路径规划基于粒子群算法机器人路径规划动画演示matlab源码含GUI
Posted Matlab咨询QQ1575304183
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了路径规划基于粒子群算法机器人路径规划动画演示matlab源码含GUI相关的知识,希望对你有一定的参考价值。
一、简介
1 粒子群算法的概念
粒子群优化算法(PSO:Particle swarm optimization) 是一种进化计算技术(evolutionary computation)。源于对鸟群捕食的行为研究。粒子群优化算法的基本思想:是通过群体中个体之间的协作和信息共享来寻找最优解.
PSO的优势:在于简单容易实现并且没有许多参数的调节。目前已被广泛应用于函数优化、神经网络训练、模糊系统控制以及其他遗传算法的应用领域。
2 粒子群算法分析
2.1基本思想
粒子群算法通过设计一种无质量的粒子来模拟鸟群中的鸟,粒子仅具有两个属性:速度和位置,速度代表移动的快慢,位置代表移动的方向。每个粒子在搜索空间中单独的搜寻最优解,并将其记为当前个体极值,并将个体极值与整个粒子群里的其他粒子共享,找到最优的那个个体极值作为整个粒子群的当前全局最优解,粒子群中的所有粒子根据自己找到的当前个体极值和整个粒子群共享的当前全局最优解来调整自己的速度和位置。下面的动图很形象地展示了PSO算法的过程:
2 更新规则
PSO初始化为一群随机粒子(随机解)。然后通过迭代找到最优解。在每一次的迭代中,粒子通过跟踪两个“极值”(pbest,gbest)来更新自己。在找到这两个最优值后,粒子通过下面的公式来更新自己的速度和位置。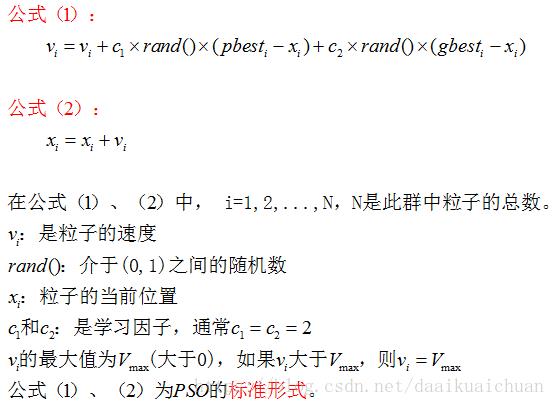
公式(1)的第一部分称为【记忆项】,表示上次速度大小和方向的影响;公式(1)的第二部分称为【自身认知项】,是从当前点指向粒子自身最好点的一个矢量,表示粒子的动作来源于自己经验的部分;公式(1)的第三部分称为【群体认知项】,是一个从当前点指向种群最好点的矢量,反映了粒子间的协同合作和知识共享。粒子就是通过自己的经验和同伴中最好的经验来决定下一步的运动。以上面两个公式为基础,形成了PSO的标准形式。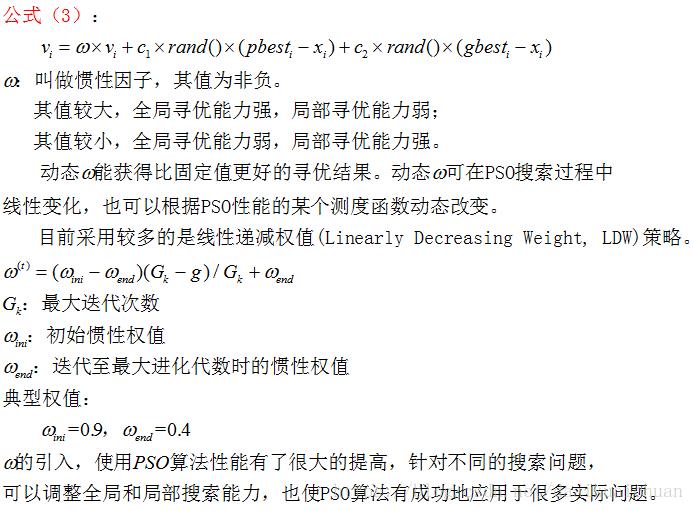
公式(2)和 公式(3)被视为标准PSO算法。
3 PSO算法的流程和伪代码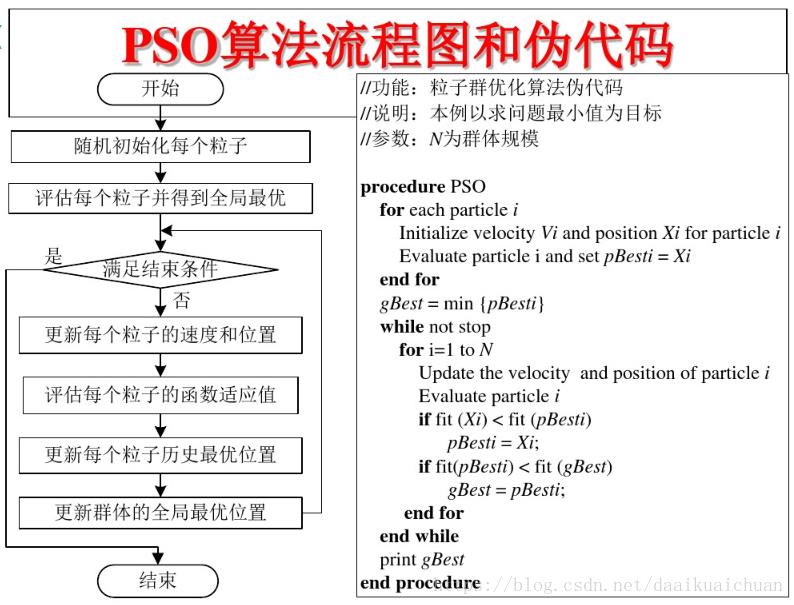
二、源代码
function varargout = PSM(varargin)
% PSM MATLAB code for PSM.fig
% PSM, by itself, creates a new PSM or raises the existing
% singleton*.
%
% H = PSM returns the handle to a new PSM or the handle to
% the existing singleton*.
%
% PSM('CALLBACK',hObject,eventData,handles,...) calls the local
% function named CALLBACK in PSM.M with the given input arguments.
%
% PSM('Property','Value',...) creates a new PSM or raises the
% existing singleton*. Starting from the left, property value pairs are
% applied to the GUI before PSM_OpeningFcn gets called. An
% unrecognized property name or invalid value makes property application
% stop. All inputs are passed to PSM_OpeningFcn via varargin.
%
% *See GUI Options on GUIDE's Tools menu. Choose "GUI allows only one
% instance to run (singleton)".
%
% See also: GUIDE, GUIDATA, GUIHANDLES
% Edit the above text to modify the response to help PSM
% Last Modified by GUIDE v2.5 22-May-2021 21:08:35
% Begin initialization code - DO NOT EDIT
gui_Singleton = 1;
gui_State = struct('gui_Name', mfilename, ...
'gui_Singleton', gui_Singleton, ...
'gui_OpeningFcn', @PSM_OpeningFcn, ...
'gui_OutputFcn', @PSM_OutputFcn, ...
'gui_LayoutFcn', [] , ...
'gui_Callback', []);
if nargin && ischar(varargin{1})
gui_State.gui_Callback = str2func(varargin{1});
end
if nargout
[varargout{1:nargout}] = gui_mainfcn(gui_State, varargin{:});
else
gui_mainfcn(gui_State, varargin{:});
end
% End initialization code - DO NOT EDIT
% --- Executes just before PSM is made visible.
function PSM_OpeningFcn(hObject, eventdata, handles, varargin)
% This function has no output args, see OutputFcn.
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% varargin command line arguments to PSM (see VARARGIN)
% Choose default command line output for PSM
handles.output = hObject;
% Update handles structure
guidata(hObject, handles);
% UIWAIT makes PSM wait for user response (see UIRESUME)
% uiwait(handles.figure1);
% --- Outputs from this function are returned to the command line.
function varargout = PSM_OutputFcn(hObject, eventdata, handles)
% varargout cell array for returning output args (see VARARGOUT);
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Get default command line output from handles structure
varargout{1} = handles.output;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% --- Executes on button press in pushbutton5.
function pushbutton5_Callback(hObject, eventdata, handles)
% hObject handle to pushbutton5 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
s=[0 0];%起点位置
g=[0 100];%目标点起始位置
axis([-20 120 -20 120]);
axis equal;
hold on;
axis off;
fill([-20,120,120,-20],[-20 -20 120 120],'y')%填充动图区域
text(-5,-5,' Start','FontSize',12);%设定起点标识
fill([95,120,120,95],[-20 -20 10 10],'w')%设定说明区域
text(100,5,'Notes:','FontSize',12)
plot(101,-5,'sb','markerfacecolor','b');
text(101,-5,' Robot','FontSize',12);
plot(101,-15,'om','markerfacecolor','m');
text(101,-15,' Ball','FontSize',12);
plot(0,0,'bs')%起点处小车填充
car=plot(0,0,'sb','markerfacecolor','b');
object=plot(0,100,'om','markerfacecolor','m');%目标起点处填充
but=1;%十字光标初始化
x_obs=1;
y_obs=1;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% --- Executes on button press in pushbutton4.
function pushbutton4_Callback(hObject, eventdata, handles)
% hObject handle to pushbutton4 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
uiresume;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% --- Executes on button press in pushbutton3.
function pushbutton3_Callback(hObject, eventdata, handles)
% hObject handle to pushbutton3 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
uiwait;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% --- Executes on button press in pushbutton2.
function pushbutton2_Callback(hObject, eventdata, handles)
% hObject handle to pushbutton2 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
uiresume;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% --- Executes on button press in pushbutton1.
function pushbutton1_Callback(hObject, eventdata, handles)
% hObject handle to pushbutton1 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
%%%%%%%%%%%%%%%%%%绘制障碍%%%%%%%%%%%%%%%%%%
s=[0 0];%起点位置
g=[0 100];%目标起始位置
axis([-20 120 -20 120]);
axis equal;
hold on;
axis off;
fill([-20,120,120,-20],[-20 -20 120 120],'y')%填充动图区域
text(-5,-5,' Start','FontSize',12);%设定起点标识
fill([95,120,120,95],[-20 -20 10 10],'w')%设定说明区域
text(100,5,'Notes:','FontSize',12)
plot(101,-5,'sb','markerfacecolor','b');
text(101,-5,' Robot','FontSize',12);
plot(101,-15,'om','markerfacecolor','m');
text(101,-15,' Ball','FontSize',12);
plot(0,0,'bs')%起点处小车填充
car=plot(0,0,'sb','markerfacecolor','b');
object=plot(0,100,'om','markerfacecolor','m');%目标起点处填充
but=1;%十字光标初始化
x_obs=1;
y_obs=1;
num_obs=1;
%%%%%%%%%%%%%%开始检测光标%%%%%%%%%%%%%%%%
while but == 1
[x_obs,y_obs,but] = ginput(1);
if but==1
m_Obs(num_obs,:)=[x_obs y_obs];%储存障碍的中心点坐标
m_ObsR(num_obs)=3;
Theta=0:pi/20:pi;
xx =m_Obs(num_obs,1)+cos(Theta)*m_ObsR(num_obs);
yy= m_Obs(num_obs,2)+sin(Theta)*m_ObsR(num_obs);
fill(xx,yy,'w')
Theta=pi:pi/20:2*pi;
xx =m_Obs(num_obs,1)+cos(Theta)*m_ObsR(num_obs);
yy= m_Obs(num_obs,2)+sin(Theta)*m_ObsR(num_obs);
fill(xx,yy,'k')
num_obs=num_obs+1;
end
end %End of While loop
num_obs=num_obs-1;
uiwait;
%%%%%%%%%%%%%%%等待演示命令%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%定义全局变量%%%%%%%%%%%%%
%%%%粒子群的%%%%
global c1; %学习因子1
global c2; %学习因子2
global w; %惯性权重
global MaxDT; %最大迭代次数
global m; %搜索空间维数(未知数个数)
global N; %初始化群体个体数目
global eps; %设置精度(在已知最小值时候用)
global Kmax; %初始化x时用的最大迭代次数
global Qmax; %初始化x时粒子全部重新初始化用的最大迭代次数
global fitw1; %适应值函数中的两个权重
global fitw2;
global pathta ; %移动的角度为60度
global psosued; %粒子群成功
global pathsued; %路径可行
%%%%%%%%%%%%%%%%%路径规划%%%%%%%%%%%%%%%%%%%%%%%
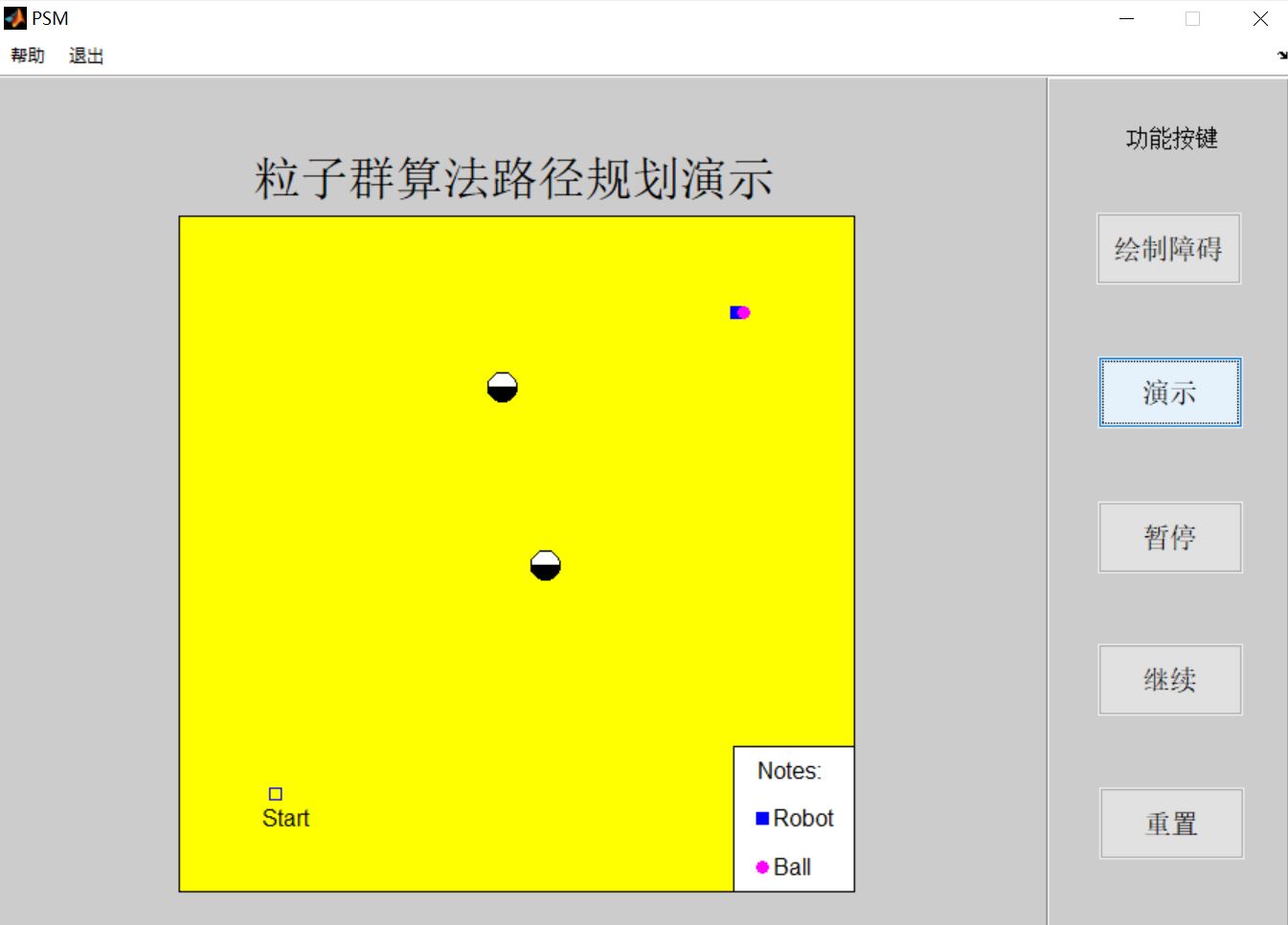
三、运行结果
四、备注
版本:2014a
以上是关于路径规划基于粒子群算法机器人路径规划动画演示matlab源码含GUI的主要内容,如果未能解决你的问题,请参考以下文章