res;
int count = 0;
VideoCapture cap("D:/00000000000003jieduanshipincailliao/carMove.mp4");//视频路径
while (cap.read(frame))
count++;
if(count == 1)
res = moveCheck(frame,frame);
else
res = moveCheck(temp,frame);
imshow("frame",frame);
imshow("res",res);//最终车辆识别成果
temp = frame.clone();
waitKey(15);
return 0;
当然,夜晚的车辆也能够正常识别
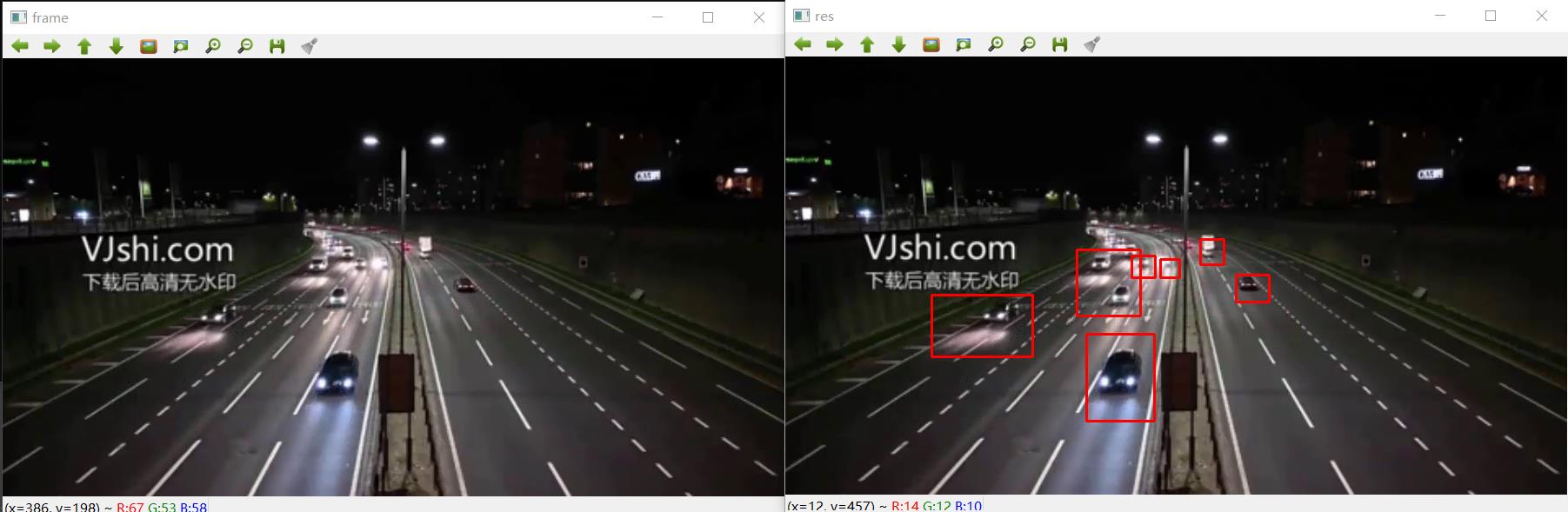
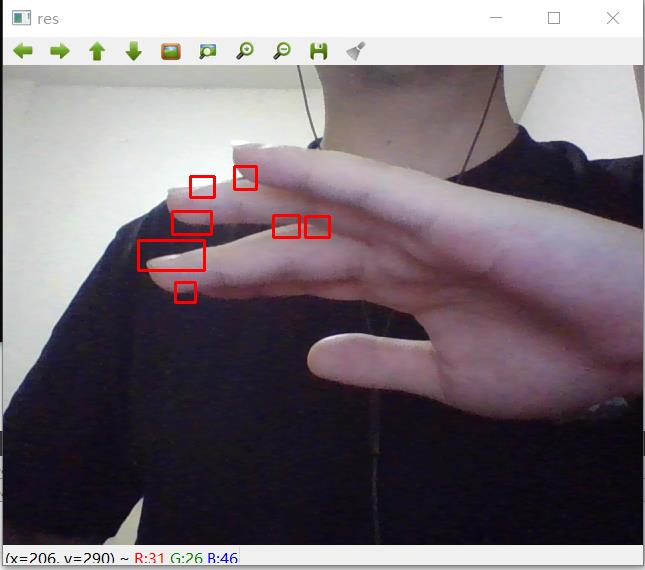
不过,本次的帧差法的车辆识别存在弊端,只要是运动的物体都会识别,比如,博主打开摄像头,动一动手指头,也会被框选识别,因此是有一定弊端的
不过,这种帧差法的运动目标检测,在夜晚监控中是非常广泛地应用到,因为有任何的风吹草动,都会被框选识别。
以上是关于OpenCV 车辆识别 运动目标检测的主要内容,如果未能解决你的问题,请参考以下文章
OpenCV车辆识别 目标检测 级联分类器 C++ 案例实现