机器人系统(含自动驾驶等)的安全性
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了机器人系统(含自动驾驶等)的安全性相关的知识,希望对你有一定的参考价值。
安全性是所有系统核心属性。本文仅侧重软件系统。
- 主动安全
- 被动安全
一种情况是在自身执行或运行过程中,安全性能,硬件漏洞不涉及。
目前,电脑+手机等系统,在无外界干扰情况下,安全性能通常是安全的,bug不致命。
广义机器人系统目前还不能做到这一点,大部分内部bug多多,并且隐藏非常深,bug致命。
如上为引用。
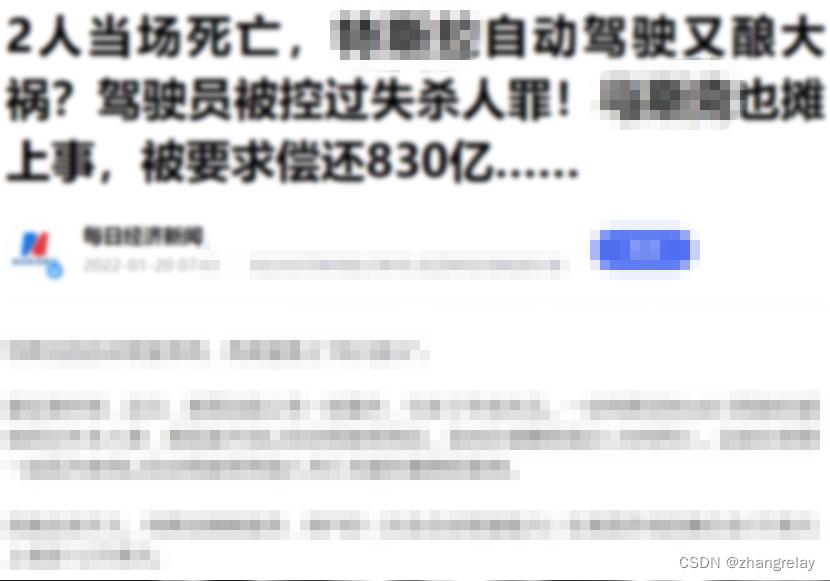
需要自行搜索,驾驶员也是驾驶安全员,但是此类机器人系统,也就是自动驾驶系统存在bug,使用时务必注意。
电脑/手机黑屏/蓝屏/死机,但是机器人危害会大很多。
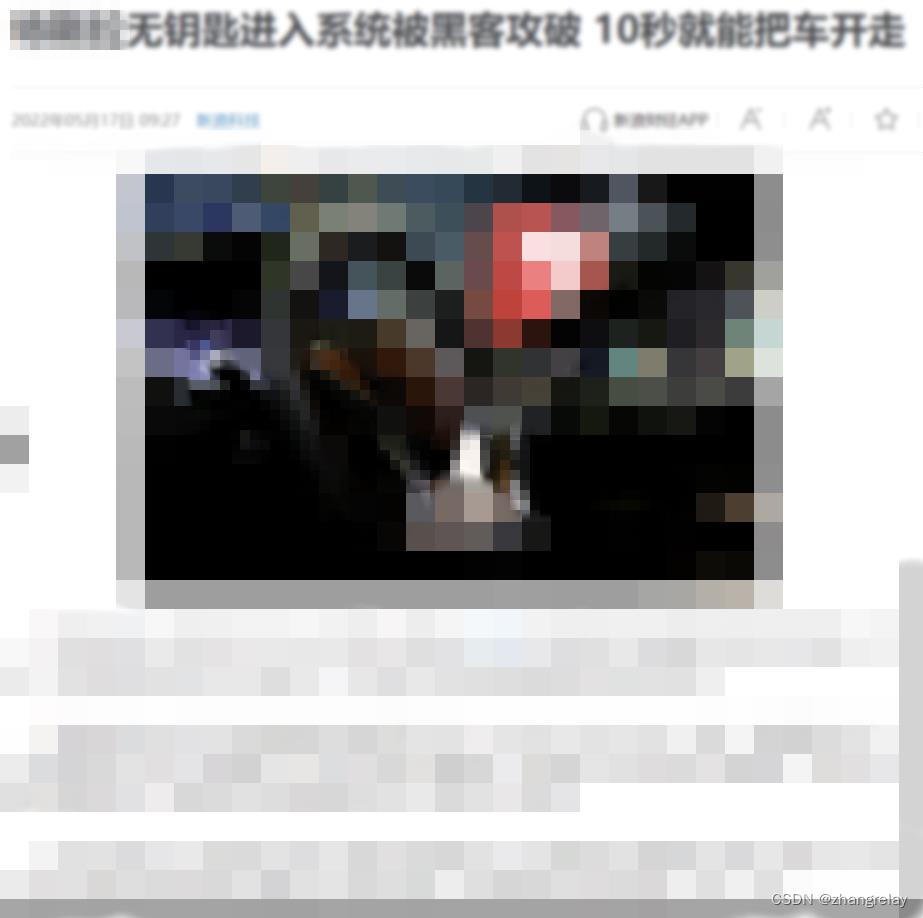
还有一种情况是在外部攻击情况下的安全性,硬件攻击不涉及。
这一块,电脑/手机在普通用户手中,如同“没有上锁的门”。
那么,机器人这块就更不用说了,基本上就是个“傀儡”,安全性形同虚设。
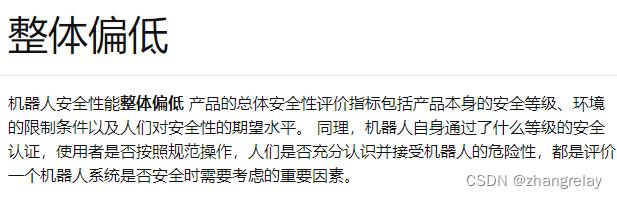
现在家中清扫机器人装配有各类传感器,摄像头/激光测距雷达等,并且都联网,专业人士操控易如反掌。
当然有规定禁止这么做,但当发展到一定阶段,利益足够大,不免有人会如此。

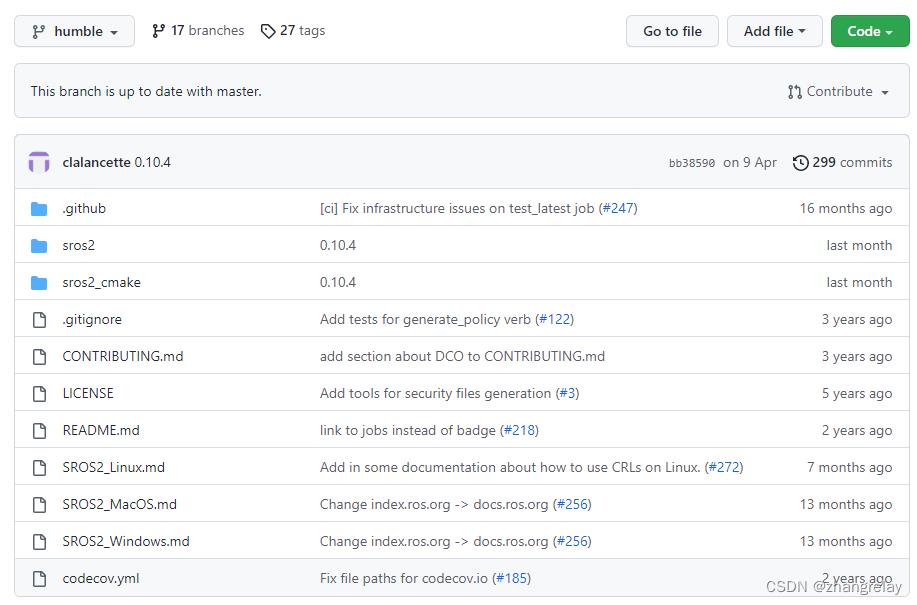
2019年 ☞ ROS2网络多机通信DDS和安全加密SROS(多机器人系统)
例如,ROS2系统中的SROS组件:
该软件包提供了在 DDS-Security 之上使用 ROS2 的工具和说明。 该安全功能已跨平台(Linux、macOS 和 Windows)以及跨不同语言(C++ 和 Python)进行测试。
虽然正在设计 SROS2 以与任何安全中间件一起使用,但目前正在使用 RTI Connext Secure 5.3.1 和 eProsima 的 Fast-RTPS 1.6.0 进行测试。 如果想使用 RTI Connext Secure 运行演示,将需要它的许可证并且需要安装。
这部分测试过,仅为一些加密功能,如果要实现仅软件层的全栈安全,还差很远很远。
以上是关于机器人系统(含自动驾驶等)的安全性的主要内容,如果未能解决你的问题,请参考以下文章
自动驾驶未来汽车将由软件来定义 黑莓QNX为自动驾驶安全性护航
免费报告国家工业信息安全发展研究中心-自动驾驶数据安全白皮书.pdf