人员密度检测基于形态学处理和GRNN网络的人员密度检测matlab仿真
Posted fpga和matlab
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了人员密度检测基于形态学处理和GRNN网络的人员密度检测matlab仿真相关的知识,希望对你有一定的参考价值。
1.软件版本
matlab2015b
2.算法概述
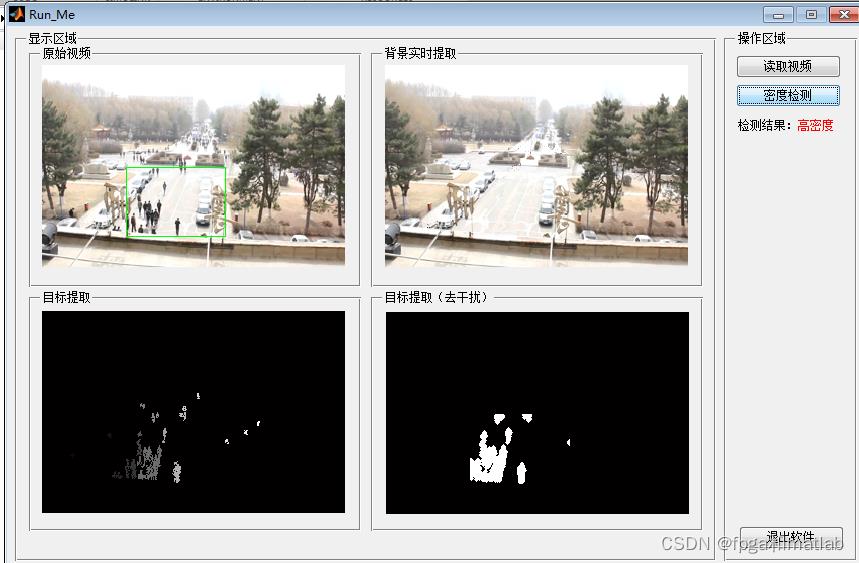
人群密度情况分为三个等级,(1)稀少和不拥挤情况下为绿色提醒。(2)比较拥挤情况下,黄色预警。(3)非常拥挤情况下,红色报警。 不同人群密度情况通过相应的报警级别在界面上实时显示出来
人群密度分类两种思路:
(1)估计在景人数,根据人数多少,判断人群密度情形。
(2)提取分析人群的整体特征,训练样本,利用分类器学习分类。
首先对视频进行纹理提取,采用的方法是灰度共生矩阵:
http://wenku.baidu.com/view/d60d9ff5ba0d4a7302763ae1.html?from=search
然后通过GRNN神经网络训练识别算法:
广义回归神经网络(Generalized regression neural network, GRNN)是一种建立在非参数核回归基础之上的神经网络,通过观测样本计算自变量和因变量之间的概率密度函数。GRNN结构如图1所示,整个网络包括四层神经元:输入层、模式层、求和层与输出层。
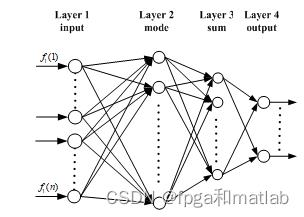
GRNN神经网络的性能,主要通过对其隐回归单元的核函数的光滑因子来设置的,不同的光滑因子可获得不同的网络性能。输入层的神经元数目与学习样本中输入向量的维数m相等。每个神经元都分别对应一个不同的学习样本,模式层中第i个神经元的传递函数为:
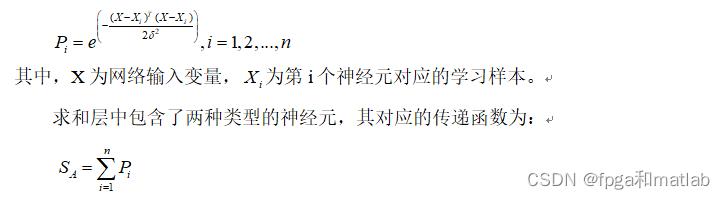
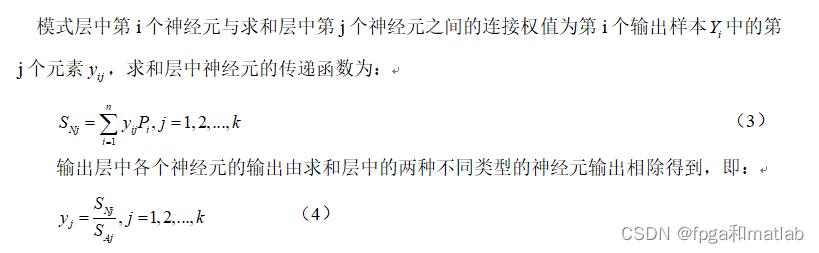
由此可以看出,当选择出学习样本之后,GRNN网络的结构与权值都是完全确定的,因而训练GRNN网络要比训练BP网络和RBF网络便捷得多。根据上述GRNN网络的各个层的输出计算公式,整个GRNN网络的输出可用如的式子表示:

3.部分源码
function pushbutton2_Callback(hObject, eventdata, handles)
% hObject handle to pushbutton2 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
global frameNum_Original;
global frameNum_Originals;
global Obj;
%%
%参数初始化
%处理视频大小
RR = 200;
CC = 300;
K = 3; %组件
Alpha = 0.02; %适应权重速度
Rho = 0.01; %适应权重速度协方差
Deviation_sq = 49; %阈值用于查找匹配
Variance = 2; %初始方差为新放置组件
Props = 0.00001; %最初为新放置
Back_Thresh = 0.8; %体重的比例必须占背景模型
Comp_Thresh = 10; %滤掉连接组件的较小的尺寸
SHADOWS =[0.7,0.25,0.85,0.95]; %设置阴影去除门限值
CRGB = 3;
D = RR * CC;
Temps = zeros(RR,CC,CRGB,'uint8');
Temps = imresize(read(Obj,1),[RR,CC]);
Temps = reshape(Temps,size(Temps,1)*size(Temps,2),size(Temps,3));
Mus = zeros(D,K,CRGB);
Mus(:,1,:) = double(Temps(:,:,1));
Mus(:,2:K,:) = 255*rand([D,K-1,CRGB]);
Sigmas = Variance*ones(D,K,CRGB);
Weights = [ones(D,1),zeros(D,K-1)];
Squared = zeros(D,K);
Gaussian = zeros(D,K);
Weight = zeros(D,K);
background = zeros(RR,CC,frameNum_Original);
Shadows = zeros(RR,CC);
Images0 = zeros(RR,CC,frameNum_Original);
Images1 = zeros(RR,CC,frameNum_Original);
Images2 = zeros(RR,CC,frameNum_Original);
background_Update = zeros(RR,CC,CRGB,frameNum_Original);
indxx = 0;
for tt = frameNum_Originals
disp('当前帧数');
tt
indxx = indxx + 1;
pixel_original = read(Obj,tt);
pixel_original2 = imresize(pixel_original,[RR,CC]);
Temp = zeros(RR,CC,CRGB,'uint8');
Temp = pixel_original2;
Temp = reshape(Temp,size(Temp,1)*size(Temp,2),size(Temp,3));
image = Temp;
for kk = 1:K
Datac = double(Temp)-reshape(Mus(:,kk,:),D,CRGB);
Squared(:,kk) = sum((Datac.^ 2)./reshape(Sigmas(:,kk,:),D,CRGB),2);
end
[junk,index] = min(Squared,[],2);
Gaussian = zeros(size(Squared));
Gaussian(sub2ind(size(Squared),1:length(index),index')) = ones(D,1);
Gaussian = Gaussian&(Squared<Deviation_sq);
%参数更新
Weights = (1-Alpha).*Weights+Alpha.*Gaussian;
for kk = 1:K
pixel_matched = repmat(Gaussian(:,kk),1,CRGB);
pixel_unmatched = abs(pixel_matched-1);
Mu_kk = reshape(Mus(:,kk,:),D,CRGB);
Sigma_kk = reshape(Sigmas(:,kk,:),D,CRGB);
Mus(:,kk,:) = pixel_unmatched.*Mu_kk+pixel_matched.*(((1-Rho).*Mu_kk)+(Rho.*double(image)));
Mu_kk = reshape(Mus(:,kk,:),D,CRGB);
Sigmas(:,kk,:) = pixel_unmatched.*Sigma_kk+pixel_matched.*(((1-Rho).*Sigma_kk)+repmat((Rho.* sum((double(image)-Mu_kk).^2,2)),1,CRGB));
end
replaced_gaussian = zeros(D,K);
mismatched = find(sum(Gaussian,2)==0);
for ii = 1:length(mismatched)
[junk,index] = min(Weights(mismatched(ii),:)./sqrt(Sigmas(mismatched(ii),:,1)));
replaced_gaussian(mismatched(ii),index) = 1;
Mus(mismatched(ii),index,:) = image(mismatched(ii),:);
Sigmas(mismatched(ii),index,:) = ones(1,CRGB)*Variance;
Weights(mismatched(ii),index) = Props;
end
Weights = Weights./repmat(sum(Weights,2),1,K);
active_gaussian = Gaussian+replaced_gaussian;
%背景分割
[junk,index] = sort(Weights./sqrt(Sigmas(:,:,1)),2,'descend');
bg_gauss_good = index(:,1);
linear_index = (index-1)*D+repmat([1:D]',1,K);
weights_ordered = Weights(linear_index);
for kk = 1:K
Weight(:,kk)= sum(weights_ordered(:,1:kk),2);
end
bg_gauss(:,2:K) = Weight(:,1:(K-1)) < Back_Thresh;
bg_gauss(:,1) = 1;
bg_gauss(linear_index) = bg_gauss;
active_background_gaussian = active_gaussian & bg_gauss;
foreground_pixels = abs(sum(active_background_gaussian,2)-1);
foreground_map = reshape(sum(foreground_pixels,2),RR,CC);
Images1 = foreground_map;
objects_map = zeros(size(foreground_map),'int32');
object_sizes = [];
Obj_pos = [];
new_label = 1;
%计算连通区域
[label_map,num_labels] = bwlabel(foreground_map,8);
for label = 1:num_labels
object = (label_map == label);
object_size = sum(sum(object));
if(object_size >= Comp_Thresh)
objects_map = objects_map + int32(object * new_label);
object_sizes(new_label) = object_size;
[X,Y] = meshgrid(1:CC,1:RR);
object_x = X.*object;
object_y = Y.*object;
Obj_pos(:,new_label) = [sum(sum(object_x)) / object_size;
sum(sum(object_y)) / object_size];
new_label = new_label + 1;
end
end
num_objects = new_label - 1;
%去除阴影
index = sub2ind(size(Mus),reshape(repmat([1:D],CRGB,1),D*CRGB,1),reshape(repmat(bg_gauss_good',CRGB,1),D*CRGB,1),repmat([1:CRGB]',D,1));
background = reshape(Mus(index),CRGB,D);
background = reshape(background',RR,CC,CRGB);
background = uint8(background);
if indxx <= 500;
background_Update = background;
else
background_Update = background_Update;
end
background_hsv = rgb2hsv(background);
image_hsv = rgb2hsv(pixel_original2);
for i = 1:RR
for j = 1:CC
if (objects_map(i,j))&&...
(abs(image_hsv(i,j,1)-background_hsv(i,j,1))<SHADOWS(1))&&...
(image_hsv(i,j,2)-background_hsv(i,j,2)<SHADOWS(2))&&...
(SHADOWS(3)<=image_hsv(i,j,3)/background_hsv(i,j,3)<=SHADOWS(4))
Shadows(i,j) = 1;
else
Shadows(i,j) = 0;
end
end
end
Images0 = objects_map;
objecs_adjust_map = Shadows;
Images2 = objecs_adjust_map;
%%
%根据像素所在区域大小比例以及纹理特征分析获得人密度
%腐蚀处理
se = strel('ball',6,6);
Images2BW = floor(abs(imdilate(Images2,se)-5));
Images3BW = zeros(size(Images2BW));
X1 = round(168/2);
X2 = round(363/2);
Y1 = round(204/2);
Y2 = round(339/2);
if indxx > 80;
%计算区域内像素值
S1 = sum(sum(Images2BW(Y1:Y2,X1:X2)));
S2(indxx-80) = S1/((X2-X1)*(Y2-Y1));
end
Images3BW(Y1:Y2,X1:X2) = Images2BW(Y1:Y2,X1:X2);
Images3Brgb = pixel_original2(Y1:Y2,X1:X2,:);
%纹理检测
%计算纹理
[A,B] = func_wenli(rgb2gray(Images3Brgb));
%选择能量 熵作为判断依据
if indxx > 80;
F1(indxx-80) = A(1);
F2(indxx-80) = A(2);
F3(indxx-80) = A(3);
end
if indxx > 80;
load train_model.mat
P = [S2(indxx-80);F2(indxx-80)];
y = round(NET(P));
if y == 1
set(handles.text2,'String','低密度');
set(handles.text2,'ForegroundColor',[0 1 0]) ;
end
if y == 2
set(handles.text2,'String','中密度');
set(handles.text2,'ForegroundColor',[1 1 0]) ;
end
if y == 3
set(handles.text2,'String','高密度');
set(handles.text2,'ForegroundColor',[1 0 0]) ;
end
end
axes(handles.axes1)
imshow(pixel_original2);
% title('定位检测区域');
hold on
line([X1,X2],[Y1,Y1],'LineWidth',1,'Color',[0 1 0]);
hold on
line([X2,X2],[Y1,Y2],'LineWidth',1,'Color',[0 1 0]);
hold on
line([X2,X1],[Y2,Y2],'LineWidth',1,'Color',[0 1 0]);
hold on
line([X1,X1],[Y2,Y1],'LineWidth',1,'Color',[0 1 0]);
axes(handles.axes2)
imshow(uint8(background_Update));
% title('背景获得');
axes(handles.axes3)
imshow(Images0,[]);
% title('动态背景提取');
axes(handles.axes4)
imshow(Images3BW,[]);
% title('动态背景提取(检测区域内)');
pause(0.0000001);
end
4.仿真结果
以上是关于人员密度检测基于形态学处理和GRNN网络的人员密度检测matlab仿真的主要内容,如果未能解决你的问题,请参考以下文章