PID控制器开发笔记之九:基于前馈补偿的PID控制器的实现
Posted 王张飞
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了PID控制器开发笔记之九:基于前馈补偿的PID控制器的实现相关的知识,希望对你有一定的参考价值。
对于一般的时滞系统来说,设定值的变动会产生较大的滞后才能反映在被控变量上,从而产生合理的调节。而前馈控制系统是根据扰动或给定值的变化按补偿原理来工作的控制系统,其特点是当扰动产生后,被控变量还未变化以前,根据扰动作用的大小进行控制,以补偿扰动作用对被控变量的影响。前馈控制系统运用得当,可以使被控变量的扰动消灭在萌芽之中,使被控变量不会因扰动作用或给定值变化而产生偏差,它较之反馈控制能更加及时地进行控制,并且不受系统滞后的影响。
1、前馈控制基本思想
在高精度伺服控制中,前馈控制可用来提高系统的跟踪性能。经典控制理论中的前馈控制设计是基于复合控制思想的,当闭环系统为连续系统时,使前馈环节与闭环系统的传递函数之积为1,从而实现输出完全复现输入。其系统结构图如下:
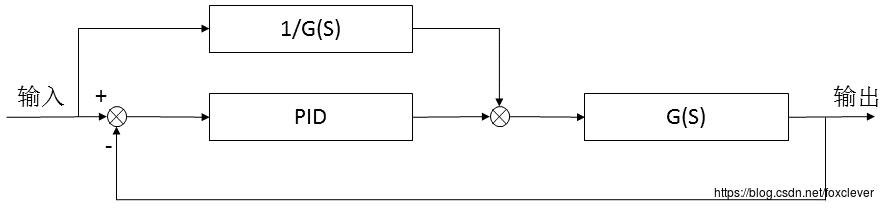
从上图中,我们可以发现前馈环节的传递函数是被控对象的倒数。那么就是在使用前馈控制前我们需要对被控对象的模型有了解,才能有针对性的设计出合适的前馈控制器。也就说,每个系统的前馈控制器都是不一样的,每个前馈控制器都是专用的。
要实施前馈控制,首先我们必须得到被控系统的近似模型,这个模型越接近真实的系统,控制的效果就越明显。在这里我们假定一个被控对向的模型为:
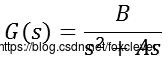
那么前馈控制器是被控对象的倒数,于是我们可以推导出前馈控制器的输入输出表达式为:
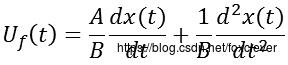
我们将其离散化,就可以得到我们想要实现的前馈控制器的输出公式。前馈控制器的输入是设定值,所以表示如下:

2、算法实现
经过上面的分析我们可以实现一个前馈控制器,前馈控制器的输出与设定值当前值、前一拍的值以及前两拍的只有关。也就是说如果设定值长时间不变化,该前馈控制器是不起作用的。当然每一个前馈控制器都是不一样的。
由于A、B、T均为常数于是我们为了书写方便,令α=A/(B*T),β=1/(B*T*T)于是我们可以先实现前馈控制器。定义一个前馈控制器的结构体:
/*定义前馈控制器的结构体*/typedef struct float rin; float lastRin; float perrRin;FFC /*实现前馈控制器*/float FeedforwardController(FFC vFFC) float result; result=α*(vFFC->rin-vFFC->lastRin)+β*(vFFC->rin-2*vFFC->lastRin+vFFC->perrRin); vFFC->perrRin= vFFC->lastRin; vFFC->lastRin= vFFC->rin; return result;
有了这个前馈控制器,只需要与PID控制器的输出合并在一起就好了U(k)=Up(k)+Uf(k),而PID控制器采用位置型还是增量型都没有关系。不过在调用这两个控制器时需:
vFFC->rin=vPID-> setpoint
3、总结
前馈控制器是一种补偿控制,或者说模型控制,其特点就是必须能得到被控对象的精确模型或者近似模型才能起到较好的控制效果。对于时滞系统的模型控制有很多方法,前馈控制是其中比较简单和应用较广的算法。
系统中存在频率高、幅度大、可测量而不可控的扰动时,可选用前馈控制。
当控制系统控制通道滞后时间长、反馈控制又不能获得良好效果时,可选用前馈控制。
以上是关于PID控制器开发笔记之九:基于前馈补偿的PID控制器的实现的主要内容,如果未能解决你的问题,请参考以下文章