目标检测与识别车辆信息原理与实践详解
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了目标检测与识别车辆信息原理与实践详解相关的知识,希望对你有一定的参考价值。
目标检测与识别车辆信息是一种应用广泛的技术,它可以帮助我们更好地了解道路交通状况,提高交通安全性。在本文中,我将详细介绍目标检测与识别车辆信息的工作原理、应用场景、挑战和未来发展方向。
一、目标检测与识别车辆信息的工作原理
目标检测是计算机视觉中的一个重要研究领域,它的任务是从图像或视频中找到并标注出其中的目标物体。而识别车辆信息则是在目标检测的基础上,对于车辆进行进一步的分析和识别,例如车辆的类型、颜色、速度等等。
目标检测与识别车辆信息的实现,通常涉及到以下几个步骤:
-
图像或视频的采集:这是整个目标检测与识别车辆信息的第一步,需要使用摄像头或其他相关设备对道路交通情况进行拍摄,以获取相关的图像或视频数据。
-
图像或视频的预处理:在进行目标检测与识别车辆信息之前,需要对采集到的图像或视频进行预处理,包括图像去噪、图像增强、图像尺寸调整等。
-
目标检测:在预处理之后,需要使用目标检测算法对图像或视频中的目标物体进行检测,这个过程通常涉及到图像特征提取、目标框定位、目标区域的提取等步骤。
-
车辆信息的识别:在完成目标检测之后,需要对检测到的车辆目标进行信息的识别和分析,这个过程通常涉及到车辆类型分类、车辆颜色识别、车速估计等步骤。
-
结果输出和可视化:最后,需要将检测和识别的结果输出并进行可视化展示,以方便用户进行实时监控和分析。

二、目标检测与识别车辆信息的应用场景
目标检测与识别车辆信息的应用场景非常广泛,例如:
-
交通监控系统:目标检测与识别车辆信息可以帮助交通监控系统实时监测路况,及时发现交通事故或拥堵情况,并给出相应的预警提示,以提高道路交通安全性。
-
智能停车系统:目标检测与识别车辆信息可以帮助智能停车系统实现自动寻找停车位、自动导航等功能,提高停车效率和用户体验。
-
无人驾驶
-
识别车辆信息在无人驾驶领域也扮演着重要角色,可以通过识别周围车辆、行人等障碍物,实现自动避障和自动驾驶等功能。
下面我们来举例介绍一下基于深度学习的目标检测和车辆信息识别的实现。我们使用的是一种常用的深度学习框架——TensorFlow,同时使用了YOLOv3算法来进行目标检测,使用了OpenCV库进行图像处理和可视化。
识别车辆信息在无人驾驶领域也扮演着重要角色,可以通过识别周围车辆、行人等障碍物,实现自动避障和自动驾驶等功能。
下面我们来举例介绍一下基于深度学习的目标检测和车辆信息识别的实现。我们使用的是一种常用的深度学习框架——TensorFlow,同时使用了YOLOv3算法来进行目标检测,使用了OpenCV库进行图像处理和可视化。
import cv2
import numpy as np
def load_image(image_path):
# 加载图像
image = cv2.imread(image_path)
# 将图像大小调整为网络输入的大小
image = cv2.resize(image, (416, 416))
# 将图像转换为浮点类型并归一化
image = image.astype(np.float32) / 255.0
# 将图像增加一个维度,变成一个batch
image = np.expand_dims(image, axis=0)
return image
接下来,我们需要加载YOLOv3的网络模型,并对图像进行目标检测。具体代码如下所示:
import tensorflow as tf
# 加载模型
model = tf.keras.models.load_model(yolov3.h5)
# 加载图像
image = load_image(test.jpg)
# 进行目标检测
boxes, scores, classes = model.predict(image)
在上述代码中,我们使用了tensorflow的keras模块来加载YOLOv3的网络模型,并使用该模型进行目标检测。我们将检测到的目标框、得分和类别分别存储在了boxes、scores和classes三个变量中。
最后,我们需要对检测到的车辆目标进行信息识别和分析。具体代码如下所示:
# 车辆类型分类
vehicle_types = [car, bus, truck, motorbike]
vehicle_boxes = []
for i in range(len(boxes)):
if classes[i] in [0, 1, 2, 3]:
vehicle_boxes.append(boxes[i])
vehicle_boxes = np.array(vehicle_boxes)
vehicle_scores = scores[:len(vehicle_boxes)]
vehicle_classes = classes[:len(vehicle_boxes)]
vehicle_types = [vehicle_types[vehicle_classes[i]] for i in range(len(vehicle_classes))]
# 可视化结果
image = cv2.imread(test.jpg)
for i in range(len(vehicle_boxes)):
box = vehicle_boxes[i]
cv2.rectangle(image, (int(box[0]), int(box[1])), (int(box[2]), int(box[3])), (255, 0, 0), 2)
cv2.putText(image, vehicle_types[i, (int(box[0]), int(box[1])-10), cv2.FONT_HERSHEY_SIMPLEX, 0.9, (255, 0, 0), 2)
cv2.imshow(Result, image)
cv2.waitKey(0)
在上述代码中,我们首先定义了一个包含车辆类型的列表vehicle_types,然后从检测到的目标中筛选出车辆目标,并将其框框出来,同时将其类型信息添加到图像上。最后,我们使用OpenCV库将结果可视化输出。


此外,目标检测和识别车辆信息技术还可以应用于城市交通管理领域。例如,在城市交通监控中,通过识别车辆信息可以统计车流量、分析交通拥堵情况、优化信号灯控制等,从而提高城市交通的效率和安全性。在智慧城市建设中,这一技术也可以用于智能停车系统的实现,通过识别车辆信息可以实现车位的自动识别和管理,避免停车难的问题。
在无人驾驶领域,目标检测和识别车辆信息技术更是不可或缺。无人驾驶车辆需要准确地识别周围的车辆和行人,并做出相应的决策,从而保证行车的安全性和效率。而这正是目标检测和识别车辆信息技术的优势所在。通过这一技术,无人驾驶车辆可以实现对周围车辆的精确识别和跟踪,从而避免事故的发生。
综上所述,目标检测和识别车辆信息技术在智能交通、城市交通管理和无人驾驶等领域都有着广泛的应用前景,可以为我们的生活带来更多便利和安全性。
行人车辆检测与计数系统(Python+YOLOv5深度学习模型+清新界面)
 行人车辆检测与计数系统用于交通路口行人及车辆检测计数,道路人流量、车流量智能监测,方便记录、显示、查看和保存检测结果。本文详细介绍行人车辆检测,在介绍算法原理的同时,给出Python的实现代码、PyQt的UI界面以及训练数据集。在界面中可以选择各种行人车辆图片、视频进行检测识别与计数;可对图像中存在的多个目标进行识别分类。博文提供了完整的Python代码和使用教程,适合新入门的朋友参考,完整代码资源文件请转至文末的下载链接。
行人车辆检测与计数系统用于交通路口行人及车辆检测计数,道路人流量、车流量智能监测,方便记录、显示、查看和保存检测结果。本文详细介绍行人车辆检测,在介绍算法原理的同时,给出Python的实现代码、PyQt的UI界面以及训练数据集。在界面中可以选择各种行人车辆图片、视频进行检测识别与计数;可对图像中存在的多个目标进行识别分类。博文提供了完整的Python代码和使用教程,适合新入门的朋友参考,完整代码资源文件请转至文末的下载链接。

摘要:行人车辆检测与计数系统用于交通路口行人及车辆检测计数,道路人流量、车流量智能监测,方便记录、显示、查看和保存检测结果。本文详细介绍行人车辆检测,在介绍算法原理的同时,给出Python的实现代码、PyQt的UI界面以及训练数据集。在界面中可以选择各种行人车辆图片、视频进行检测识别与计数;可对图像中存在的多个目标进行识别分类。博文提供了完整的Python代码和使用教程,适合新入门的朋友参考,完整代码资源文件请转至文末的下载链接。本博文目录如下:
完整代码下载:https://mbd.pub/o/bread/ZJaXlJ5w
参考视频演示:https://www.bilibili.com/video/BV1mT411r7hq/
离线依赖库下载:https://pan.baidu.com/s/1hW9z9ofV1FRSezTSj59JSg?pwd=oy4n (提取码:oy4n )
前言
行人车辆检测是近年来计算机视觉领域的研究热点,同时也是目标检测领域中的难点。其目的是识别和定位图像中存在的行人,在许多领域中都有广泛的应用。交通安全方面,无人驾驶汽车通过提前检测到行人及时避让来避免交通事故的发生;安防保护方面,通过行人检测来防止可疑人员进入;公共场所管理方面,通过行人和车辆检测统计人流量、车流量数据,优化人力物力等资源的分配。
考虑对交通路口行人车辆的检测很多,前面博主也发布过实时车辆行人多目标检测与跟踪系统-上篇(UI界面清新版,Python代码)和基于深度学习的车辆检测系统(MATLAB代码,含GUI界面)等博文。近期我想到可以将模型识别到的行人、小汽车、卡车、自行车、公交、摩托车等进行计数统计,观测画面中各种类型车辆的数目。系统对于图片、视频和摄像头捕获的实时画面,检测画面中的行人及车辆并统计数目,系统支持结果记录、展示和保存,每次检测的结果记录在表格中,另外采用登录注册进行用户管理。对此这里给出博主设计的新款界面,以前都是浅色系背景,这回弄了个深色背景,功能也可以满足图片、视频和摄像头的识别检测,希望大家可以喜欢,初始界面如下图:
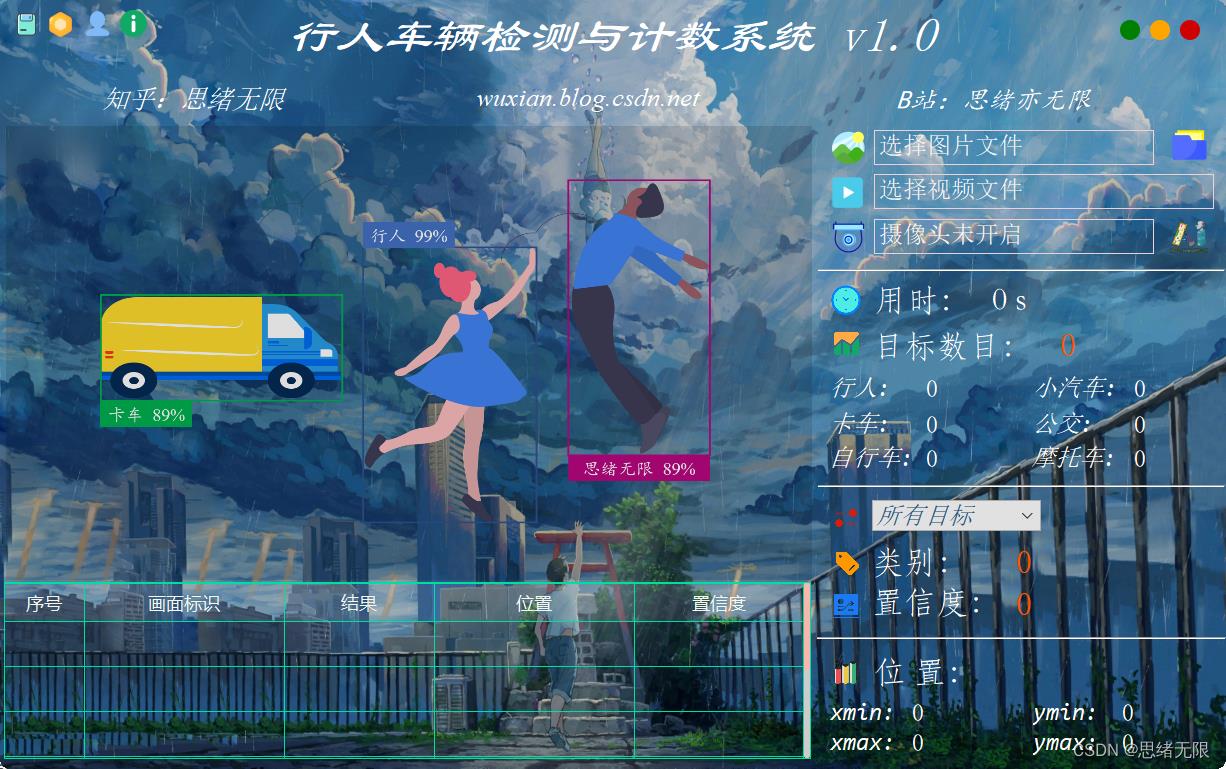
检测类别时的界面截图(点击图片可放大)如下图,可识别画面中存在的多个类别并计数,也可开启摄像头或视频检测:

详细的功能演示效果参见博主的B站视频或下一节的动图演示,觉得不错的朋友敬请点赞、关注加收藏!系统UI界面的设计工作量较大,界面美化更需仔细雕琢,大家有任何建议或意见和可在下方评论交流。
1. 效果演示
系统界面设计上采用了许多美化技巧,首先我们还是通过动图看一下系统的效果,主要实现的功能是对图片、视频和摄像头画面中的行人车辆进行识别,识别的结果可视化显示在界面和图像中,另外提供多个行人车辆的显示选择功能,演示效果如下。
(一)系统介绍
行人车辆检测与计数系统主要用于日常道路行人及车辆等目标的智能监测,对路口常见的目标包括行人、小汽车、卡车、公交、自行车、摩托车等目标进行计数,以方便对交通情况分析;系统提供登录注册功能,可进行用户管理;能够有效识别图片、视频等文件形式,检测目标位置、类别并统计各类别计数结果;可开启摄像头实时检测和统计路口行人车辆数目,支持结果记录、展示和保存。
(二)主要特点
(1)YOLO v5算法实现,模型一键切换更新;
(2)检测图片、视频等图像中的各目标数目;
(3)摄像头监控实时检测,便携展示、记录和保存;
(4)支持用户登录、注册,检测结果可视化功能;
(5)提供数据集和训练代码可重新训练;
(三)用户注册登录界面
这里设计了一个登录界面,可以注册账号和密码,然后进行登录。这里的登录比较简单,提供一个从登录到主界面的跳转功能,并没有涉及数据库等操作。

(四)选择图片识别
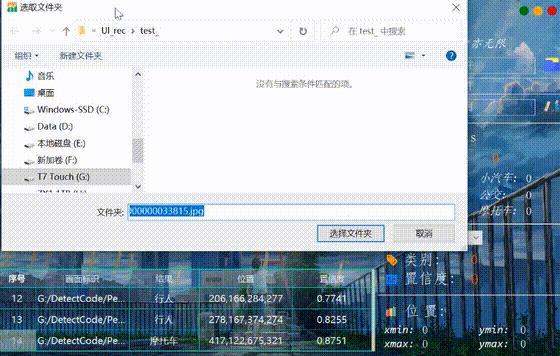
系统主界面可以选择图片文件进行识别,点击图片选择按钮图标选择图片后,显示所有识别的结果,可通过下拉选框查看单个结果,以便单独显示某一特定目标。本功能的界面展示如下图所示:
(五)视频识别效果展示
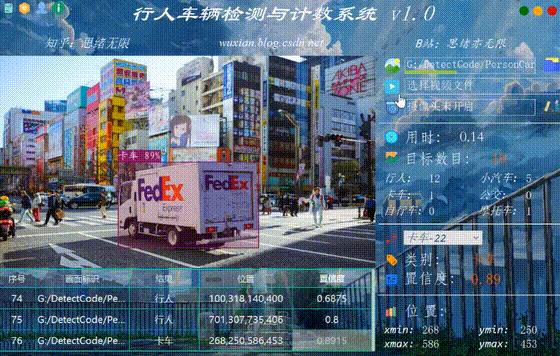
若需识别一段视频中的行人及车辆,这里可以点击视频按钮可选择待检测的视频,系统会自动解析视频逐帧识别交通道路,并将人流量、车流量的结果记录在下方表格中,效果如下图所示:
(六)摄像头检测效果展示
在真实场景中,我们往往利用道路的摄像头获取实时画面,同时需要对画面中的行人及车辆进行识别,因此本文考虑到此项功能。如下图所示,点击摄像头按钮后系统进入准备状态,系统显示实时画面并开始检测画面中的行人及车辆,识别结果展示如下图:

2. 算法原理与数据集
(一)YOLOv5算法
从最终效果来看YOLOv5已经相当优秀,是发展的比较完备、使用比较广泛的一个版本;而更重要的是YOLOv5的调用、训练和预测都十分方便。YOLOv5的另一个特点就是它为不同的设备需求和不同的应用场景提供了大小和参数数量不同的网络。
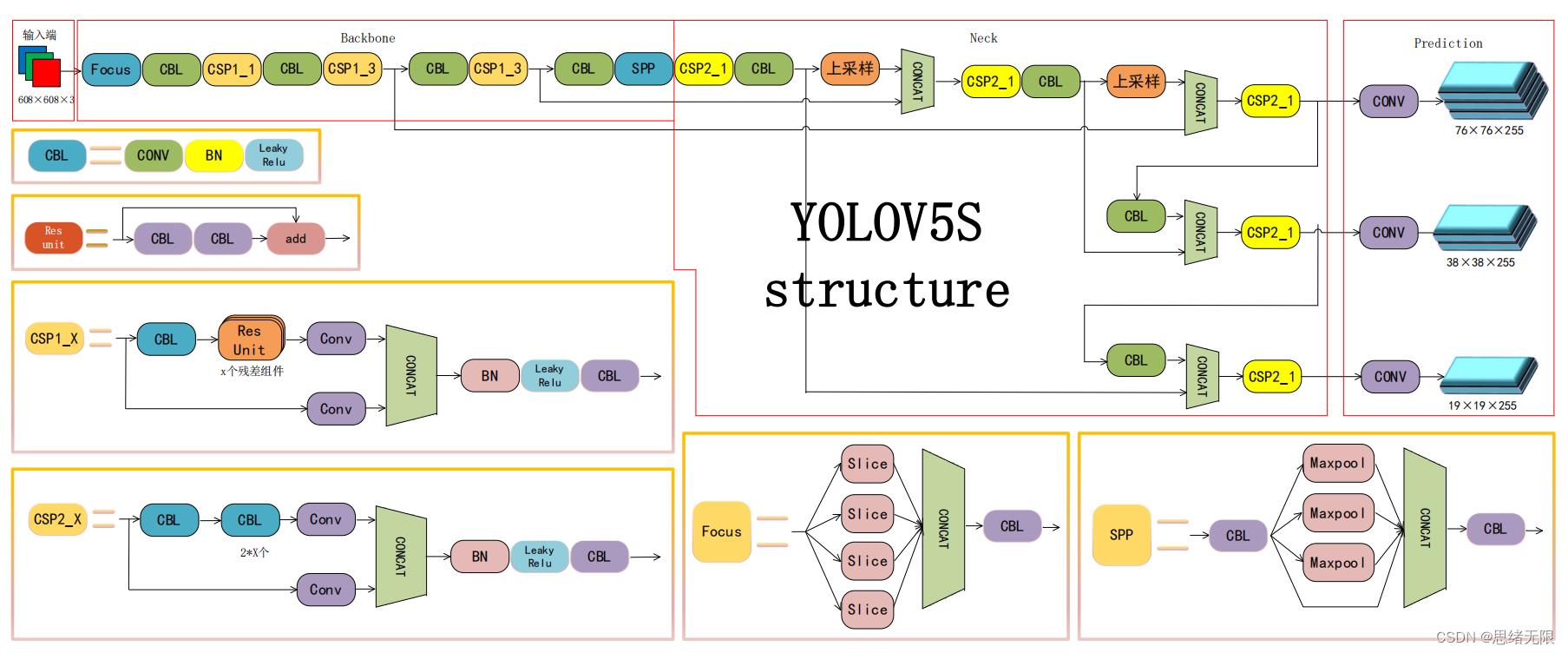
(1)主干部分:使用了Focus网络结构,具体操作是在一张图片中每隔一个像素拿到一个值,这个时候获得了四个独立的特征层,然后将四个独立的特征层进行堆叠,此时宽高信息就集中到了通道信息,输入通道扩充了四倍。该结构在YoloV5第5版之前有所应用,最新版本中未使用。
(2)数据增强:Mosaic数据增强、Mosaic利用了四张图片进行拼接实现数据中增强,根据论文所说其拥有一个巨大的优点是丰富检测物体的背景!且在BN计算的时候一下子会计算四张图片的数据!
(3)多正样本匹配:在之前的Yolo系列里面,在训练时每一个真实框对应一个正样本,即在训练时,每一个真实框仅由一个先验框负责预测。YoloV5中为了加快模型的训练效率,增加了正样本的数量,在训练时,每一个真实框可以由多个先验框负责预测。
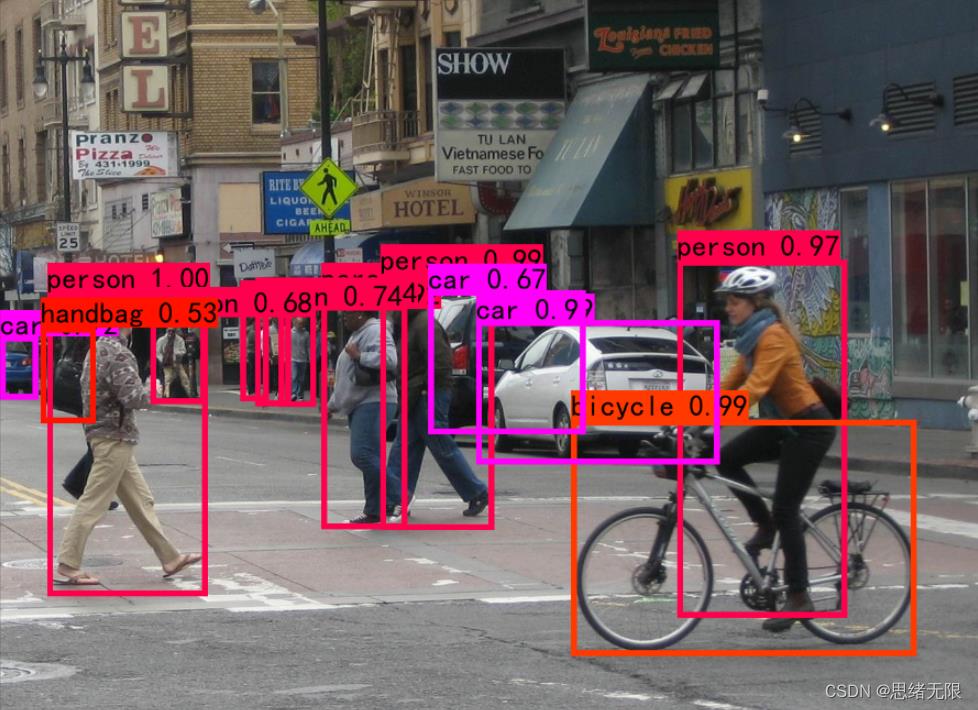
下图是YoloV5经过非极大值抑制在COCO数据集上的人、车图片测试结果。
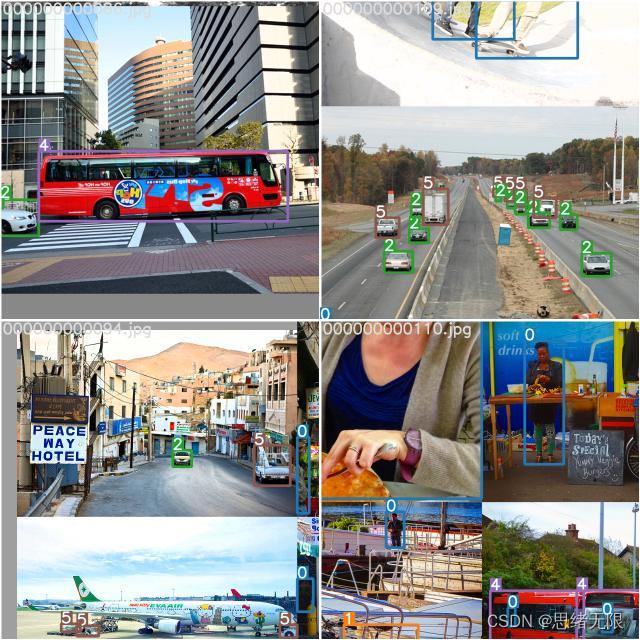
(二)行人车辆数据集
这里我们使用的行人车辆数据集,是从COCO和VOC数据集中抽取的包含行人、小汽车、卡车、公交、自行车、摩托车等类别的图像数据,每张图片除包括类别标签外,还有一个标注的物体边框(Bounding Box)。组成的训练数据集包含2856张图片,验证集1343张图片,共计4199张图片。
Chinese_name = \'person\': "行人", \'bicycle\': \'自行车\', \'car\': \'小汽车\', \'motorcycle\': \'摩托车\',
\'bus\': \'公交车\', \'truck\': \'卡车\', \'train\': \'火车\'
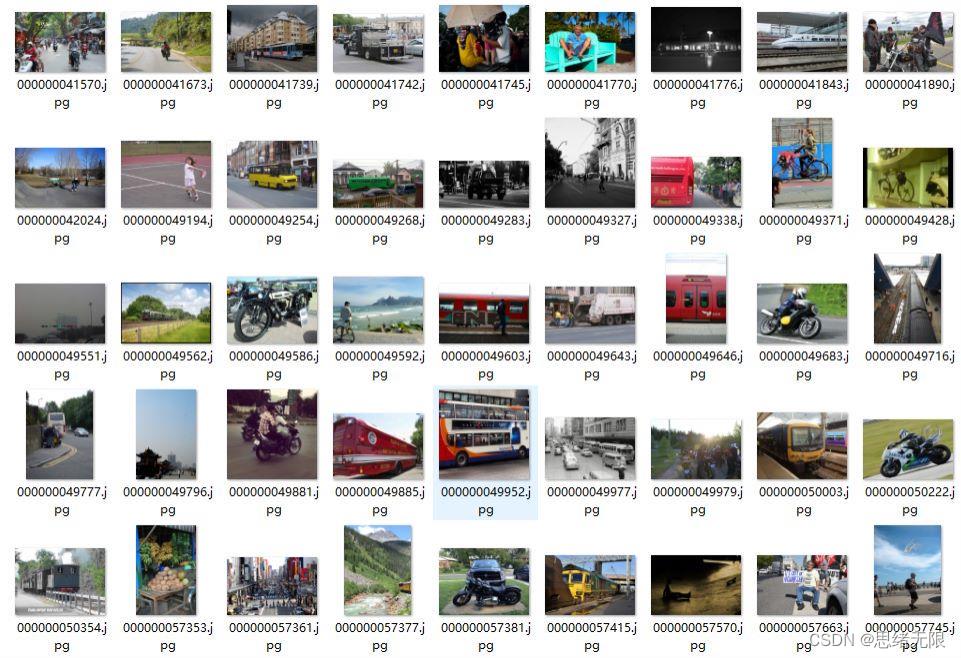
每张图像均提供了图像类标记信息,图像中行人及车辆的bounding box,行人及车辆的关键part信息,以及行人及车辆的属性信息,数据集并解压后得到如下的图片。
3. 行人车辆检测与计数系统
(一)训练过程
数据集准备好,接下来可执行训练程序,首先要安装本系统所需的依赖库,配置一个Python3.8然后按照requirements.txt里面的依赖装环境就可以运行了。
#请按照给定的python版本配置环境,否则可能会因依赖不兼容而出错
conda create -n env_rec python=3.8
#激活环境
activate env_rec
#使用pip安装所需的以来,可通过requirements.txt
pip install -r requirements.txt
YOLOv5是通过yaml格式的配置文件来找到对应的训练测试数据,因此在训练前需要对该文件进行简单配置。这里我们为此数据集配置好的yaml文件如下所示:
train: ./PersonCar/images/train
val: ./PersonCar/images/val
nc: 7
names: [\'person\', \'bicycle\', \'car\', \'motorcycle\', \'bus\', \'truck\', \'train\']
我们可以在终端输入如下命令进行训练,当然也可以直接点击train.py运行。
python train.py --batch 32 --epochs 300
(二)行人车辆预测
在训练完成后得到最佳模型,接下来我们将帧图像输入到这个网络进行预测,从而得到预测结果,预测方法(predict.py)部分的代码如下所示。
"""运行本项目需要python3.8及以下依赖库(完整库见requirements.txt):
opencv-python==4.5.5.64
tensorflow==2.9.1
PyQt5==5.15.6
scikit-image==0.19.3
torch==1.8.0
keras==2.9.0
Pillow==9.0.1
scipy==1.8.0
点击运行主程序runMain.py,程序所在文件夹路径中请勿出现中文
"""
def predict(img):
img = torch.from_numpy(img).to(device)
img = img.half() if half else img.float()
img /= 255.0
if img.ndimension() == 3:
img = img.unsqueeze(0)
t1 = time_synchronized()
pred = model(img, augment=False)[0]
pred = non_max_suppression(pred, opt.conf_thres, opt.iou_thres, classes=opt.classes,
agnostic=opt.agnostic_nms)
t2 = time_synchronized()
InferNms = round((t2 - t1), 2)
return pred, InferNms
pred, useTime = predict(img)
det = pred[0]
p, s, im0 = None, \'\', img0
if det is not None and len(det): # 如果有检测信息则进入
det[:, :4] = scale_coords(img.shape[1:], det[:, :4], im0.shape).round() # 把图像缩放至im0的尺寸
number_i = 0 # 类别预编号
detInfo = []
for *xyxy, conf, cls in reversed(det): # 遍历检测信息
c1, c2 = (int(xyxy[0]), int(xyxy[1])), (int(xyxy[2]), int(xyxy[3]))
# 将检测信息添加到字典中
detInfo.append([names[int(cls)], [c1[0], c1[1], c2[0], c2[1]], \'%.2f\' % conf])
number_i += 1 # 编号数+1
label = \'%s %.2f\' % (names[int(cls)], conf)
# 画出检测到的目标物
plot_one_box(image, xyxy, label=label, color=colors[int(cls)])
# 实时显示检测画面
cv2.imshow(\'Stream\', image)
image = cv2.resize(image, (vw, vh))
得到预测结果我们便可以将帧图像中的行人车辆框出,然后在图片上用opencv绘图操作,输出行人车辆的的类别及行人车辆的预测分数。以下是读取一个行人车辆图片并进行检测的脚本,首先将图片数据进行预处理后送predict进行检测,然后计算标记框的位置并在图中标注出来。

跑通了这个预测程序,我们可以将其封装到界面中,利用PyQt5设计一个UI界面,在运行图片、视频检测时调用这个方法。博主对整个系统进行了详细测试,最终开发出一版流畅得到清新界面,就是博文演示部分的展示,完整的UI界面、测试图片视频、代码文件,以及Python离线依赖包(方便安装运行,也可自行配置环境),均已打包上传,感兴趣的朋友可以通过参考文章里面给出的下载链接或B站视频简介处的下载链接获取。
下载链接
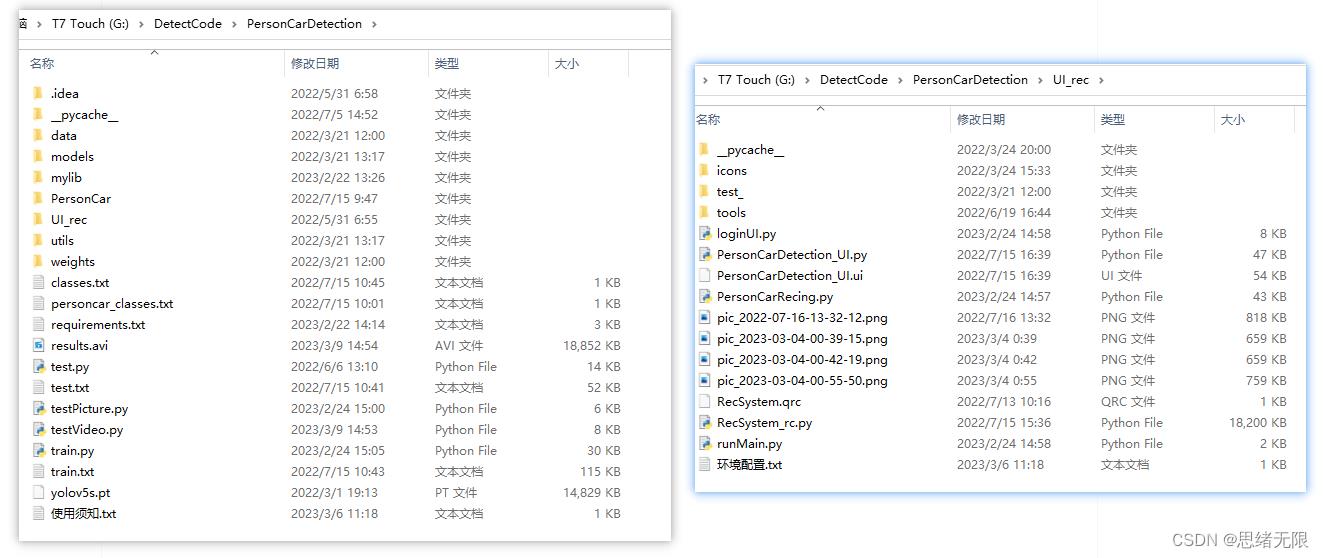
若您想获得博文中涉及的实现完整全部程序文件(包括测试图片、视频,py, UI文件等,如下图),这里已打包上传至博主的面包多平台,见可参考博客与视频,已将所有涉及的文件同时打包到里面,点击即可运行,完整文件截图如下:
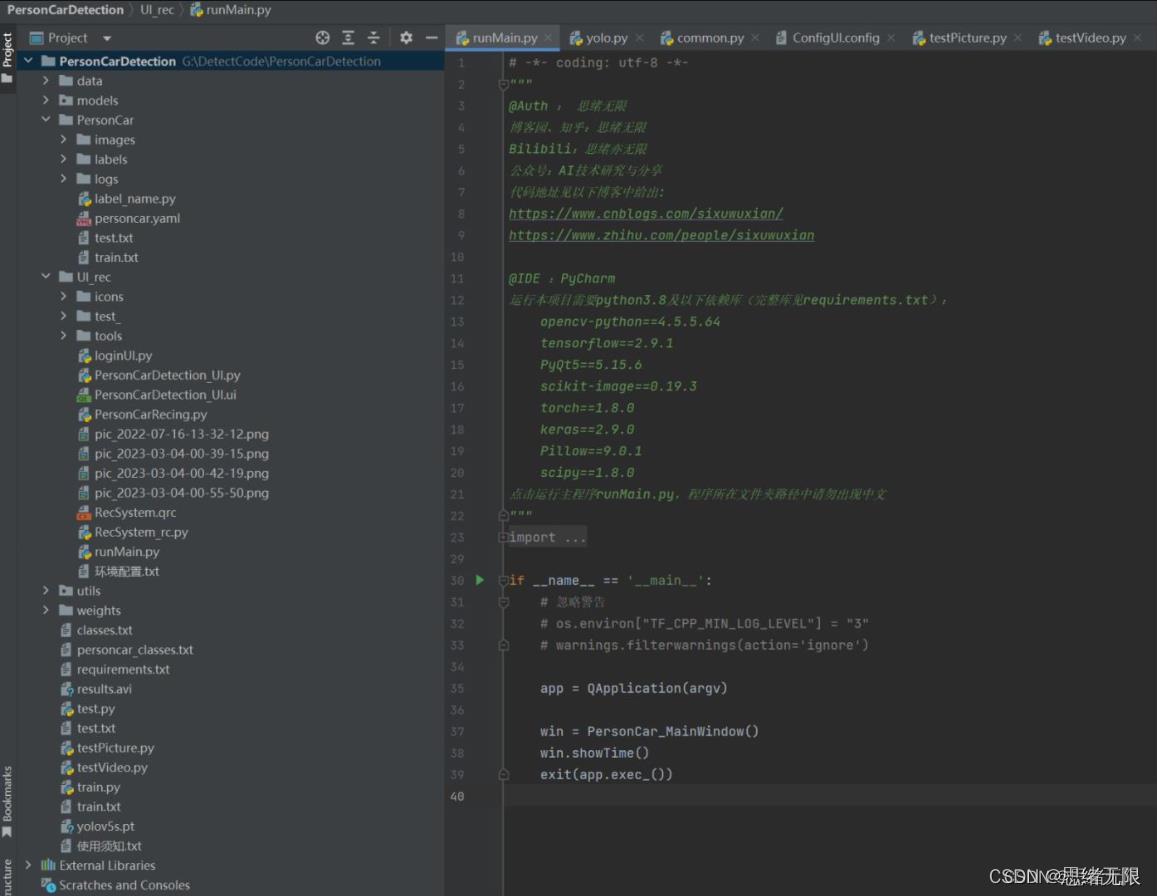
在文件夹下的资源显示如下,下面的链接中也给出了Python的离线依赖包,读者可在正确安装Anaconda和Pycharm软件后,复制离线依赖包至项目目录下进行安装,离线依赖的使用详细演示也可见本人B站视频:win11从头安装软件和配置环境运行深度学习项目、Win10中使用pycharm和anaconda进行python环境配置教程。
注意:该代码采用Pycharm+Python3.8开发,经过测试能成功运行,运行界面的主程序为runMain.py和LoginUI.py,测试图片脚本可运行testPicture.py,测试视频脚本可运行testVideo.py。为确保程序顺利运行,请按照requirements.txt配置Python依赖包的版本。Python版本:3.8,请勿使用其他版本,详见requirements.txt文件;
完整资源中包含数据集及训练代码,环境配置与界面中文字、图片、logo等的修改方法请见视频,项目完整文件下载请见参考博客文章里面,或参考视频的简介处给出:➷➷➷
完整代码下载:https://mbd.pub/o/bread/ZJaXlJ5w
参考视频演示:https://www.bilibili.com/video/BV1mT411r7hq/
离线依赖库下载:https://pan.baidu.com/s/1hW9z9ofV1FRSezTSj59JSg?pwd=oy4n (提取码:oy4n )
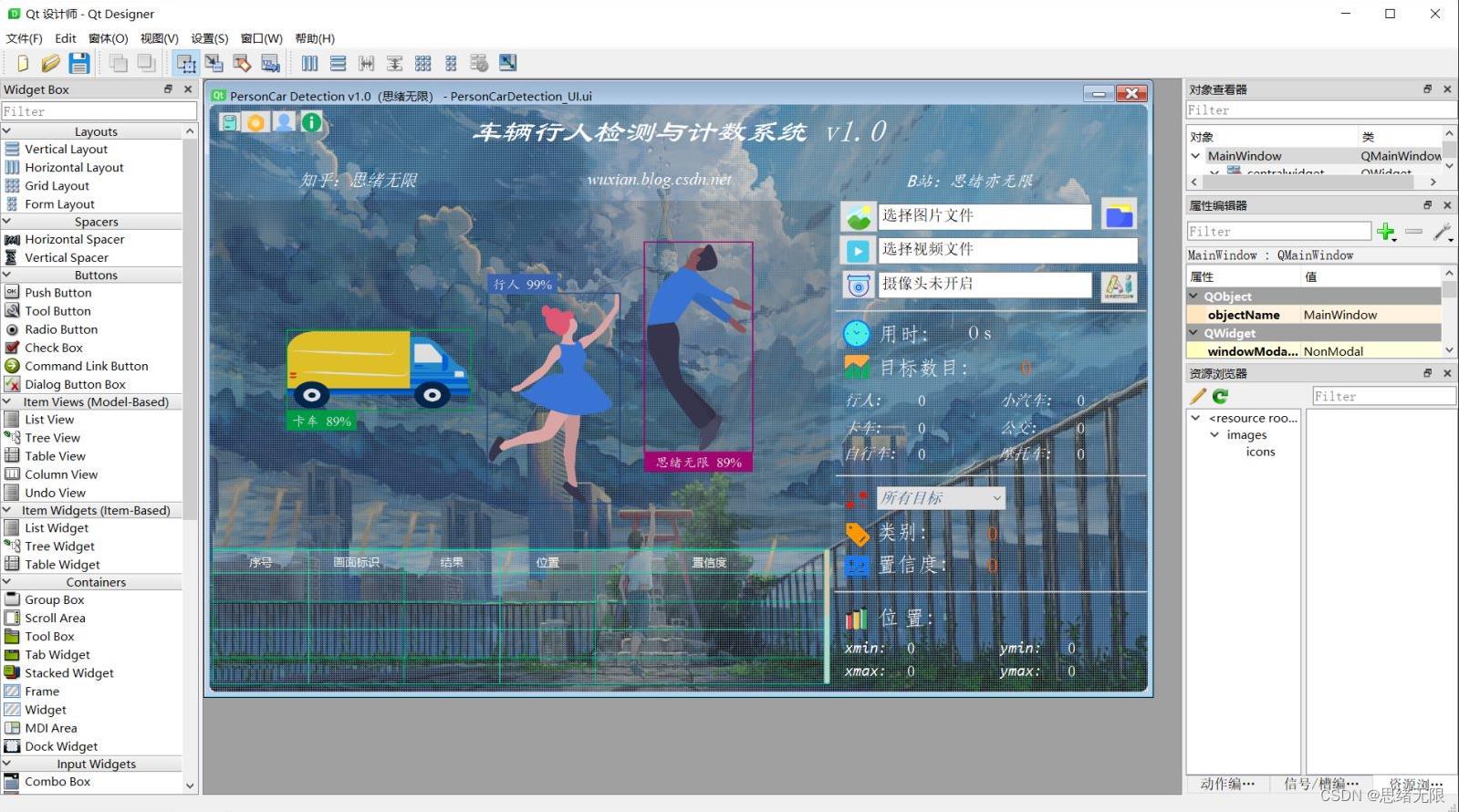
界面中文字、图标和背景图修改方法:
在Qt Designer中可以彻底修改界面的各个控件及设置,然后将ui文件转换为py文件即可调用和显示界面。如果只需要修改界面中的文字、图标和背景图的,可以直接在ConfigUI.config文件中修改,步骤如下:
(1)打开UI_rec/tools/ConfigUI.config文件,若乱码请选择GBK编码打开。
(2)如需修改界面文字,只要选中要改的字符替换成自己的就好。
(3)如需修改背景、图标等,只需修改图片的路径。例如,原文件中的背景图设置如下:
mainWindow = :/images/icons/back-image.png
可修改为自己的名为background2.png图片(位置在UI_rec/icons/文件夹中),可将该项设置如下即可修改背景图:
mainWindow = ./icons/background2.png
结束语
由于博主能力有限,博文中提及的方法即使经过试验,也难免会有疏漏之处。希望您能热心指出其中的错误,以便下次修改时能以一个更完美更严谨的样子,呈现在大家面前。同时如果有更好的实现方法也请您不吝赐教。
以上是关于目标检测与识别车辆信息原理与实践详解的主要内容,如果未能解决你的问题,请参考以下文章
行人车辆检测与计数系统(Python+YOLOv5深度学习模型+清新界面)
23年 车辆检测+车距检测+行人检测+车辆识别+车距预测(附yolo v5最新版源码)