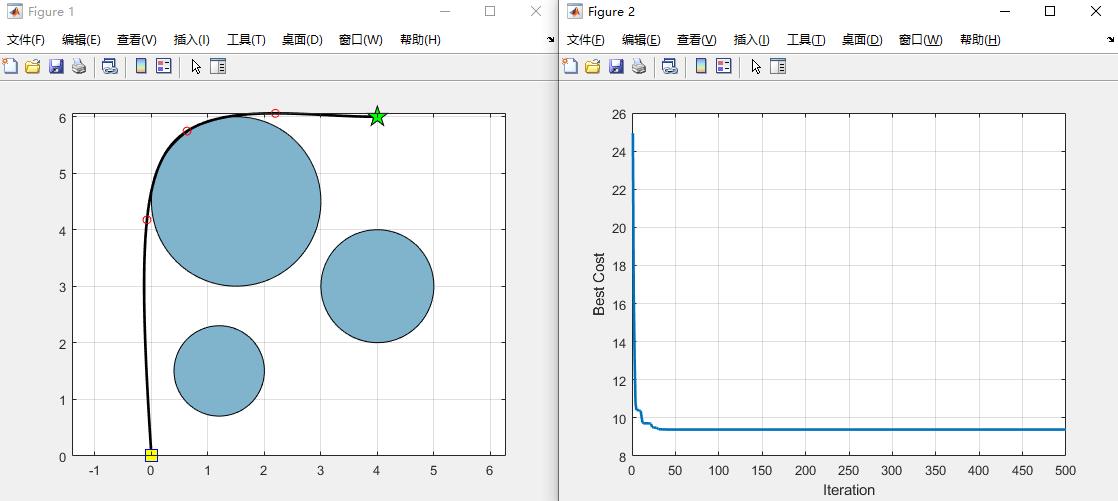
PSO路径规划基于PSO优化算法的动态路径规划MATLAB仿真
Posted fpga&matlab
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了PSO路径规划基于PSO优化算法的动态路径规划MATLAB仿真相关的知识,希望对你有一定的参考价值。
1.软件版本
MATLAB2021a
2.部分核心代码
clc;
clear;
close all;
%% Problem Definition
model=CreateModel();
model.n=3; % number of Handle Points
CostFunction=@(x) MyCost(x,model); % Cost Function
nVar=model.n; % Number of Decision Variables
VarSize=[1 nVar]; % Size of Decision Variables Matrix
VarMin.x=model.xmin; % Lower Bound of Variables
VarMax.x=model.xmax; % Upper Bound of Variables
VarMin.y=model.ymin; % Lower Bound of Variables
VarMax.y=model.ymax; % Upper Bound of Variables
%% PSO Parameters
MaxIt=500; % Maximum Number of Iterations
nPop=150; % Population Size (Swarm Size)
w=1; % Inertia Weight
wdamp=0.98; % Inertia Weight Damping Ratio
c1=1.5; % Personal Learning Coefficient
c2=1.5; % Global Learning Coefficient
% % Constriction Coefficient
% phi1=2.05;
% phi2=2.05;
% phi=phi1+phi2;
% chi=2/(phi-2+sqrt(phi^2-4*phi));
% w=chi; % Inertia Weight
% wdamp=1; % Inertia Weight Damping Ratio
% c1=chi*phi1; % Personal Learning Coefficient
% c2=chi*phi2; % Global Learning Coefficient
alpha=0.1;
VelMax.x=alpha*(VarMax.x-VarMin.x); % Maximum Velocity
VelMin.x=-VelMax.x; % Minimum Velocity
VelMax.y=alpha*(VarMax.y-VarMin.y); % Maximum Velocity
VelMin.y=-VelMax.y; % Minimum Velocity
%% Initialization
% Create Empty Particle Structure
empty_particle.Position=[];
empty_particle.Velocity=[];
empty_particle.Cost=[];
empty_particle.Sol=[];
empty_particle.Best.Position=[];
empty_particle.Best.Cost=[];
empty_particle.Best.Sol=[];
% Initialize Global Best
GlobalBest.Cost=inf;
% Create Particles Matrix
particle=repmat(empty_particle,nPop,1);
% Initialization Loop
for i=1:nPop
% Initialize Position
if i > 1
particle(i).Position=CreateRandomSolution(model);
else
% Straight line from source to destination
xx = linspace(model.xs, model.xt, model.n+2);
yy = linspace(model.ys, model.yt, model.n+2);
particle(i).Position.x = xx(2:end-1);
particle(i).Position.y = yy(2:end-1);
end
% Initialize Velocity
particle(i).Velocity.x=zeros(VarSize);
particle(i).Velocity.y=zeros(VarSize);
% Evaluation
[particle(i).Cost, particle(i).Sol]=CostFunction(particle(i).Position);
% Update Personal Best
particle(i).Best.Position=particle(i).Position;
particle(i).Best.Cost=particle(i).Cost;
particle(i).Best.Sol=particle(i).Sol;
% Update Global Best
if particle(i).Best.Cost<GlobalBest.Cost
GlobalBest=particle(i).Best;
end
end
% Array to Hold Best Cost Values at Each Iteration
BestCost=zeros(MaxIt,1);
%% PSO Main Loop
for it=1:MaxIt
for i=1:nPop
% x Part
% Update Velocity
particle(i).Velocity.x = w*particle(i).Velocity.x ...
+ c1*rand(VarSize).*(particle(i).Best.Position.x-particle(i).Position.x) ...
+ c2*rand(VarSize).*(GlobalBest.Position.x-particle(i).Position.x);
% Update Velocity Bounds
particle(i).Velocity.x = max(particle(i).Velocity.x,VelMin.x);
particle(i).Velocity.x = min(particle(i).Velocity.x,VelMax.x);
% Update Position
particle(i).Position.x = particle(i).Position.x + particle(i).Velocity.x;
% Velocity Mirroring
OutOfTheRange=(particle(i).Position.x<VarMin.x | particle(i).Position.x>VarMax.x);
particle(i).Velocity.x(OutOfTheRange)=-particle(i).Velocity.x(OutOfTheRange);
% Update Position Bounds
particle(i).Position.x = max(particle(i).Position.x,VarMin.x);
particle(i).Position.x = min(particle(i).Position.x,VarMax.x);
% y Part
% Update Velocity
particle(i).Velocity.y = w*particle(i).Velocity.y ...
+ c1*rand(VarSize).*(particle(i).Best.Position.y-particle(i).Position.y) ...
+ c2*rand(VarSize).*(GlobalBest.Position.y-particle(i).Position.y);
% Update Velocity Bounds
particle(i).Velocity.y = max(particle(i).Velocity.y,VelMin.y);
particle(i).Velocity.y = min(particle(i).Velocity.y,VelMax.y);
% Update Position
particle(i).Position.y = particle(i).Position.y + particle(i).Velocity.y;
% Velocity Mirroring
OutOfTheRange=(particle(i).Position.y<VarMin.y | particle(i).Position.y>VarMax.y);
particle(i).Velocity.y(OutOfTheRange)=-particle(i).Velocity.y(OutOfTheRange);
% Update Position Bounds
particle(i).Position.y = max(particle(i).Position.y,VarMin.y);
particle(i).Position.y = min(particle(i).Position.y,VarMax.y);
% Evaluation
[particle(i).Cost, particle(i).Sol]=CostFunction(particle(i).Position);
% Update Personal Best
if particle(i).Cost<particle(i).Best.Cost
particle(i).Best.Position=particle(i).Position;
particle(i).Best.Cost=particle(i).Cost;
particle(i).Best.Sol=particle(i).Sol;
% Update Global Best
if particle(i).Best.Cost<GlobalBest.Cost
GlobalBest=particle(i).Best;
end
end
end
% Update Best Cost Ever Found
BestCost(it)=GlobalBest.Cost;
% Inertia Weight Damping
w=w*wdamp;
% Show Iteration Information
if GlobalBest.Sol.IsFeasible
Flag=' *';
else
Flag=[', Violation = ' num2str(GlobalBest.Sol.Violation)];
end
disp(['Iteration ' num2str(it) ': Best Cost = ' num2str(BestCost(it)) Flag]);
% Plot Solution
figure(1);
PlotSolution(GlobalBest.Sol,model);
pause(0.01);
end
%% Results
figure;
plot(BestCost,'LineWidth',2);
xlabel('Iteration');
ylabel('Best Cost');
grid on;
3.操作步骤与仿真结论
4.完整源码获得方式
方式1:微信或者QQ联系博主
方式2:订阅MATLAB/FPGA教程,免费获得教程案例以及任意2份完整源码
以上是关于PSO路径规划基于PSO优化算法的动态路径规划MATLAB仿真的主要内容,如果未能解决你的问题,请参考以下文章
路径规划基于粒子群算法机器人路径规划动画演示matlab源码含GUI